旋转角度检测装置及包含该旋转角度检测装置的电动助力转向装置
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及旋转角度检测装置,特别涉及基于正弦信号和余弦信号来检测旋转体的旋转角度的旋转角度检测装置。此外,也涉及包含该旋转角度检测装置的电动助力转向装置。
背景技术
作为检测电动机等旋转体的旋转角度的单元,广泛使用了旋转变压器、MR(magneto resistance:磁阻)传感器等。这些单元输出基于旋转体的旋转角度的正弦信号和余弦信号。旋转角度检测装置基于正弦信号和余弦信号来检测旋转体的旋转角度(例如,参照专利文献1)。
专利文献1所记载的旋转角度检测装置中,读取正弦信号和余弦信号的峰值和谷值,并根据峰值和谷值的中点与预先决定的中点值之差,来计算中点校正值。旋转角度检测装置对正弦信号和余弦信号分别加上中点校正值来实施校正,并基于校正后的正弦信号和余弦信号来检测旋转体的旋转角度。
现有技术文献
专利文献
专利文献1:日本专利特开2008-273478号公报
发明内容
发明所要解决的技术问题
然而,专利文献1的旋转角度检测装置中,并未进行针对正弦信号和余弦信号中包含有除基波以外的频率分量的情况的应对。因此,专利文献1的旋转角度检测装置中,在正弦信号和余弦信号中包含有除基波以外的频率分量的情况下,会在旋转角度检测装置所检测的旋转角度与旋转体的实际的旋转角度之间产生误差。
本发明是为了解决上述那样的问题而完成的,其目的在于提供一种旋转角度检测装置,该旋转角度检测装置能够抑制由于正弦信号和余弦信号中包含基波以外的频率分量所引起的误差。
用于解决技术问题的技术手段
为了解决上述问题,本发明所涉及的旋转角度检测装置包括:系数识别部,该系数识别部根据基于旋转体的旋转角度的正弦信号和余弦信号来识别正弦信号和余弦信号中所包含的频率分量的系数;校正值计算部,该校正值计算部基于由系数识别部识别出的系数来计算校正值;以及旋转角度计算部,该旋转角度计算部基于利用校正值正弦信号和余弦信号的任意一方或双方进行校正而得的值,来计算旋转体的旋转角度。
另外,本发明涉及的旋转角度检测装置包括:中间信号生成部,该中间信号生成部根据基于旋转体的旋转角度的正弦信号和余弦信号之积,来生成中间信号;乘法部,该乘法部将正弦信号和余弦信号的任意一方与中间信号相乘;加减法部,该加减法部将正弦信号和余弦信号的任意另一方与乘法部的输出相加,或从正弦信号和余弦信号的任意另一方中减去乘法部的输出;以及旋转角度计算部,该旋转角度计算部基于正弦信号和余弦信号的任意一方以及加减法部的输出,来计算旋转体的旋转角度。
发明效果
根据本发明所涉及的旋转角度检测装置,能够抑制由于正弦信号和余弦信号中包含基波以外的频率分量而引起的误差。
附图说明
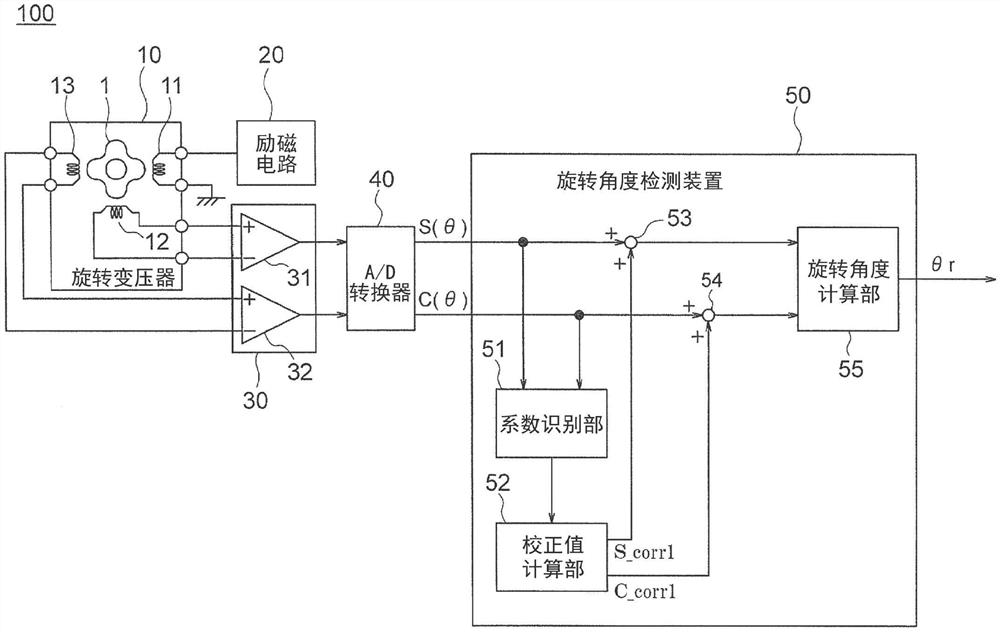
图1是示出包含本发明实施方式1所涉及的旋转角度检测装置的旋转角度检测系统的结构的框图。
图2是示出图1的励磁电路所生成的交流信号的时间波形的图。
图3是示出出现在图1的正弦检测线圈的输出端的信号的时间波形的图。
图4是示出出现在图1的余弦检测线圈的输出端的信号的时间波形的图。
图5是示出图1的系数识别部的内部结构的框图。
图6是示出图1的校正值计算部的内部结构的框图。
图7是示出包含本发明实施方式2所涉及的旋转角度检测装置的旋转角度检测系统的结构的框图。
图8是示出包含本发明实施方式3所涉及的旋转角度检测装置的旋转角度检测系统的结构的框图。
图9是示出图8的校正值计算部的内部结构的框图。
图10是示出包含本发明实施方式4所涉及的旋转角度检测装置的旋转角度检测系统的结构的框图。
图11是示出图10的中间信号生成部的内部结构的框图。
图12是示出本发明实施方式5所涉及的电动助力转向装置的结构的框图。
图13是示出用作为专用硬件的处理电路来实现本发明实施方式1~5所涉及的旋转角度检测装置的各功能的情况的结构图。
图14是示出用具备处理器和存储器的处理电路来实现本发明实施方式1~5所涉及的旋转角度检测装置的各功能的情况的结构图。
具体实施方式
以下,参照附图,对本申请所公开的旋转角度检测装置的实施方式进行详细说明。其中,下面所示的实施方式为一个示例,但本发明并不限于这些实施方式。
