一种双基地低频超宽带CSAR成像方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及雷达技术领域,更具体地,涉及一种双基地低频超宽带CSAR成像方法。
背景技术
在现代战争中,作战双方越来越注重对己方军事目标的隐蔽,同时提高对敌方隐蔽军事目标的探测侦察能力。因此,对隐蔽目标探测技术的研究能为我国新型战场侦察/制导武器装备的研制提供重要的理论和技术支持,具有重要的军事意义。此外,我国边境地理形势复杂,很多区域丛林密布,这为邻国在边境附近布设军事目标和调整军事防务提供了便利。由于具有丛林遮蔽,常规雷达系统无法穿透丛林对敌方进行有效探测侦察。因此,迫切需要研究先进体制雷达系统与技术,以提高对隐蔽军事目标的探测侦察能力。
低频超宽带合成孔径雷达(SAR)具有良好叶簇穿透探测性能和高分辨成像能力,已成为隐蔽目标探测侦察的重要手段。目前,国内已经开展了单基地低频超宽带SAR系统的研制,并作为我国某新型战场侦察/制导雷达已列装部队。但是,单基地低频超宽带SAR系统存在以下不足:(1)收发系统共用平台,安全性较差,抗干扰能力较弱;(2)叶簇穿透性能与作用距离成反比,导致探测侦察距离受限;(3)为了获取方位向高分辨率,需较长合成孔径;(4)只能接收目标的后向散射信息,对隐蔽目标的探测侦察性能受限;(5)由于天线基线长度等限制,降低了对隐蔽运动目标的探测侦察能力。
低频超宽带圆周SAR(CSAR)是一种圆周轨迹的低频超宽带SAR成像模式,在成像过程中天线波束始终指向观测场景,同时所搭载的雷达环绕观测场景作360°圆周运动。该模式的全方位观测可获得目标更多维度的散射信息。此外,观测方位角的增加展宽了目标方位频谱,从而获取得更高的图像分辨率,且具有一定的三维成像能力。近年来,国内外已开展大量的低频超宽带CSAR研究,并获得了良好的实验结果。此外,与直线轨迹低频超宽带SAR系统相比,低频超宽带CSAR系统具有更好的丛林隐蔽目标(如车辆)检测能力。双基地低频超宽带CSAR结合低频超宽带CSAR和双基地SAR的优势,是一种具有穿透叶簇对隐蔽目标全方位高分辨率成像能力,同时具备较高安全性和较强抗干扰能力的战场侦察/制导雷达系统。该雷达系统具备全方位探测能力、分辨率高、安全性高、探测距离大、隐蔽(运动)目标探测侦察能力强等优点,能满足对战场隐蔽目标的全方位高分辨率探测与侦察。
但是,复杂成像几何、较低频段信号、较大相对带宽和圆周合成孔径给双基地低频超宽带CSAR的成像处理带来了新的问题与挑战,如回波数据量较大、方位空变性较大、距离方位耦合性较强和运动误差较复杂等,这极大地增加了双基地低频超宽带CSAR高精度成像的难度和复杂度。
