轨道车辆的制动实训系统、制动实训控制柜
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及轨道车辆教学设备技术领域,具体而言,涉及一种轨道车辆的制动实训系统、制动实训控制柜。
背景技术
随着我国城市轨道车辆建设的发展,为保障轨道车辆的可靠运行,需要定期对轨道车辆进行检修。
为培养对轨道车辆进行检修的专业人才,现有的培养主要是以书本理论、教学视频及实践为主。
以书本理论和教学视频进行轨道车辆的制动原理讲解,学员无法充分了解轨道车辆的制动原理,且以轨道车辆的真实故障进行实践的实践性不足,使得学员无法全面了解轨道车辆可能发生的故障类型,从而无法全面掌握轨道车辆的故障检修方法。
发明内容
本发明的目的在于,针对上述现有技术中的不足,提供一种轨道车辆的制动实训系统、制动实训控制柜,以便更好地向学员展示轨道车辆的组成、制动原理及制动过程,提高实训教学效果。
为实现上述目的,本申请实施例采用的技术方案如下:
第一方面,本申请实施例提供了一种轨道车辆的制动实训系统,包括:电气控制柜、网关阀、制动风缸、走行单元、智能阀、风缸模型;
其中,所述电气控制柜的第一控制输出端通信连接所述网关阀的控制端,以使得所述网关阀基于接收到的第一制动控制指令,控制气路导通;所述网关阀的气路输入端与所述制动风缸的气路输出端气路连接,所述网关阀的气路输出端与所述走行单元的第一气路控制端气路连接,以使得所述制动风缸输出的制动空气输出至所述走行单元的第一气路控制端,实现对所述走行单元的制动控制;
所述网关阀的通信端与所述智能阀的通信端连接,以将所述第一制动控制指令传输至所述智能阀,所述智能阀的气路输入端与所述制动风缸的气路输出端气路连接,所述智能阀的气路输出端与所述风缸模型的气路输入端气路连接,以使得所述制动风缸输出的制动空气输出至所述风缸模型,实现对另一走行单元的制动模拟控制。
可选的,所述制动实训系统还包括:辅助制动控制装置和总风缸;
其中,所述电气控制柜的第二控制输出端通信连接所述辅助制动控制装置的控制端,以使得所述辅助制动控制装置基于接收到的第二制动控制指令,控制气路导通;
所述辅助制动控制装置的气路输入端与所述总风缸的气路输出端气路连接,所述辅助制动控制装置的气路输出端与所述走行单元的第二气路控制端气路连接,以使得所述总风缸输出的制动空气输出至所述走行单元的第二气路控制端,实现对所述走行单元的制动控制。
可选的,所述第一气路控制端包括:所述走行单元中带停放制动装置的基础制动单元的一个控制端,和不带停放制动装置的基础制动单元的控制端;
所述第二气路控制端为:所述带停放制动装置的基础制动单元的另一个控制端。
可选的,所述制动实训系统还包括:第一制动隔离阀和第二制动隔离阀;
所述第一制动隔离阀设置在所述制动风缸的气路输出端和所述网关阀的气路输入端之间;所述第一制动隔离阀的状态端通信连接所述电气控制柜的第一输入端;
所述第二制动隔离阀设置在所述制动风缸的气路输出端和所述智能阀的气路输入端之间;所述第二制动隔离阀的状态端通信连接所述电气控制柜的第二输入端。
可选的,所述制动实训系统还包括:第一调压阀;
所述第一调压阀设置在所述制动风缸的气路输出端和所述第一制动隔离阀之间;所述第一调压阀的控制端通信连接所述电气控制柜的第三控制输出端。
可选的,所述制动实训系统还包括:第二调压阀;
所述第二调压阀设置在所述制动风缸的气路输出端和所述第二制动隔离阀之间;所述第二调压阀的控制端通信连接所述电气控制柜的第四控制输出端。
可选的,所述制动实训系统还包括:两组空簧压力风缸、空簧总风缸;
每组空簧压力风缸的气路输入端连接所述空簧总风缸的气路输出端,一组所述空簧压力风缸的气路输出端与所述网关阀的缓冲输入端气路连接,另一组所述空簧压力风缸的气路输出端与所述智能阀的缓冲输入端气路连接。