实施方式1.
图1是示出包含本发明实施方式1所涉及的旋转角度检测装置50的电动助力转向装置100的结构的框图。
旋转角度检测系统100包括旋转变压器10、励磁电路20、差动放大装置30、A/D转换器40和旋转角度检测装置50。
旋转变压器10包含与未图示的电动机一体旋转的转子1、利用励磁电路20所生成的交流信号来进行驱动的励磁线圈11、检测电动机的旋转角度的正弦的正弦检测线圈12、以及检测电动机的旋转角度的余弦的余弦检测线圈13。
若由图2所示的交流信号驱动励磁线圈11,则由图3所示的电动机的旋转角度的正弦进行振幅调制后的信号被输出到正弦检测线圈12的输出端。此外,由图4所示的电动机的旋转角度的余弦进行振幅调制后的信号被输出到余弦检测线圈13的输出端。
另外,图2~图4的横轴表示时间轴,表示旋转变压器10的旋转角度的1周期。此外,图2~图4的纵轴表示各信号的振幅。
返回图1,正弦检测线圈12的两输出端间的信号被差动放大装置30中所包含的第1差动放大器31差动放大,并输入到A/D转换器40。同样地,余弦检测线圈13的两输出端间的信号被差动放大装置30中所包含的第2差动放大器32差动放大,并输入到A/D转换器40。
A/D转换器40中,图3、图4中圆形标记所示的正弦值和余弦值的各峰值点、即差动放大装置30所检测出的正弦值和余弦值的各峰值点被A/D转换。然后,从连接这些峰值点的信号序列中得到图3、图4中粗线所示的正弦信号S(θ)和余弦信号C(θ)。这里,θ是电动机的旋转角度。
另外,在从A/D转换器40输出的正弦信号S(θ)的振幅与余弦信号(θ)的振幅存在差异的情况下,可以实施校正以使得两者的差接近零。
返回图1,从A/D转换器40输出的正弦信号S(θ)和余弦信号(θ)被分别输入到旋转角度检测装置50。
旋转角度检测装置50包含系数识别部51、校正值计算部52、加法部53、加法部54以及旋转角度计算部55。
系数识别部51基于正弦信号S(θ)及余弦信号C(θ),分别识别并输出正弦信号(θ)及余弦信号(θ)中包含的0次分量和2次分量的系数。
图5是示出实施方式1的系数识别部51的内部结构的框图。下面,对系数识别部51的各要素以及动作进行详细说明。
低通滤波器51a输出对余弦信号C(θ)施加低通滤波后的值a0_cal。这里,a0_cal是余弦信号C(θ)中包含的0次分量、即直流分量的系数的识别值。
低通滤波器51b输出对正弦信号S(θ)施加低通滤波后的值c0_cal。这里,c0_cal是正弦信号S(θ)中包含的0次分量、即直流分量的系数的识别值。
接着,乘法器51c输出余弦信号C(θ)立方值C(θ)
低通滤波器51d输出对余弦信号C(θ)的立方值C(θ)
增益51e输出将低通滤波器51d的输出X1的(4/(3×a1
增益51f输出a0_cal的2倍的值a0_cal×2。
减法器51g输出从增益51e的输出X2减去增益51f的输出a0_cal×2后的值a2_cal。这里,a2_cal是余弦信号C(θ)中包含的2次分量的系数的识别值。
接着,乘法器51h输出正弦信号S(θ)的立方值S(θ)
低通滤波器51i输出对正弦信号S(θ)的立方值S(θ)
增益51j输出低通滤波器51i的输出X3的(4/(3×d1
增益51k输出c0_cal的2倍的值c0_cal×2。
减法器51l输出从增益51j的输出X4减去增益51k的输出c0_cal×2后的值c2_cal。这里,c2_cal是正弦信号S(θ)中包含的2次分量的系数的识别值。
接着,乘法器51m输出余弦信号C(θ)的平方与正弦信号S(θ)之积C(θ)
低通滤波器51n输出对C(θ)
增益51o输出低通滤波器51n的输出X5的(4/a1
减法器51p输出从增益51o的输出X6减去增益51j的输出X4后的值。
增益51q输出减法器51p的输出的0.5倍的值。
减法器51r输出从增益51q的输出减去c2_cal后的值b2_cal。这里,b2_cal是余弦信号C(θ)中包含的2次分量的系数的识别值。
接着,乘法器51s输出余弦信号C(θ)与正弦信号S(θ)的平方之积C(θ)S(θ)
低通滤波器51t输出对C(θ)S(θ)
增益51u输出低通滤波器51t的输出X7的(4/d1
