基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及航天器物理仿真领域,具体地,涉及一种基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置。
背景技术
为了保证航天器在太空中的正常运行,需要提供能源。而太阳翼作为航天器在轨状态的能源获取装置,航天器中能源的持续供应离不开太阳翼的顺利展开和正常工作。由于在外太空环境下,卫星故障维修极其困难,因此,在航天器进入太空之前,需要对太阳翼进行地面试验来验证其展开的可靠性。而太阳翼在外太空中处于零重力状态,因此在进行地面试验过程中,需要借助一系列手段进行重力补偿,以尽量模拟太阳翼的在轨状态。
对于太阳翼开展的地面模拟装置,国内外一般采用吊丝配重法、气浮法等方法进行重力补偿。吊丝配重法通过吊丝产生竖直向上的拉力,将太阳翼等设备悬吊起来。该方法易于实现,试验不受空间和时间的限制,造价不高,而且具有方便维护,对试验对象的尺寸要求不严格等优点。如专利文献CN105501472A中提及一种地面模拟太阳翼二维展开的吊挂装置,通过短导轨在长导轨上移动,实现太阳翼的二维展开,能够解决现有吊挂装置在展开试验过程中对太阳翼冲击大的问题,提高展开试验重复的稳定性,减小地面试验设备的附加阻尼。但是,这种设备机械机构通常都很复杂,存在较大的摩擦阻力,模拟精度低。
进一步地,气浮法是在光滑平台上,通过气动设备,利用气体压力产生向上的托举力补偿太阳翼等设备的重力,使之在限制的空间形成一个零重力的环境,实现空间机构测试所需求的微重力模拟以及低阻尼运动。气浮法设备的机构简单、造价低,而且装置可以在短时间内建造,同时气浮装置的承载能力强,能够达到的补偿精度也高,如专利文献CN103946569A提及一种静压气体支承结构,通过在压缩空气供给部件中间设置由圆柱形永磁铁构成的磁力产生部件,并静压气体支承结构的对应磁化部件形成磁力预紧,以适应负载变化获得稳定支承,并能够减小使用该支承件的装置的尺寸和重量。再如专利文献CN2679414Y中提及一种空气轴承吸浮块,通过低压腔的吸附作用,获得预紧效果,从而简化了轴承结构,工作更加稳定可靠。但是,但以上设计由于气浮轴承直接安装与太阳翼下端,因此在太阳翼的展开过程中很容易带来倾覆力矩的干扰,影响展开运动效果。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置。
根据本发明提供的一种基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置,包括吊架机构、吊绳组件、第一调整机构以及第二调整机构;
所述第一调整机构的上部通过磁力间隙连接所述吊架机构并能够在外力的驱使下沿第一方向运动,所述第一调整机构的下部通过能够沿第二方向运动的第二调整机构连接所述吊绳组件的上端,所述吊绳组件的下端分别用于悬挂第一太阳翼、第二太阳翼;
所述第一方向垂直于第二方向;
所述第一太阳翼可转动的连接所述第二太阳翼;
所述第一调整机构能够驱使所述吊绳组件运动进而能够使第一太阳翼和第二太阳翼在展开状态和折叠状态之间切换。