可选的,所述制动实训系统还包括:第一换向阀和第二换向阀;
所述第一换向阀设置在所述网关阀的缓冲输入端和一组所述空簧压力风缸的气路输出端之间;所述第一换向阀的控制端通信连接所述电气控制柜的第五控制输出端;
所述第二换向阀设置在所述智能阀的缓冲输入端和另一组所述空簧压力风缸的气路输出端之间;所述第二换向阀的控制端通信连接所述电气控制柜的第六控制输出端。
可选的,所述制动实训系统还包括:第一电动球阀和第二电动球阀;
所述第一电动球阀设置在所述总风缸的气路输出端和所述每组空簧压力风缸的气路输入端之间;所述第一电动球阀的控制端通信连接所述电气控制柜的第七控制输出端;
所述第二电动球阀设置在所述空簧总风缸的气路输出端和所述每组空簧压力风缸的气路输入端之间;所述第二电动球阀的控制端通信连接所述电气控制柜的第七控制输出端。
第二方面,本申请实施例还提供一种轨道车辆的制动实训控制柜,所述制动实训控制柜包括:构架和上述实施例任一所述的制动实训系统;所述制动系统系统固定安装在所述构架上。
本申请的有益效果是:
本申请提供了一种轨道车辆的制动实训系统、制动实训控制柜,其中,制动实训系统包括:电气控制柜、网关阀、制动风缸、走行单元、智能阀、风缸模型;其中,电气控制柜的第一控制输出端通信连接网关阀的控制端,以使得网关阀基于接收到的第一制动控制指令,控制气路导通;网关阀的气路输入端与制动风缸的气路输出端气路连接,网关阀的气路输出端与走行单元的第一气路控制端气路连接,以使得制动风缸输出的制动空气输出至走行单元的第一气路控制端,实现对走行单元的制动控制;网关阀的通信端与智能阀的通信端连接,以将第一制动控制指令传输至智能阀,智能阀的气路输入端与制动风缸的气路输出端气路连接,智能阀的气路输出端与风缸模型的气路输入端气路连接,以使得制动风缸输出的制动空气输出至风缸模型,实现对另一走行单元的制动模拟控制。通过本申请提供的方案,可以更好地向学员展示轨道车辆的组成、制动原理及制动过程,提高实训教学效果。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本申请实施例提供的一种轨道车辆的制动实训系统的电路结构示意图;
图2为本申请实施例提供的第一种轨道车辆的制动实训系统的气路结构示意图;
图3为本申请实施例提供的第二种轨道车辆的制动实训系统的气路结构示意图;
图4为本申请实施例提供的第三种轨道车辆的制动实训系统的气路结构示意图;
图5为本申请实施例提供的第四种轨道车辆的制动实训系统的气路结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
因此,以下对在附图中提供的本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本申请的描述中,需要说明的是,若出现术语“上”、“下”、等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
此外,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
需要说明的是,在不冲突的情况下,本申请的实施例中的特征可以相互结合。
本申请实施例提供的轨道车辆的制动实训系统和制动实训控制柜,是专门针对地铁车辆的制动实训系统和制动实训控制柜。
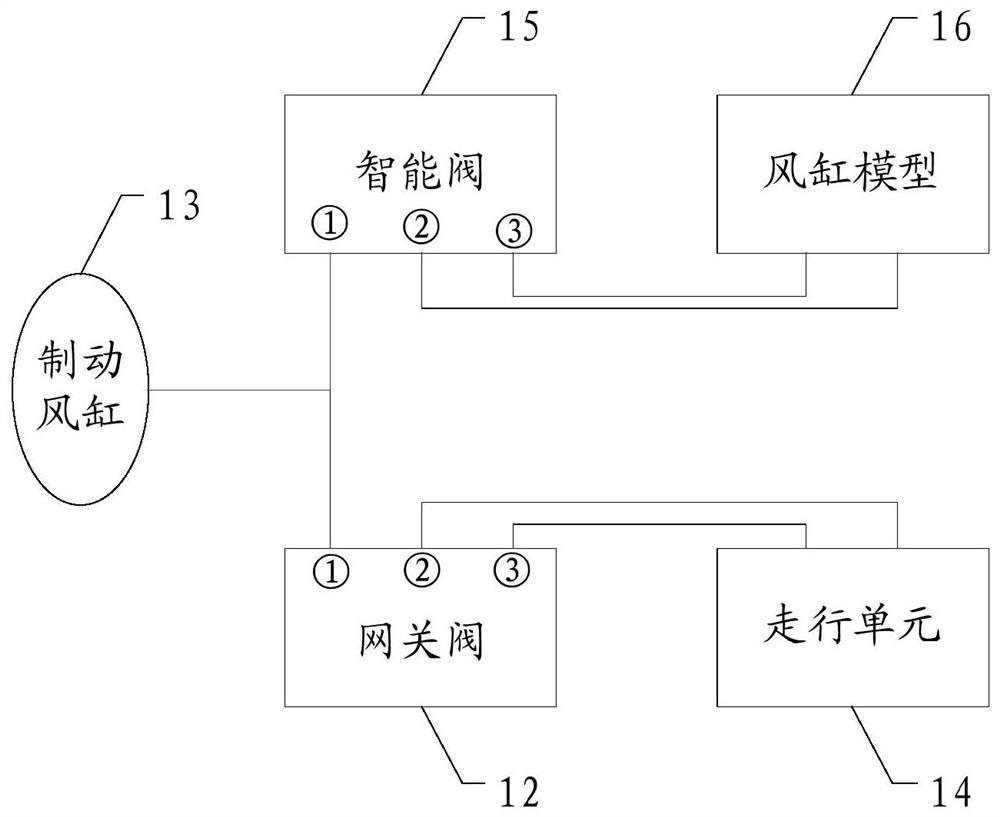
图1为本申请实施例提供的一种轨道车辆的制动实训系统的电路结构示意图,图2为本申请实施例提供的第一种轨道车辆的制动实训系统的气路结构示意图,如图1和图2所示,该制动实训系统包括:电气控制柜11、网关阀12、制动风缸13、走行单元14、智能阀15、风缸模型16。