减法器51v输出从增益51u的输出X8减去增益51e的输出X2后的值。
增益51w输出减法器51v的输出的0.5倍的值。
加法器51y输出对增益51w的输出加上a2_cal后的值d2_cal。这里,d2_cal是正弦信号S(θ)中包含的2次分量的系数的识别值。
因此,系数识别部51输出六个系数识别值a0_cal、c0_cal、a2_cal、c2_cal、b2_cal、d2_cal。
系数识别部51通过对余弦信号C(θ)的一次方应用低通滤波器,从而识别余弦信号C(θ)中包含的0次分量的系数a0_cal。另外,系数识别部51通过对正弦信号S(θ)的一次方应用低通滤波器,从而识别正弦信号S(θ)中包含的0次分量的系数c0_cal。
综上所述,对于满足M+N=1的0以上的各整数M、N,系数识别部51基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来识别正弦信号S(θ)及余弦信号C(θ)中包含的M+N-1次分量、即0次分量的系数a0_cal、c0_cal。
另外,系数识别部51基于对正弦信号的立方、余弦信号的立方、余弦信号的平方与正弦信号的1次方之积、以及正弦信号的平方与正弦信号的1次方之积分别应用低通滤波器而得的结果,来分别识别正弦信号S(θ)及余弦信号C(θ)中包含的2次分量的系数a2_cal、c2_cal、b2_cal、d2_cal。
综上所述,对于满足M+N=3的0以上的各整数M、N,系数识别部51基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来识别正弦信号S(θ)及余弦信号C(θ)中包含的M+N-1次分量、即2次分量的系数a2_cal、c2_cal、b2_cal、d2_cal。
返回图1,从系数识别部51输出的六个系数识别值a0_cal、c0_cal、a2_cal、c2_cal、b2_cal和d2_cal被输入到校正值计算部52。
校正值计算部52基于从系数识别部51输入的六个系数识别值,分别计算正弦信号S(θ)的校正值S_carr1及余弦信号C(θ)的校正值C_carr1。
图6是示出实施方式1的校正值计算部52的内部结构的框图。下面,对校正值计算部52的各要素以及动作进行说明。
首先,加法器52a将从系数识别部51输入的a2_cal和d2_cal相加,输出相加结果a2_cal+d2_cal。
增益52b将加法器52a的输出乘以0.5倍,输出相乘结果0.5(a2_cal+d2_cal)。
减法器52c从由系数识别部51输入的a0_cal中减去增益52b的输出,并输出相减结果a0_cal-0.5(a2_cal+d2_cal)。
增益52d将减法器52c的输出乘以-1倍,并将结果作为C_corr1输出。
因此,从校正值计算部52输出的余弦信号C(θ)的校正值C_corr1如下所示。
[数学式1]
C_corr1=-a0_cal+0.5(a2_cal+d2_cal) (1)
接着,减法器52e从由系数识别部51输入的c2_cal中减去b2_cal,并输出相减结果c2_cal-b2_cal。
增益52f将加法器52e的输出乘以0.5倍,输出相乘结果0.5(c2_cal-b2_cal)。
加法器52g将从由系数识别部51输入的c0_cal与增益52f的输出相加,输出相加结果c0_cal+0.5(-b2_cal+c2_cal)。
增益52h将加法器52g的输出乘以-1倍,并将结果作为S_corr1输出。
因此,从校正值计算部52输出的正弦信号S(θ)的校正值S_corr1如下所示。
[数学式2]
S_corr1=-c0_cal+0.5(b2_cal-c2_cal) (2)
返回图1,从偏移计算部52输出的校正值S_corr1被输入到加法部53。加法部53将正弦信号(θ)和校正值S_corr1相加,输出到旋转角度计算部55。
从偏移计算部52输出的校正值C_corr1输入到加法部54。加法部54将余弦信号C(θ)和校正值C_corr1相加,输出到旋转角度计算部55。
旋转角度计算部55基于S(θ)+S_corr1及C(θ)+C_corr1,根据下式,计算旋转角度信号θr。
[数学式3]
以下,对于在上述旋转角度检测装置50中由于正弦信号S(θ)和余弦信号C(θ)中包含除基波以外的频率分量而引起的旋转角度误差被抑制的理由进行详细说明。