目前,现有的双基地SAR成像方法主要包含两大类:频域成像方法与时域成像方法。频域成像方法具有较高成像效率,但是对信号带宽、积累时间、运动误差、近似处理和存储要求等存在一定的限制。常用的频域成像方法(如距离-多普勒(RD)算法,波数域(WD)算法和线性调频变标(CS)算法等)仅适用于方位移不变双基地SAR的高效高精度成像。非线性调频变标(NLCS)算法虽然能实现方位移变双基地SAR的成像处理,但是它采用较大近似方法处理回波信号的方位空变性、距离方位耦合性和运动误差,导致双基地SAR成像处理存在较大的相位误差,从而难以获得良好聚焦的双基地SAR图像。因此,NLCS算法不适用于双基地低频超宽带CSAR的高效高精度成像。
与频域成像方法相比,时域成像方法(如后向投影(BP)算法)理论上无任何近似处理,成像精度高,能够适用于任意成像构型、任意信号波形双基地SAR的成像处理。因此,BP算法能够精确处理双基地低频超宽带CSAR回波信号的较大方位空变性、较强距离方位耦合性和较复杂运动误差,从而实现双基地低频超宽带CSAR的高精度成像。但是,BP算法具有极大的运算量,从而降低了其成像效率,因此BP算法不能作为标准成像方法来有效实现SAR高效高精度成像处理。为了克服BP算法高运算量的缺点,A.F.Yegulalp和L.M.H.Ulander等学者在单基地SAR成像处理中分别实现了高效BP算法,采用局部近似处理和递归孔径划分处理,能保持高精度成像的同时提高成像效率。高效BP算法主要包括快速BP(FBP)算法和快速因式分解BP(FFBP)算法。目前,Y.Ding、L.M.H.Ulander和V.T.Vu等学者已将FBP算法和FFBP算法扩展应用于双基地SAR的成像处理,并获得了良好聚焦的双基地SAR图像。然而,上述高效BP算法主要针对直线轨迹双基地SAR成像处理提出的,并不适用于双基地低频超宽带CSAR的高效高精度成像。因此,如何解决适用于双基地低频超宽带CSAR的高效高精度成像方法正是一个亟待解决的技术问题。
发明内容
本发明提供一种高效高精度的双基地低频超宽带CSAR成像方法。
为了达到上述技术效果,本发明的技术方案如下:
一种双基地低频超宽带CSAR成像方法,包括以下步骤:
S1:选定一个运动雷达和一个固定雷达,其中,运动雷达合成孔径的孔径点数为L,将其因式分解为K级,每次合并的子孔径数为l,则L=l
S2:对运动雷达和固定雷达进行子孔径划分与初始子图像生成,该过程视为对运动雷达和固定雷达的第1级处理;
S3:对步骤S2得到的数据进行循环递归子孔径合并与子图像生成,该过程视为对运动雷达和固定雷达的第k级处理;
S4:对步骤S3得到的数据进行全孔径合并与最终图像生成。
进一步地,所述步骤S2的具体过程是:
1)、将运动雷达的合成孔径划分为
2)、设第1级第n个初始子图像网格的网格原点为第1级第n个子孔径中心,第1级第n个初始子图像网格用
其中,
第1级第n个初始子图像网格的极距采样间隔
其中,λ
3)、将第1级第n个子孔径对应的距离压缩回波信号后向投影到第1级第n个初始子图像网格
其中,
进一步地,所述步骤S3的具体过程是:
1)、每l个第k-1级子孔径合并成一个第k级子孔径,对于第k级第q个子孔径,
2)、设
其中,
第k级第q个子图像网格的极距采样间隔
其中,
3)将l个第k-1级第q个子图像依次插值到第k级第q个子图像网格