其中,电气控制柜11的第一控制输出端X1通信连接网关阀12的控制端,以使得网关阀12基于接收到的第一制动控制指令,控制气路导通;网关阀12的气路输入端与制动风缸13的气路输出端气路连接,网关阀12的气路输出端与走行单元14的第一气路控制端气路连接,以使得制动风缸13输出的制动空气输出至走行单元14的第一气路控制端,实现对走行单元14的制动控制。
网关阀12的通信端与智能阀15的通信端连接,以将第一制动控制指令传输至智能阀15,智能阀15的气路输入端与制动风缸13的气路输出端气路连接,智能阀15的气路输出端与风缸模型16的气路输入端气路连接,以使得制动风缸13输出的制动空气输出至风缸模型16,实现对另一走行单元的制动模拟控制。
具体的,制动实训系统包括电路连接部分和气路连接,电路连接部分包括:电气控制柜11的第一控制输出端X1和网关阀12之间的通信连接,网关阀12的通信端和智能阀15的通信端之间通过CAN(Controller Area Network,控制器局域网络)总线通信连接,电气控制柜11通过第一控制输出端X1向网关阀12发送第一制动控制指令,网关阀12将第一制动控制指令转发给智能阀15。第一制动控制指令包括但不限于:紧急制动指令、牵引指令、制动指令、紧急牵引制动、远程缓解指令、回送制动指令。
其中,电气控制柜11可以为可编程逻辑控制器(Programmable LogicController,PLC),电气控制柜11与制动实训操作台连接,由制动实训操作台向电气控制柜11发送控制信号,电气控制柜11根据接收到的控制信号进行逻辑处理得到第一制动控制指令。
需要说明的是,智能阀15也可以和电气控制柜11通过CAN总线通信连接,以接收第一制动控制指令,但智能阀15所接收的第一制动控制指令只能为紧急制动指令和远程缓解指令。
气路连接部分包括:制动风缸13的气路输出端—网关阀12的气路输入端(图2所示的网关阀的①接口)—网关阀12的气路输出端(图2所示的网关阀的②接口和③接口)—走行单元14的第一气路控制端,和,制动风缸13的气路输出端—智能阀15的气路输入端(图2所示的智能阀的①接口)—智能阀12的气路输出端(图2所示的智能阀的②接口和③接口)—风缸模型16的气路输入端。
由于轨道车辆的制动实训系统是对真实的轨道车辆的制动系统的仿真,为节约成本,并尽可能真实的模拟轨道车辆的制动系统,因此,针对轨道车辆的制动系统中的两个转向架,且由于转向架为两个轮对构成的H型结构,则在本申请实施例提供的轨道车辆的制动实训系统中,由真实的两个车轮组成的轮对作为一个走行单元模拟一个转向架,而另一个转向架对应的另一个走行单元则由风缸模型16代替,根据风缸模型16的压力值模拟转向架的状态。
其中,轮对可采用合金钢镂空设计,与真实的轨道车辆的转向架的形状保持一致的同时,减轻重量,降低危险性。
本申请实施例提供的轨道车辆的制动实训系统的制动原理为:
电气控制柜11向网关阀12发送第一制动控制指令,网关阀12根据第一制动控制指令进行计算,得到进行制动所需要的制动气压值,由制动风缸13向网关阀12的①接口输入该制动气压值的制动空气,并由网关阀12的②接口和③接口输出至走行单元14的第一气路控制端,调节走行单元14的制动气压,以实现对走行单元14的制动控制。
同时,网关阀12将第一制动控制指令通过CAN总线转发给智能阀15,智能阀15根据第一制动控制指令进行计算,得到进行制动所需要的制动气压值,由制动风缸13向智能阀15的①接口输入该制动气压值的制动空气,并由智能阀15的②接口和③接口输出至风缸模型16,调节风缸模型16的气压,风缸模型16上安装有压力表,由压力表对风缸模型16的气压值进行检测,根据压力表显示的气压值判断风缸模型16的压力值是否达到制动气压值,若达到,则表示风缸模型16实现了对另一走行单元的制动模拟控制。