首先,考虑余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示的情况。
[数学式4]
C(θ)=cos(θ) (4)
[数学式5]
S(θ)=sin(θ) (5)
该情况下,余弦信号C(θ)的0次分量、即直流分量的系数为零。此外,余弦信号C(θ)的基波以外的谐波分量的系数也为零。另外,基波分量即1次分量的系数为1。
同样地,正弦信号S(θ)的0次分量、即直流分量的系数为零。此外,正弦信号S(θ)的基波以外的谐波分量的系数也为零。另外,基波分量即1次分量的系数为1。
该情况下,考虑假设余弦信号C(θ)与正弦信号S(θ)的校正值为C_corr1=0、S_corr1=0的情况。于是,旋转角度信号θr根据式(3)而计算如下。
[数学式6]
因此,旋转角度信号θr变成与电动机的实际旋转角度θ相等。另外,基于旋转角度信号θr与电动机的实际旋转角度θ之差而求得的旋转角度误差Δθ变成零。
接着,考虑余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示的情况。式(4)、式(5)和式(7)、式(8)的不同点在于存在0次分量、即直流分量。
[数学式7]
C(θ)=a0+cos(θ) (7)
[数学式8]
S(θ)=c0+sin(θ) (8)
该情况下,也试着考虑假设余弦信号C(θ)与正弦信号S(θ)的校正值为C_corr1=0、S_corr1=0的情况。然后,如果根据式(3)计算旋转角度信号θr,并基于此求得旋转角度误差Δθ,则成为如下那样。
[数学式9]
Δθ=c0·cos(θ)-a0·sin(θ) (9)
即,由于余弦信号C(θ)以及正弦信号S(θ)中包含0次分量a0、c0,因此,会产生与正弦信号S(θ)及余弦信号C(θ)的基波同周期的旋转角度误差Δθ。
此后,将与正弦信号S(θ)及余弦信号C(θ)的基波同周期的旋转角度误差称为1f的旋转角度误差。另外,将与正弦信号S(θ)及余弦信号C(θ)的2次分量同周期的旋转角度误差称为2f的旋转角度误差。以下,同样定义3f、4f的旋转角度误差。
在专利文献1中,根据正弦信号S(θ)及余弦信号C(θ)的峰值和谷值来求得中点校正值。如果按此来进行运算,则校正值为C_corr1=-a0、S_corr1=-c0。在这种情况下,如果根据式(3)计算旋转角度信号θr,则成为如下那样。
[数学式10]
因此,在余弦信号C(θ)与正弦信号S(θ)分别包含0次分量a0、c0的情况下,根据专利文献1的方法,能够抑制旋转角度误差Δθ。
接着,考虑余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示的情况。式(7)、式(8)和式(11)、式(12)的不同点在于,存在2次分量、即基波频率的2倍的频率分量。
[数学式11]
C(θ)=a0+cos(θ)+a2·cos(2θ)+b2·sin(2θ) (11)
[数学式12]
S(θ)=c0+sin(θ)+c2·cos(2θ)+d2·sin(2θ) (12)
此处也同样地,考虑假设余弦信号C(θ)与正弦信号S(θ)的校正值为C_corr1=0、S_corr1=0的情况。然后,如果根据式(3)计算旋转角度信号θr,并基于此求得旋转角度误差Δθ,则成为如下那样。
[数学式13]
Δθ=(c0+0.5(c2-b2))·cos(θ)+(-a0+0.5(a2+d2))·sin(θ)
+0.5(b2+c2)·cos(3θ)+0.5(-a2+c2)·sin(3θ) (13)
在上述旋转角度误差Δθ中,由于式(11)、式(12)中包含的2次分量的系数a2、b2、c2、d2的存在,1f的旋转角度误差的系数与式(9)的系数不同。
因此,即使根据专利文献1的方法求出正弦信号S(θ)及余弦信号C(θ)的中点校正值,并作为修正值C_corr1=-a0、S_corr1=-c0,也不能抑制1f由于式(13)的a2、b2、c2、d2而引起的旋转角度误差。
反之,如上所述,本实施方式1的校正值计算部52的输出由式(1)、式(2)给出。