优选地,所述吊绳组件包括第一吊绳以及第二吊绳;
所述第一吊绳、第二吊绳的上端分别连接所述第二调整机构,所述第一吊绳、第二吊绳的下端分别连接所述第一太阳翼、第二太阳翼。
优选地,所述第一调整机构通过自身所具有的气路通道能够实现与所述吊架机构气浮间隙连接并通过自身所设置的第一磁体组件和/或铁磁组件与所述吊架机构上所具有的第二磁体组件实现磁力连接。
优选地,所述第一磁体组件采用永磁体或电磁体,所述铁磁组件采用铁磁体。
优选地,所述第二磁体组件采用电磁体,或者采用电磁体和永磁体。
优选地,所述吊架机构包括滑轨件,所述第一调整机构上设置有滑块件;
所述滑块件上设置有滑槽以及气路通道且所述气路通道延伸到所述滑槽的底部以及两侧,所述滑轨件的端部延伸到所述滑槽的内部并与所述滑块件间隙连接。
优选地,所述滑轨件上设置有第一永磁体、第一电磁体以及第二电磁体,所述滑块件上设置有第二永磁体、第一铁磁块以及第二铁磁块,其中:
所述第一永磁体正对所述第二永磁体布置且磁性相吸,所述第一电磁体、第二电磁体分别正对所述第一铁磁块、第二铁磁块布置。
优选地,所述气路通道包括第一供气通道、第二供气通道以及第三供气通道,其中,所述第一供气通道、第二供气通道分别连接所述滑槽的两侧,所述第三供气通道连接所述滑槽的底部。
优选地,所述吊架机构包括第一吊架以及第二吊架;
所述第一调整机构包括第一长行程滑块、第二长行程滑块、第三长行程滑块、第四长行程滑块、第一横梁以及第二横梁;
所述第一横梁上部的两端分别连接所述第一长行程滑块、第二长行程滑块的下部,所述第二横梁上部的两端分别连接所述第三长行程滑块、第四长行程滑块的下部,所述第一长行程滑块、第二长行程滑块的上部分别可运动的设置在第一吊架、第二吊架的一端,所述第三长行程滑块、第四长行程滑块的上部分别可运动的设置在第一吊架、第二吊架的另一端;
所述第一横梁、第二横梁的下部分别与所述第二调整机构滑动配合。
优选地,所述第二调整机构包括第一短行程滑块以及第二短行程滑块;
所述第一短行程滑块的上端与所述第一横梁滑动配合,所述第二短行程滑块的上端与所述第二横梁滑动配合;
所述第一短行程滑块、第二短行程滑块的下端分别连接所述吊绳组件。
与现有技术相比,本发明具有如下的有益效果:
1、本发明通过非接触气磁复合实现太阳翼吊挂式气浮展开运动装置的高精度环境模拟,供气气体通过第三供气通道,进入第一长行程滑块相对第一吊架在竖直方向的运动间隙,提供第一长行程滑块相对第一吊架竖直向下的气浮推力,第一电磁铁与第一铁磁块,第二电磁铁与第二铁磁块通过磁力作用,提供第一长行程滑块相对第一吊架竖直向上的吸力,第一电磁铁与第一铁磁块,第二电磁铁与第二铁磁块,通过电磁力作用,提供适应吊挂重物变化时的推力或者吸力,通过气浮推力、永磁吸力以及电磁推力或者吸力的非接触力配合,实现太阳翼的吊挂展开测试,具有无摩擦、高精度运动控制等优点。
2、本发明中的气浮装置通过永磁预紧以及电磁调节预紧复合形式实现高稳定工作特点,第一电磁铁与第一铁磁块,第二电磁铁与第二铁磁块通过磁力作用,提供第一长行程滑块相对第一吊架竖直向上的吸力,第一电磁铁与第一铁磁块,第二电磁铁与第二铁磁块,通过电磁力作用,提供适应吊挂重物变化时的推力或者吸力,从而可保证气浮装置中的气浮装置始终工作在最佳工作状态,从而保证了气浮装置的高稳定性。