其中,
进一步地,所述步骤S4具体过程是:
1)将l个第K-1级子孔径合并成一个第K级全孔径,首先在地面成像场景生成第K级图像网格,第K级图像网格用(x,y,0)表示,第K级图像网格的距离采样间隔Δx和方位采样间隔Δy满足下述约束条件:
其中,ρ
2)、将l个第K-1级子图像依次插值到第K级图像网格(x,y,0),并相干叠加生成第K级图像,即最终双基地低频超宽带CSAR图像:
其中,I(x,y,0)为第K级图像中网格点(x,y,0)的值,
进一步地,如果L=l
与现有技术相比,本发明技术方案的有益效果是:
本发明采用子孔径和子图像处理技术,能够有效解决双基地低频超宽带CSAR成像处理中较大方位空变性、较强距离方位耦合性和较复杂运动误差等问题,在保持高精度成像的同时,极大提高了成像处效率,从而实现了双基地低频超宽带CSAR的高效高精度成像,获得了高质量的聚焦双基地CSAR图像。该方法适用于各种搭载平台的双基地低频超宽带CSAR成像处理,如车载平台、机载平台和星载平台等。
附图说明
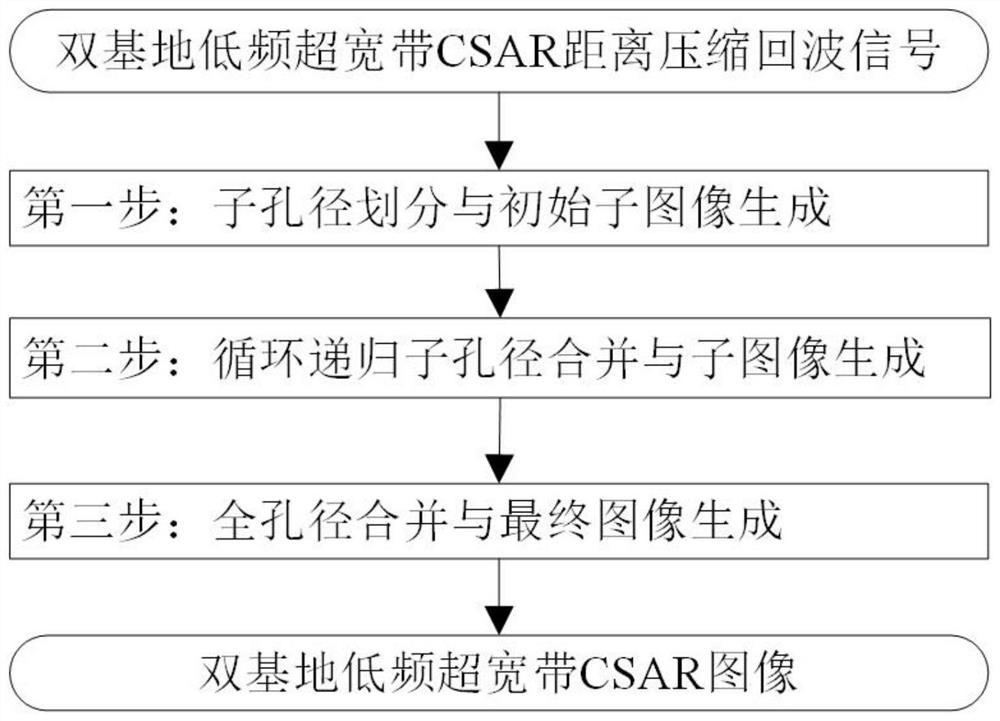
图1为本发明方法流程图;
图2为本发明成像场景目标分布图;
图3为原始BP算法获得的成像结果;
图4为本发明方法获得的成像结果。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
下面结合附图和实施例对本发明的技术方案做进一步的说明。
如图1所示,本发明提供一种双基地低频超宽带CSAR成像方法,包括以下步骤:
S1:选定一个运动雷达和一个固定雷达,其中,运动雷达合成孔径的孔径点数为L,将其因式分解为K级,每次合并的子孔径数为l,则L=l
S2:对运动雷达和固定雷达进行子孔径划分与初始子图像生成,该过程视为对运动雷达和固定雷达的第1级处理;
S3:对步骤S2得到的数据进行循环递归子孔径合并与子图像生成,该过程视为对运动雷达和固定雷达的第k级处理;
S4:对步骤S3得到的数据进行全孔径合并与最终图像生成。
本发明以一站固定双基地低频超宽带CSAR成像为实例进行说明,该雷达系统包含一个机载运动雷达和一个位于山顶的固定雷达。慢时间η时刻,运动雷达的位置为r
R(φ,r
角度φ时,运动雷达和固定雷达到网格采样点r的双程距离为:
R(φ,r)=R
其中,R
假设雷达发射基带信号为p(τ),经正交解调后,点目标P的回波信号为:
s(τ,φ)=σ
=σ
其中,τ为快时间,σ
s
其中,p
设运动雷达合成孔径的孔径点数为L,将其因式分解为K级,每次合并的子孔径数为l,则L=l
第一步,子孔径划分与初始子图像生成;
本步骤可视为第1级处理。第1级处理时,将运动雷达的合成孔径划分为
其中,
第1级第n个初始子图像网格的极距采样间隔
其中,λ
然后,将第1级第n个子孔径对应的距离压缩回波信号后向投影到第1级第n个初始子图像网格
其中,
第二步,循环递归子孔径合并与子图像生成;