需要说明的是,不同的第一制动控制指令在进行制动时所需要的制动气压值不同,例如,若电气控制柜11发送的第一制动控制指令为紧急制动指令时,为保证轨道车辆快速刹车停止运行,网关阀12和智能阀15经过计算得到的制动气压值较大;若电气控制柜11发送的第一制动控制指令为制动指令,即控制轨道车辆在运行过程中进行刹车,网关阀12和智能阀15经过计算得到的制动气压值较小。
本申请实施例提供的轨道车辆的制动实训系统,包括:电气控制柜、网关阀、制动风缸、走行单元、智能阀、风缸模型;其中,电气控制柜的第一控制输出端通信连接网关阀的控制端,以使得网关阀基于接收到的第一制动控制指令,控制气路导通;网关阀的气路输入端与制动风缸的气路输出端气路连接,网关阀的气路输出端与走行单元的第一气路控制端气路连接,以使得制动风缸输出的制动空气输出至走行单元的第一气路控制端,实现对走行单元的制动控制;网关阀的通信端与智能阀的通信端连接,以将第一制动控制指令传输至智能阀,智能阀的气路输入端与制动风缸的气路输出端气路连接,智能阀的气路输出端与风缸模型的气路输入端气路连接,以使得制动风缸输出的制动空气输出至风缸模型,实现对另一走行单元的制动模拟控制。通过本申请实施例提供的方案,可以更好地向学员展示轨道车辆的组成、制动原理及制动过程,提高实训教学效果,同时以风缸模型代替走形单元,可以节约制动实现系统的成本。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,图3为本申请实施例提供的第二种轨道车辆的制动实训系统的气路结构示意图,如图1和图3所示,该制动实训系统还包括:辅助制动控制装置17和总风缸18。
其中,电气控制柜11的第二控制输出端X2通信连接辅助制动控制装置17的控制端,以使得辅助制动控制装置17基于接收到的第二制动控制指令,控制气路导通。
辅助制动控制装置17的气路输入端与总风缸18的气路输出端气路连接,辅助制动控制装置17的气路输出端与走行单元14的第二气路控制端气路连接,以使得总风缸18输出的制动空气输出至走行单元14的第二气路控制端,实现对走行单元14的制动控制。
具体的,如图1所示,制动实训系统的电路连接部分还包括:电气控制柜11的第二控制输出端X2通信连接辅助制动控制装置17的控制端,以向辅助制动控制装置17发送第二制动控制指令。第二制动控制指令包括:停放制动施加指令、缓解停放制动指令。其中,停放制动施加指令用于在轨道车辆处于停止状态时,施加在走行单元14上保证列车在坡道上不溜车,保证列车的停放安全,并由缓解停放制动指令进行停放制动的解除。
如图3所示,气路连接部分还包括:总风缸18的气路输出端—辅助制动控制装置17的气路输入端(图3所示的辅助制动控制装置的①接口)—辅助制动控制装置17的气路输出端(图3所示的辅助制动控制装置的⑥接口)—走行单元14的第二气路控制端。
本申请实施例提供的轨道车辆的制动实训系统的制动原理为:
一、当电气控制柜11向辅助制动控制装置17发送的第二制动控制指令为停放制动施加指令时,辅助制动控制装置17控制⑥接口出的脉冲电磁阀打开,走行单元14的第二气路控制端经由⑥接口排气使得走行单元14被挤压,实现停放制动。
二、当电气控制柜11向辅助制动控制装置17发送的第二制动控制指令为缓解停放制动指令时,辅助制动控制装置17的⑥接口向走行单元14的第二气路控制端充气,使得走行单元14不再被挤压,实现停放制动取消。
在一种可选实施方式中,辅助制动控制装置17的气路输出端还与网关阀12的气路采集端气路连接,以使得网关阀12的气路采集端的气压值与辅助制动控制装置17的气路输出端的气压值保持一致。