此处,在从系数识别部51输出的系数识别值a0_cal、c0_cal、a2_cal、b2_cal、c2_cal、d2_cal分别与a0、c0、a2、b2、c2、d2相一致时,即在系数识别值与真系数相一致时,式(1)、式(2)分别如下所述。
[数学式14]
C_corr1=-a0+0.5(a2-d2) (14)
[数学式15]
S_corr1=-c0+0.5(b2-c2) (15)
如果使用上述校正值,根据式(3)计算旋转角度信号θr,并进一步求得旋转角度误差Δθ,则成为如下那样。
[数学式16]
Δθ=0.5(b2+c2)·cos(3θ)+0.5(-a2+d2)·sin(3θ) (16)
因此,当在正弦信号S(θ)及余弦信号C(θ)中包含0次分量及2次分量的情况下应用本实施方式1的校正值C_corr1、S_corr1来计算旋转角度信号θr时,3f的旋转角度误差虽然残留,但是1f的旋转角度误差变成零。
即,如果正确地进行系数识别部51所进行的系数识别,则即使在正弦信号S(θ)及余弦信号C(θ)包含2次分量的情况下,也能通过本实施方式1的校正值C_corr1、S_corr1来使1f的旋转角度误差变为零。
接着,对通过图5所示的本实施方式1的系数识别部51正确地进行正弦信号S(θ)及余弦信号C(θ)的系数识别的理由进行详细地说明。
首先,余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示。
[数学式17]
C(θ)=a0+a1·cos(θ)+a2·cos(2θ)+b2·sin(2θ) (17)
[数学式18]
S(θ)=c0+d1·sin(θ)+c2·cos(2θ)+d2·sin(2θ) (18)
在上式中,如果设a1=1,d1=1,则式(17)、式(18)与式(11)、式(12)相一致。即式(17)、式(18)是将式(11)、式(12)进一步一般化的表现。
对余弦信号(θ)及正弦信号(θ)获取电动机的旋转角度的1周期的平均值,对于这一点,分别如下所示。
[数学式19]
Ave{C(θ)}=a0 (19)
[数学式20]
Ave{S(θ)}=c0 (20)
此外,在上式中,Ave{}是括号内的平均的意思。
因此,余弦信号C(θ)的直流分量的系数a0能够通过对余弦信号C(θ)获取电动机的旋转角度的1周期的平均值或进行1周期的累计来求得。
同样地,正弦信号S(θ)的直流分量的系数c0能够通过对正弦信号S(θ)获取电动机的旋转角度的1周期的平均或进行1周期的累计来求得。
本实施方式1的系数识别部51构成为,通过使用与进行1周期的累计等效或时间常数比其长的低通滤波器,来分别计算Ave{C(θ)}=a0、Ave{S(θ)}=c0。
详细而言,在图5中,通过对余弦信号C(θ)应用低通滤波器51a,从而能够将a0识别为a0_cal。同样地,通过对正弦信号S(θ)应用低通滤波器51b,从而能够将c0识别为c0_cal。
即,通过对余弦信号C(θ)的一次方、换言之余弦信号C(θ)其本身应用低通滤波器51a,从而能够识别余弦信号C(θ)的0次分量、即直流分量的系数a0。
同样地,通过对正弦信号S(θ)的一次方、换言之正弦信号S(θ)其本身应用低通滤波器51b,从而能够识别余弦信号S(θ)的0次分量、即直流分量的系数c0。
接着,如下所述,分别对图5的乘法器51c的输出C(θ)
[数学式21]
Ave{C(θ)
[数学式22]
Ave{S(θ)
[数学式23]
Ave{C(θ)
[数学式24]
Ave{C(θ)·S(θ)
这里,通过将低通滤波器51d、51i、51n、51t设为与进行1周期的累计等效、或者时间常数比其长的低通滤波器,从而图3的X1、X3、X5、X7分别如下所示。
[数学式25]
X1=3a1
[数学式26]
X3=3d1
[数学式27]
X5=a1·(2·b2·d1+a1·c2+2·a1·c0)/4
≈a1
[数学式28]
X7=d1·(-a2·d1+2·a1·d2+2·a0·d1)/4
≈d1
进一步地,通过将上述各式与增益51e、51j、51o、51u分别相乘,从而图5的X2、X4、X6、X8分别如下所示。
[数学式29]
X2=a2+2·a0 (29)
[数学式30]
X4=-c2+2·c0 (30)
[数学式31]
X6=2·b2+c2+2·c0 (31)