3、本发明中的气路通道能够根据实际的应用场景采取多种结构形式,实用性强。
4、本发明均采用常规的结构部件制作,具有结构简单、成本低的特点。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
图1本发明总体结构示意图;
图2本发明总体结构左视示意图;
图3本发明第一长行程导轨剖视示意图。
图中示出:
第二吊绳5 第一横梁301
第二太阳翼6 第二横梁302
第一太阳翼8 第一短行程滑块401
第一吊绳9 第二短行程滑块402
第三供气通道13 第一关节铰链701
第二永磁体14 第二关节铰链702
第一永磁体15 第一电磁体1001
第三长行程滑块16 第二电磁体1002
第四长行程滑块17 第一铁磁块1101
第一吊架101 第二铁磁块1102
第二吊架102 第一供气通道1201
第一长行程滑块201 第二供气通道1202
第二长行程滑块202
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
实施例1:
本发明提供了一种基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置,包括吊架机构、吊绳组件、第一调整机构以及第二调整机构,所述第一调整机构的上部通过磁力间隙连接所述吊架机构并能够在外力的驱使下沿第一方向运动,所述第一调整机构的下部通过能够沿第二方向运动的第二调整机构连接所述吊绳组件的上端,所述吊绳组件的下端分别用于悬挂第一太阳翼8、第二太阳翼6,所述第一方向垂直于第二方向,所述第一太阳翼8可转动的连接所述第二太阳翼6,所述第一太阳翼8优选采用铰接的方式连接所述第二太阳翼6,其中,在外力的驱使下所述第一调整机构运动并能够驱使所述吊绳组件运动进而能够使第一太阳翼8和第二太阳翼6在展开状态和折叠状态之间切换。
进一步地,所述第一调整机构通过自身所具有的气路通道能够实现与所述吊架机构气浮间隙连接并通过自身所设置的第一磁体组件和/或铁磁组件与所述吊架机构上所具有的第二磁体组件实现磁力连接,所述第一磁体组件采用永磁体或电磁体,所述电磁体优选电磁线圈,所述永磁体例如采用磁铁,所述铁磁组件采用铁磁体,铁磁体为能够被磁体吸引的结构体,所述第二磁体组件采用电磁体,或者采用电磁体和永磁体。
更进一步地,所述的磁力连接既可以包括永磁体与永磁体之间、永磁体与铁磁体之间被动的磁力吸引,又可以包括通过通电的电磁线圈实现与永磁体或与铁磁体之间可控磁力的吸引,使装置能够在可控主动磁力、被动磁力、各组件重力以及气浮力的共同作用下使吊架机构与第一调整机构之间形成稳定的气浮非接触磁力连接。
具体地,所述吊架机构包括滑轨件,所述第一调整机构上设置有滑块件。所述滑块件上设置有滑槽以及气路通道且所述气路通道延伸到所述滑槽的底部与两侧,所述滑轨件的端部延伸到所述滑槽的内部并与所述滑块件间隙连接。其中,所述气路通道能够采用小孔节流结构、环形孔节流结构或者多孔质节流结构,具体应根据实际的应用场景灵活选择,以满足实际产品的需求。