具体的,当轨道车辆处于停放制动施加状态时,轨道车辆无法运行,辅助制动控制装置17的⑥接口还连接网关阀12的气路采集端(图3所示的网关阀的⑥接口),以使得网关阀12的⑥接口和辅助制动控制装置17的⑥接口的气压值一致,网关阀12根据⑥接口的气压值判断辅助制动控制装置17的⑥接口处于排气状态,此时若网关阀12接收到电气控制柜11发送的牵引指令,则无法控制走行单元14对轨道车辆进行牵引,使得轨道车辆无法运行。
在另一种可选实施方式中,辅助制动控制装置17的气路采集端还与网关阀12的气路输出端气路连接,以使得辅助制动控制装置17的气路采集端的气压值与网关阀12的气路输出端的气压值保持一致。
具体的,当轨道车辆处于运行状态时,轨道车辆无法实现停放制动,辅助制动控制装置17的气路输出端(图3所示的辅助制动控制装置的⑤接口)连接网关阀12的②接口或③接口,以使得辅助制动控制装置17的⑤接口和网关阀的②接口或③接口的气压值一致,辅助制动控制装置17根据⑤接口的气压值判断走行单元14处于运行状态,此时若辅助制动控制装置17接收到电气控制柜11发送的停放制动施加指令,则无法对轨道车辆进行停放制动施加。
需要说明的是,总风缸18的气路输出端还通过辅助制动控制装置17的气路输入端、辅助制动控制装置17的气路传输端(图3所示的辅助制动控制装置的②接口)与制动风缸13的气路输入端气路连接,以使得总风缸18为制动风缸13充气。而总风缸18的气路输入端则连接空气压缩机,以使得空气压缩机为总风缸18充气。
本申请实施例提供的轨道车辆的制动实训系统,还包括辅助制动控制装置和总风缸,其中,电气控制柜的第二控制输出端通信连接辅助制动控制装置的控制端,以使得辅助制动控制装置基于接收到的第二制动控制指令,控制气路导通;辅助制动控制装置的气路输入端与总风缸的气路输出端气路连接,辅助制动控制装置的气路输出端与走行单元的第二气路控制端气路连接,以使得总风缸输出的制动空气输出至走行单元的第二气路控制端,实现对走行单元的制动控制。通过本申请实施例提供的制动实训系统,可实现针对停放制动施加和缓解停放制动的原理展示,以便学员更好的了解停放制动施加和缓解停放制动的原理,提高实训教学效果。
在一种可选实施方式中,如图3所示,走行单元14包括:一个带停放制动装置的基础制动单元141和一个不带停放制动装置的基础制动单元142。第一气路控制端包括:走行单元14中带停放制动装置的基础制动单元141的一个控制端,和不带停放制动装置的基础制动单元142的控制端;第二气路控制端包括:带停放制动装置的基础制动单元141的另一个控制端。
具体的,当网关阀12接收到电气控制柜11发送的第一控制指令时,通过带停放制动装置的基础制动单元的一个控制端,和不带停放制动装置的基础制动单元的控制端,实现对走行单元的制动控制;当辅助制动控制装置17接收到电气控制柜11发送的第二控制指令时,通过带停放制动装置的基础制动单元的另一个控制端,实现对走行单元的制动控制。示例的,基础制动单元可采用踏面制动式单元。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,图4为本申请实施例提供的第三种轨道车辆的制动实训系统的气路结构示意图,如图1和图4所示,制动实训系统还包括:第一制动隔离阀19和第二制动隔离阀20。
第一制动隔离阀19设置在制动风缸13的气路输出端和网关阀12的气路输入端之间;第一制动隔离阀19的状态端通信连接电气控制柜11的第一输入端。
第二制动隔离阀20设置在制动风缸13的气路输出端和智能阀15的气路输入端之间;第二制动隔离阀20的状态端通信连接电气控制柜11的第二输入端。