[数学式32]
X8=-a2+2·d2+2·a0 (32)
因此,根据在式(29)中求出的X2、a0_cal与a0相一致的情况、以及减法器51g和增益51f的运算,a2_cal如下所示。
[数学式33]
a2_cal=X2-2·a0_cal=(a2+2·a0)-2·a0=a2 (33)
同样地,根据在式(30)中求出的X4、c0_cal与c0相一致的情况、以及减法器511和增益51k的运算,c2_cal如下所示。
[数学式34]
c2_cal=-X4+2·c0_cal=-(-c2+2·c0)+2·c0=c2 (34)
同样地,通过在式(30)中求出的X4、在式(31)中求出的X6、c2_cal与c2相一致的情况、以及减法器51p、增益51q和减法器51r的运算,b2_cal如下所示。
[数学式35]
b2_cal=0.5(X6-X4)-c2_cal
=0.5((2·b2+c2+2·c0)-(-c2+2·c0))-c2=b2 (35)
同样地,通过在式(29)中求出的X2、在式(32)中求出的X8、a2_cal与a2相一致的情况、以及减法器51v、增益51w和减法器51y的运算,d2_cal如下所示。
[数学式36]
d2_cal=0.5(X8-X2)+a2_cal
=0.5((-a2+2·d2+2·a0)-(a2+2·a0))+a2=d2 (36)
根据上述式(33)、式(34)、式(35)、式(36),通过图5的结构而识别出的2次分量的各系数a2_cal、b2_cal、c2_cal、d2_cal与式(17)、式(18)的2次分量的各系数a2、b2、c2、d2相一致。
由此,示出了能够通过图5的系数识别部51正确地识别正弦信号S(θ)和余弦信号C(θ)中包含的、0次分量的系数a0_cal、c0_cal以及2次分量的系数a2_cal、c2_cal、b2_cal、d2_cal。
另外,在图5的各低通滤波器中,如果能够以电动机的旋转速度的变动频带以上的速度执行运算,则与电动机的旋转角度的1周期的累计运算相比,低通滤波器的高频截止功能更高精度地起作用。其结果,式(19)~式(24)的运算被更高精度地进行。因此,优选以电动机的旋转速度的变动频带以上的速度来更新低通滤波器51a、51b、51d、51i、51n、51t的输出值。
作为一个例子,在电动助力转向的辅助用电动机的情况下,其旋转速度的变动频带的上限大约是5Hz。因此,在对应于5Hz的电动机的转速以上的情况下,优选更新各低通滤波器的输出值。在该情况下,在对应于小于5Hz的电机的转速的情况下,低通滤波器的输出值优选维持上次值。
另外,上述实施方式1中,通过对正弦信号S(θ)及余弦信号C(θ)基于0次分量和2次分量的各系数的识别结果来进行校正,从而抑制旋转角度误差Δθ。除此以外,还能利用如下式那样表示旋转角度误差Δθ的情况,来校正旋转角度信号θr。
[数学式37]
Δθ=((2·co-b2+c2)cos(θ)+(-2·a0+a2+d2)sin(θ))/(2·a1) (37)
此外,上述旋转角度检测装置50所检测的旋转角度是电动机的旋转角度,但本实施方式1所涉及的发明的可应用范围并不限于此。本实施方式1所涉及的发明能适用于任意旋转体、即旋转的物体。
如上所述,本发明实施方式1所涉及的旋转角度检测装置包括:系数识别部,该系数识别部根据基于旋转体的旋转角度的正弦信号和余弦信号,来识别正弦信号和余弦信号中所包含的频率分量的系数;校正值计算部,该校正值计算部基于由系数识别部识别出的系数来计算校正值;以及旋转角度计算部,该旋转角度计算部基于利用校正值对正弦信号和余弦信号的任意一方或双方进行校正而得的值,来计算旋转体的旋转角度。
另外,对于满足M+N=1的0以上的各整数M、N,本实施方式1的系数识别部基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来识别正弦信号及余弦信号中包含的M+N-1=0次分量的系数。
另外,对于满足M+N=3的0以上的各整数M、N,本实施方式1的系数识别部基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来进一步识别正弦信号及余弦信号中包含的M+N-1=2次分量的系数。
实施方式2.