本步骤可视为第k级处理,k=2,…,K-1。第k级处理时,每l个第k-1级子孔径合并成一个第k级子孔径。对于第k级第q个子孔径,
其中,
第k级第q个子图像网格的极距采样间隔
其中,
然后,将l个第k-1级第p个子图像依次插值到第k级第q个子图像网格
其中,
第三步,全孔径合并与最终图像生成;
本步骤可视为第K级处理。第K级处理时,将l个第K-1级子孔径合并成一个第K级全孔径。首先在地面成像场景生成第K级图像网格,第K级图像网格用(x,y,0)表示,第K级图像网格的距离采样间隔Δx和方位采样间隔Δy满足下述约束条件:
其中,ρ
然后,将l个第K-1级子图像依次插值到第K级图像网格(x,y,0),并相干叠加生成第K级图像,即最终双基地低频超宽带CSAR图像:
其中,I(x,y,0)为第K级图像中网格点(x,y,0)的值,
通过仿真实验,对本发明双基地低频超宽带CSAR高效高精度成像方法进行了验证,理论分析和仿真实验结果证明了本发明的有效性。
在仿真实验中,本发明中系统参数如表1所示:
表1系统参数
本发明中成像场景目标分布如图2所示。场景设置及目标布置如下:成像场景大小为50m×50m(X方向×Y方向),在成像场景内共设置了5个点目标,并依次编号为A~E,其中点目标A位于成像场景中心,其它点目标分布在点目标A的周围,与点目标A的距离均为20m。
图3是原始BP算法获得的成像结果。其中水平方向为X轴(单位:米),垂直方向为Y轴(单位:米)。图3(a)为整个场景的成像结果,图3(b)和3(c)分别为点目标A和C的成像结果。由图3可知,成像场景中所有点目标均实现了良好的聚焦,因此原始BP算法能够实现双基地低频超宽带CSAR的高精度成像。但是,原始BP算法计算量较大,从而成像效率较低。
图4是本发明获得的成像结果。其中水平方向为X轴(单位:米),垂直方向为Y轴(单位:米)。图4(a)为整个场景的成像结果,图4(b)和4(c)分别为点目标A和C的成像结果。由图4可知,成像场景中所有点目标均实现了良好的聚焦,而且其聚焦效果与图3非常接近,因此本发明也能够实现双基地低频超宽带CSAR的高精度成像。
如表2所示,计算了点目标A和C的测量参数(分辨率和峰旁瓣比(PSLR))。从表2中可知,原始BP算法和本发明获得点目标A和C的测量参数几乎相同,达到预期的效果。因此,本发明获得点目标的聚焦性能与原始BP算法获得点目标的聚焦性能十分接近。为了证明本发明成像的高效性,在相同的仿真条件下测量了原始BP算法和本发明的运算时间,原始BP算法和本发明的运算时间分别是465.7s和46.6s。因此,本发明方法是一种双基地低频超宽带CSAR高效高精度成像方法。
表2点目标A和C的测量参数
相同或相似的标号对应相同或相似的部件;
附图中描述位置关系的用于仅用于示例性说明,不能理解为对本专利的限制;
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种双基地低频超宽带CSAR成像方法
- 双基地低频超宽带前视合成孔径雷达高效高精度成像方法