具体的,如图1所示,制动实训系统的电路连接部分还包括:电气控制柜11的第一输入端通信连接第一制动隔离阀19的状态端,以采集第一制动隔离阀19的开关状态;电气控制柜11的第二输入端通信连接第二制动隔离阀20的状态端,以采集第二制动隔离阀20的开关状态。
气路连接部分包括:由第一制动隔离阀19的开关状态决定网关阀12的气路输入端和制动风缸13的气路输出端之间的气路通断;由第二制动隔离阀20的开关状态决定智能阀15的气路输入端和制动风缸13的气路输出端之间的气路通断。
以第一制动隔离阀为例,本申请实施例提供的轨道车辆的制动实训系统的工作原理为:
通过手动调节第一制动隔离阀19的开关状态,并将第一制动隔离阀19的开关状态反馈至电气控制柜11,当电气控制柜11检测到第一制动隔离阀19的开关状态的关闭时发出提示,以模拟网关阀12与制动风缸13之间的气路断开故障。
在一种可选实施方式中,电气控制柜11将第一制动隔离阀19的开关状态反馈至制动实训操作台,以在制动实训操作台上显示第一制动隔离阀19的开关状态。
本申请实施例提供的轨道车辆的制动实训系统,还包括第一制动隔离阀和第二制动隔离阀,第一制动隔离阀设置在制动风缸的气路输出端和网关阀的气路输入端之间;第一制动隔离阀的状态端通信连接电气控制柜的第一输入端;第二制动隔离阀设置在制动风缸的气路输出端和智能阀的气路输入端之间;第二制动隔离阀的状态端通信连接电气控制柜的第二输入端。通过本申请实施例提供的系统,可通过第一制动隔离阀和第二制动隔离阀模拟制动风缸与网关阀和智能阀之间的气路断开故障,还可以由电气控制柜检测该故障并进行故障提醒,便于学员掌握气路断开故障,提高实训教学效果。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,如图1和图4所示,制动实训系统还包括:第一调压阀21和第二调压阀22。
第一调压阀21设置在制动风缸13的气路输出端和第一制动隔离阀19之间;第一调压阀21的控制端通信连接电气控制柜11的第三控制输出端X3。
第二调压阀22设置在制动风缸13的气路输出端和第二制动隔离阀20之间;第二调压阀22的控制端通信连接电气控制柜11的第四控制输出端X4。
具体的,如图1所示,制动实训系统的电路连接部分还包括:电气控制柜11的第三控制输出端X3通信连接第一调压阀21的控制端,以向第一调压阀21发送第一调压故障指令;电气控制柜11的第四控制输出端X4通信连接第二调压阀22的控制端,以向第二调压阀22发送第二调压故障指令。
气路连接部分包括:由第一调压阀21调节制动风缸13向网关阀12输出的制动气压的制动气压值,由第二调压阀22调节制动风缸13向智能阀15输出的制动气压的制动气压值。
以第一调压阀21为例,本申请实施例提供的轨道车辆的制动实训系统的工作原理为:
电气控制柜11向第一调压阀21发送第一调压故障指令,第一调压故障指令用于使得制动风缸13向网关阀12输出的制动气压的制动气压值小于网关阀12根据第一制动控制指令计算得到的制动气压值,使得网关阀12无法控制走行单元14进行正常的制动,以模拟由于制动气压不足引起的制动故障。
本申请实施例提供的轨道车辆的制动实训系统,还包括:第一调压阀和第二调压阀;第一调压阀设置在制动风缸的气路输出端和第一制动隔离阀之间;第一调压阀的控制端通信连接电气控制柜的第三控制输出端;第二调压阀设置在制动风缸的气路输出端和第二制动隔离阀之间;第二调压阀的控制端通信连接电气控制柜的第四控制输出端。通过本申请实施例提供的方案,可以通过第一调压阀和第二调压阀调节制动气压,以模拟由于制动气压不足引起的制动故障,便于学员掌握制动故障,提高实训教学效果。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,图5为本申请实施例提供的第四种轨道车辆的制动实训系统的气路结构示意图,如图5所示,该制动实训系统还包括:两组空簧压力风缸23、空簧总风缸24。