实施例2:
本实施例为实施例1的优选例。
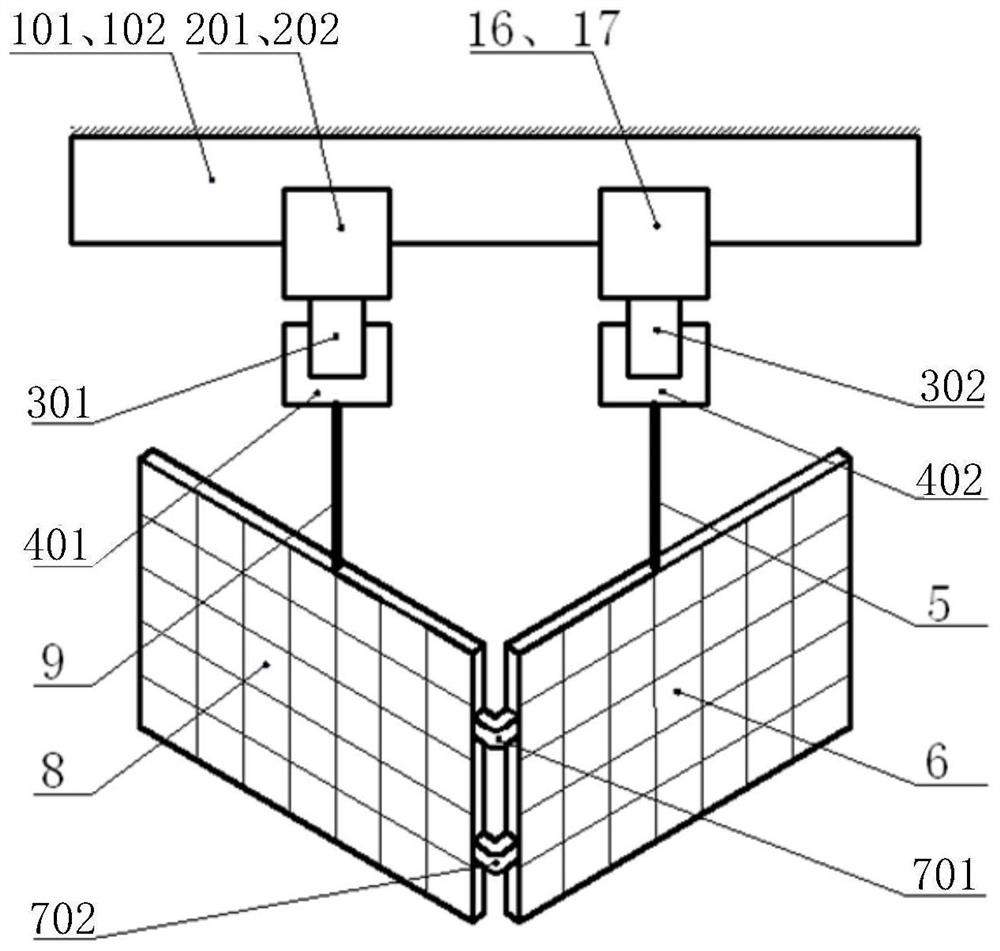
本实施例中,如图1、图2所示,所述吊架机构包括第一吊架101以及第二吊架102,所述第一调整机构包括第一长行程滑块201、第二长行程滑块202、第三长行程滑块16、第四长行程滑块17、第一横梁301以及第二横梁302,其中,第一长行程滑块201、第二长行程滑块202、第三长行程滑块16、第四长行程滑块17、第一横梁301以及第二横梁302的横截面均采用凹字形结构,所述第一横梁301上部的两端分别连接所述第一长行程滑块201、第二长行程滑块202的下部,所述第二横梁302上部的两端分别连接所述第三长行程滑块16、第四长行程滑块17的下部,所述第一长行程滑块201、第二长行程滑块202的上部分别可运动的设置在第一吊架101、第二吊架102的一端,所述第三长行程滑块16、第四长行程滑块17的上部分别可运动的设置在第一吊架101、第二吊架102的另一端,所述第一横梁301、第二横梁302的下部分别与所述第二调整机构滑动配合。
具体地,如图1、图2所示,所述第二调整机构包括第一短行程滑块401以及第二短行程滑块402,所述第一短行程滑块401的上端与所述第一横梁301滑动配合,所述第二短行程滑块402的上端与所述第二横梁302滑动配合,所述第一短行程滑块401、第二短行程滑块402的下端分别连接所述吊绳组件。
进一步地,所述吊绳组件包括第一吊绳9以及第二吊绳5,所述第一吊绳9、第二吊绳5的上端分别连接所述第一短行程滑块401、第二短行程滑块402的下端,所述第一吊绳9、第二吊绳5的下端分别连接所述第一太阳翼8、第二太阳翼6。
需要说明的是,本实施例中的滑轨件包括第一吊架101、第二吊架102,滑块件包括第一长行程滑块201、第二长行程滑块202、第三长行程滑块16、第四长行程滑块17,本实施例中所述的长行程与短行程是相对的两个概念,长行程对应部件能够运动的位移大于短行程对应部件能够运动的位移。
如图1、图2、图3所示,第二磁体组件包括第一永磁体15、第一电磁体1001以及第二电磁体1002且均设置在所述滑轨件上,铁磁组件包括第一铁磁块1101以及第二铁磁块1102,第一磁体组件包括第二永磁体14,所述第二永磁体14设置在滑块件上,其中,所述第一永磁体15正对所述第二永磁体14布置且磁性相吸,所述第一电磁体1001、第二电磁体1002分别正对所述第一铁磁块1101、第二铁磁块1102布置。
具体地,如图3所示,所述气路通道包括第一供气通道1201、第二供气通道1202以及第三供气通道13,其中,所述第一供气通道1201、第二供气通道1202分别连接所述滑槽的两侧,所述第三供气通道13连接所述滑槽的底部。
本发明的工作原理如下:
如图1、图2所示,第一长行程滑块201可沿第一吊架101滑动并组成第一长行程导轨,第二长行程滑块202可沿第二吊架102滑动并组成第二长行程导轨,第一横梁301两端分别固连于第一长行程滑块201、第二长行程滑块202上,第一短行程滑块401可沿第一横梁301滑动,在第一短行程滑块401竖直下端设置第一吊绳9,第一吊绳9的另一端固连于第一太阳翼8,第一太阳翼8通过第一短行程滑块401与第一长行程滑块201和第二长行程滑块202的运动,实现二维运动;第三长行程滑块16可沿第一吊架101滑动并组成第三长行程导轨,第四长行程滑块17可沿第二吊架102滑动并组成第四长行程导轨,第二横梁302两端分别固连于第三长行程滑块16、第四长行程滑块17上,第二短行程滑块402可沿第二横梁302滑动,在第二短行程滑块402竖直下端设置第二吊绳5,第二吊绳5的另一端固连于第二太阳翼6,第二太阳翼6通过第二短行程滑块402与第三长行程滑块16和第四长行程滑块17的运动,实现二维运动;第一太阳翼8和第二太阳翼6通过第一关节铰链701和第二关节铰链702实现相对转动运动。
现以第一长行程滑块201可沿第一吊架101滑动组成的第一长行程导轨为例介绍本发明磁气悬浮的工作原理:
如图3所示,在第一吊架101对应第一长行程滑块201的竖直方向下侧,设置第一永磁铁15、第一电磁铁1001和第二电磁铁1002,在第一长行程滑块201对应第一吊架101的竖直方向上侧,设置第二永磁铁14,第一铁磁块1101和第二铁磁块1102,第一永磁铁15与第二永磁铁14对应布置,第一电磁铁1001与第一铁磁块1101对应布置,第二电磁铁1002与第二铁磁块1102对应布置;在第一长行程滑块201对应第一吊架101的水平方向内侧设置第一供气通道1201和第二供气通道1202,通过压缩空气获得第一长行程滑块201相对第一吊架101在水平方向的非接触气悬浮运动约束;在第一长行程滑块201对应第一吊架101的竖直方向内侧设置第三供气通道13,通过压缩空气获得第一长行程滑块201相对第一吊架101在竖直方向的非接触气悬浮运动约束。
进一步地,供气气体通过第三供气通道13,进入第一长行程滑块201相对第一吊架101在竖直方向的运动间隙,提供第一长行程滑块201相对第一吊架101竖直向下的气浮推力,第一电磁铁1001与第一铁磁块1101,第二电磁铁1002与第二铁磁块1102通过磁力作用,提供第一长行程滑块201相对第一吊架101竖直向上的吸力且通过控制第一电磁铁1001、第二电磁铁1002的通电电流可控制磁场大小进而控制磁吸力的大小最终实现气悬浮的稳定状态,在太阳翼测试过程中,第一长行程滑块201相对第一吊架101竖直向上的吸力,等于气浮推力与吊挂重物的总和;第一电磁铁1001与第一铁磁块1101,第二电磁铁1002与第二铁磁块1102,通过电磁力作用,提供适应吊挂重物变化时的推力或者吸力,并保持第一长行程滑块201与第一吊架101在竖直方向的相对位置。
压缩空气可通过第一供气通道1201、第二供气通道1202和第三供气通道13,对第一长行程滑块201与第一吊架101之间的对应面同时供气,也可以采用分别单独供气方式。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置
- 一种太阳翼板二维全气浮展开吊挂装置