接着,对本发明实施方式2所涉及的旋转角度检测装置250进行说明。另外,在之后的实施方式中,对于与之前的实施方式相同或通用的结构要素,标注相同参照标号并省略详细说明。
图7是示出包含本发明实施方式2所涉及的旋转角度检测装置250的旋转角度检测系统200的结构的框图。
实施方式2所涉及的旋转角度检测装置250包含系数识别部251、校正值计算部252以及旋转角度计算部255。下面对实施方式2的旋转角度检测装置250的详细情况依次进行说明。
首先,考虑余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示的情况。
[数学式38]
C(θ)=a1·cos(θ)+b1·sin(θ)+a3·cos(3θ)+b3·sin(3θ) (38)
[数学式39]
S(θ)=c1·cos(θ)+d1·sin(θ)+c3·cos(3θ)+d3·sin(3θ) (39)
此时,如果对C(θ)
[数学式40]
Ave{C(θ)
[数学式41]
Ave{C(θ)}≈(b1·d1+a1·c1)/2≈a1·(b1+c1)/2 (41)
[数学式42]
Ave{S(θ)
另外,如果对C(θ)
[数学式43]
Ave{C(θ)
[数学式44]
[数学式45]
Ave{C(θ)
=a1·d1·(a1·d1+2·a1·d3-2·a3·d1)/8 (45)
[数学式46]
[数学式47]
Ave{S(θ)
式(45)中,a1和d1分别与d3和a3相乘。因此,可以使用式(43)和式(47)来计算a3和d3。如式(45)那样,在正弦信号S(θ)及余弦信号C(θ)都为平方以上的情况下,不能利用将微小系数的乘积视为0来进行近似的方法来将a1替换为d1或将d1替换为a1。
因此,对于系数的识别,适合使用正弦信号S(θ)或余弦信号C(θ)中的任意一方为1次方以下的式子。如果整理式(40)~式(44)及式(46)~式(47),则成为如下那样。
[数学式48]
[数学式49]
[数学式50]
b1+c1=2·Ave{C(θ)S(θ)}/a1 (50)
[数学式51]
a3=(8·Ave{C(θ)
[数学式52]
b3=(6·Ave{C(θ)
[数学式53]
c3=(-2·Ave{C(θ)
[数学式54]
d3=(-8·Ave{S(θ)
系数识别部251基于式(48)~式(54),识别正弦信号S(θ)及余弦信号C(θ)中包含的1次分量的系数和三次分量的系数。
校正值计算部252计算校正值,该校正值抑制2f由于正弦信号S(θ)及余弦信号C(θ)中包含的1次分量以及3次分量而引起的旋转角度误差。
例如,校正值计算部252计算由下述式(55)、式(56)给出的校正值G1、G2,并且根据式(57)校正余弦信号C(θ)。由此,能够抑制2f由于正弦信号S(θ)及余弦信号C(θ)中包含的1次分量以及3次分量而引起的旋转角度误差。
[数学式55]
G1=d1
[数学式56]
G2=(-a1(c1+c3)-d1(b1-b3))/((a1-a3)(d1-d3)) (56)
[数学式57]
Correct{C(θ)}=G1·C(θ)+G2·S(θ) (57)
另外,这里示出了计算余弦信号C(θ)的校正值的示例,但也可以计算正弦信号S(θ)的校正值。此外,可以对正弦信号S(θ)及余弦信号C(θ)的校正值同时进行计算。此外,通过近似可以简化上述各式。
另外,上述实施方式2中,通过对正弦信号S(θ)及余弦信号C(θ)基于1次分量和3次分量的各系数的识别结果来进行校正,从而抑制旋转角度误差Δ θ。除此以外,还能利用如下式那样表示旋转角度误差Δ θ的情况,来校正旋转角度信号θr。
[数学式58]
Δθ=(((b1+c1)-b3+c3)cos(2θ)+(-a1+d1+a3+d3)sin(2θ))/(2·a1) (58)
如上述说明那样,对于满足M+N=2的0以上的各整数M、N,本实施方式2的系数识别部基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来识别正弦信号及余弦信号中包含的M+N-1=1次分量的系数。
另外,对于满足M+N=4的0以上的各整数M、N,本实施方式2的系数识别部基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来进一步识别正弦信号及余弦信号中包含的M+N-1=3次分量的系数。
实施方式3.