每组空簧压力风缸23的气路输入端连接空簧总风缸24的气路输出端,一组空簧压力风缸23的气路输出端与网关阀12的缓冲输入端气路连接,另一组空簧压力风缸23的气路输出端与智能阀15的缓冲输入端气路连接。
具体的,如图5所示,制动实训系统的气路连接部分还包括:空簧总风缸24的气路输出端—一组空簧压力风缸23的气路输入端—一组空簧压力风缸23的气路输出端—网关阀12的缓冲输入端(如图5所示的网关阀的④接口和⑤接口),和,空簧总风缸24的气路输出端—另一组空簧压力风缸23的气路输入端—另一组空簧压力风缸23的气路输出端—智能阀15的缓冲输入端(如图5所示的智能阀的④接口和⑤接口)。
将空簧压力总风缸24内的压缩空气存储在两组空簧压力风缸23内,有两组空簧压力风缸23为轨道车辆的空簧系统提供压缩空气,以对轨道车辆的空簧系统的压力记性调节,轨道车辆的空簧系统用于对列车进行减震和隔震,保证轨道车辆的平稳运行。
需要说明的是,本申请实施例提供的每组空簧压力风缸23包括两个,一个的气路输出端与网关阀12或智能阀15的④接口气路连接,另一个的气路输出端与网关阀12或智能阀15的⑤接口气路连接。
以网关阀为例进行说明,本申请实施例提供的轨道车辆的制动实训系统的制动原理为:
电气控制柜11向网关阀12发送缓冲控制指令,网关阀12根据缓冲控制指令进行计算,得到进行减震或隔震所需要的缓冲气压值,由一组空簧压力风缸23向网关阀12的缓冲输入端输入对应缓冲气压值的缓冲气压,并由网关阀12将缓冲气压传输到轨道车辆的空簧系统中,以模拟对轨道车辆进行减震或隔震;可通过压力表检测每个空簧压力风缸输出端缓冲气压值,从而判断减震或隔震效果。
本申请实施例提供的轨道车辆的制动实训系统,还包括:两组空簧压力风缸、空簧总风缸;每组空簧压力风缸的气路输入端连接空簧总风缸的气路输出端,一组空簧压力风缸的气路输出端与网关阀的缓冲输入端气路连接,另一组空簧压力风缸的气路输出端与智能阀的缓冲输入端气路连接。通过本申请实施例提供的方案,可以通过空簧压力风缸模拟轨道车辆的减震或隔震过程,使学员掌握减震或隔震的原理,提高实训教学效果。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,如图1和图5所示,该制动实训系统还包括:第一换向阀25和第二换向阀26。
第一换向阀25设置在网关阀12的缓冲输入端和一组空簧压力风缸23的气路输出端之间;第一换向阀25的控制端通信连接电气控制柜11的第五控制输出端X5。
第二换向阀25设置在智能阀15的缓冲输入端和另一组空簧压力风缸23的气路输出端之间;第二换向阀25的控制端通信连接电气控制柜11的第六控制输出端X6。
具体的,如图1所示,制动实训系统的电路连接部分还包括:电气控制柜11的第五控制输出端X5通信连接第一换向阀25的控制端,以向第一换向阀25发送第一换向故障指令;电气控制柜11的第六控制输出端X6通信连接第二换向阀25的控制端,以向第二换向阀26发送第二换向故障指令。
气路连接部分包括:当第一换向阀25接收到第一换向故障指令时,第一换向阀25的排气口打开进行排气,当第二换向阀26接收到第二换向故障指令时,第二换向阀26的排气口打开进行排气。
需要说明的是,当每组空簧压力风缸23包括两个时,第一换向阀25和第二换向阀26也包括两个。
以第一换向阀25为例进行说明,本申请实施例提供的轨道车辆的制动实训系统的工作原理为:
电气控制柜11向第一换向阀25发送第一换向故障指令,第一换向故障指令用于使得第一换向阀25的排气口打开,使得一组空簧压力风缸23向网关阀12输出的缓冲气压的缓冲气压值小于网关阀12根据缓冲控制指令计算得到的缓冲气压值,以模拟由于缓冲故障导致的对轨道车辆进行减震或隔震的效果较差的问题,可通过压力表判断减震或隔震效果。
本申请实施例提供的轨道车辆的制动实训系统,还包括:第一换向阀和第二换向阀;第一换向阀设置在网关阀的缓冲输入端和一组空簧压力风缸的气路输出端之间;第一换向阀的控制端通信连接电气控制柜的第五控制输出端;第二换向阀设置在智能阀的缓冲输入端和另一组空簧压力风缸的气路输出端之间;第二换向阀的控制端通信连接电气控制柜的第六控制输出端。通过本申请实施例提供的方案,可实现模拟由于缓冲故障导致的对轨道车辆进行减震或隔震的效果较差的问题,便于学员掌握减震或隔震故障,提高实训教学效果。
在上述实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训系统,如1和图5所示,该制动实训系统还包括:第一电动球阀27和第二电动球阀28。
第一电动球阀27设置在总风缸18的气路输出端和每组空簧压力风缸23的气路输入端之间;第一电动球阀27的控制端通信连接电气控制柜11的第七控制输出端X7。
第二电动球阀28设置在空簧总风缸24的气路输出端和每组空簧压力风缸23的气路输入端之间;第二电动球阀28的控制端通信连接电气控制柜11的第七控制输出端X7。
具体的,如图1所示,制动实训系统的电路连接部分还包括:电气控制柜11的第七控制输出端X7通信连接第一电动球阀27的控制端和第二电动球阀28的控制端,以向第一电动球阀27和第二电动球阀28发送充气故障指令。
制动实训系统的气路连接部分还包括:正常状态下,第一电动球阀27的正常状态为关闭,第二电动球阀28的正常状态为打开,空簧总风缸24的气路输出端通过第二电动球阀28为每组空簧压力风缸23充气;故障状态下,第一电动球阀27的正常状态为打开,第二电动球阀28的正常状态为关闭,总风缸18的气路输出端通过第一电动球阀27为每组空簧压力风缸23充气。
本申请实施例提供的轨道车辆的制动实训系统的工作原理为:
电气控制柜11向第一电动球阀27和第二电动球阀28发送充气故障指令,第一电动球阀27根据充气故障指令由关闭状态变为打开状态,第二电动球阀28根据充气故障指令由打开状态变为关闭状态,导致每组空簧压力风缸23充气异常,可根据压力表判断每组空簧压力风缸23的充气异常,实现每组空簧压力风缸的充气故障模拟。
本申请实施例提供的轨道车辆的制动实训系统,还包括:第一电动球阀和第二电动球阀;第一电动球阀设置在总风缸的气路输出端和每组空簧压力风缸的气路输入端之间;第一电动球阀的控制端通信连接电气控制柜的第七控制输出端;第二电动球阀设置在空簧总风缸的气路输出端和每组空簧压力风缸的气路输入端之间;第二电动球阀的控制端通信连接电气控制柜的第七控制输出端。通过本申请实施例提供的方法,可实现空簧压力风缸的充气故障模拟,便于学员掌握充气故障,提高实训教学效果。
在上述任一实施例的基础上,本申请实施例还提供一种轨道车辆的制动实训控制柜,该制动实训控制柜包括:构架和上述任一实施例的制动实训系统,该制动实训系统固定安装在构架上。
具体的,制动实训系统中的各个单元以架空形式安装,可以通过螺丝紧固组合安装在构架上,也可以分开安装。示例的,构架可以为可拆卸铝合金构架。以架空形式安装可以节约制动实训控制柜对空间和场地的要求,降低成本,且可以方便直观的查看各单元的执行动作过程。
上仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 轨道车辆的制动实训系统、制动实训控制柜
- 城市轨道交通车辆制动实训设备气路系统