图8是示出包含本发明实施方式3所涉及的旋转角度检测装置350的旋转角度检测系统300的结构的框图。
实施方式3所涉及的旋转角度检测装置350包含系数识别部51、校正值计算部357、减法部358、减法部359、延迟部360和旋转角度计算部355。
系数识别部51与实施方式1相同,输出正弦信号S(θ)和余弦信号C(θ)中包含的、0次分量的系数识别值a0_cal、c0_cal以及2次分量的系数识别值a2_cal、c2_cal、b2_cal、d2_cal。
校正值计算部352基于从系数识别部51输出的系数、以及从旋转角度计算部355经由延迟部360输入的一个运算周期前的旋转角度信号θr_old,来计算校正值S_corr2、C_corr2。
减法部358从正弦信号S(θ)中减去由校正值计算部352计算出的校正值S_corr2,并将相减结果(S(θ)-S_corr1)输出到旋转角度计算部355。
减法部359从余弦信号C(θ)中减去由校正值计算部352计算出的校正值C_corr2,并将相减结果(C(θ)-C_corr1)输出到旋转角度计算部355。
旋转角度计算部355基于(S(θ)-S_corr1)及(C(θ)-C_corr1),根据下式来计算旋转角度信号θr。
[数学式59]
图9是示出实施方式3的校正值计算部352的内部结构的框图。下面,对校正值计算部352的各要素以及动作进行说明。
首先,加法器352a输出将ω·Δt与一个运算周期前的旋转角度信号θ¥ochr_old相加后的值θr_corr。这里,Δt是旋转角度计算部355计算旋转角度信号θr的运算周期。另外,ω是电动机的旋转角度。该ω能够通过ω=(θr-θr_old)/Δt来求得。或者,可以通过沿用作为公知技术的无旋转速度传感器控制等来推测ω。
另外,利用加法器352a来加上ω·Δt是由于被输入到校正值计算部352的旋转角度信号θ¥ochr_old比当前的旋转角度信号θr延迟了一个运算周期。通过将ω·Δt与θ¥ochr_old相加,从而使得θr_corr成为与当前的θr几乎一致的值。
接着,增益352b输出加法器352a的输出θr_corr的两倍的值θr_corr×2。
余弦计算器352c输出增益352b的输出θr_corr×2的余弦值cos(2·θr_corr)。
正弦计算器352d输出增益352b的输出θr_corr×2的正弦值sin(2·θr_corr)。
乘法器352e输出将a2_cal和余弦计算器352c的输出相乘后的值Y1。即,Y1表示如下。
[数学式60]
Y1=a2_cal·cos(2·θ
乘法器352f输出将b2_cal和正弦计算器352d的输出相乘后的值Y2。即,Y2表示如下。
[数学式61]
Y2=b2_cal·sin(2·θ
加法器352g输出将乘法器352e的输出Y1与乘法器352f的输出Y2相加后的值Y1+Y2。
加法器352h输出将a0_cal与加法器352g的输出Y1+Y2相加后的值C_corr2。C_corr2是余弦信号C(θ)的校正值,表示如下。
[数学式62]
C_corr2=a0_cal+Y1+Y2
=a0_cal+a2_cal·cos(2·θ
乘法器352i输出将c2_cal和余弦计算器352c的输出相乘后的值Y3。即,Y3表示如下。
[数学式63]
Y3=c2_cal·cos(2·θ
乘法器352j输出将d2_cal和正弦计算器352d的输出相乘后的值Y4。即,Y4表示如下。
[数学式64]
Y4=d2_cal·sin(2·θ
加法器352k输出将乘法器352i的输出Y3与乘法器352j的输出Y4相加后的值Y3+Y4。
加法器352l输出将c0_cal与加法器352l的输出Y3+Y4相加后的值S_corr2。S_corr2是正弦信号C(θ)的校正值,表示如下。
[数学式65]
S_corr2=c0_cal+Y3+Y4
=c0_cal+c2_cal·cos(2·θ
下面,对在上述旋转角度检测装置350中抑制旋转角度误差的理由进行详细地说明。
首先,余弦信号C(θ)与正弦信号S(θ)分别如以下那样来表示。此外,这些式(66)、式(67)与实施方式1所示的式(11)、式(12)相同。
[数学式66]
C(θ)=a0+cos(θ)+a2·cos(2θ)+b2·sin(2θ) (66)
[数学式67]
S(θ)=c0+sin(θ)+c2·cos(2θ)+d2·sin(2θ) (67)
另外,如在实施方式1中说明的那样,a0_cal=a0,c0_cal=c0,a1_cal=a1,b1_cal=b1,c1_cal=c1,d1_cal=d1。
另外,如上所述,成为θr_corr=θr,并且如果旋转角度信号θr与电动机的实际旋转角度θ相一致,则余弦信号C(θ)的校正值C_corr2及正弦信号S(θ)的校正值S_corr2分别成为如下那样。
[数学式68]
C_corr2=a0+a2·cos(2θ)+b2·sin(2θ) (68)
[数学式69]
S_corr2=c0+c2·cos(2θ)+d2·sin(2θ) (69)
因此,余弦信号C(θ)与校正值C_corr2之差、以及正弦信号S(θ)与校正值S_corr2之差别成为如下那样。
[数学式70]
C(θ)-C_corr2=cos(θ) (70)
[数学式71]
S(θ)-S_corr2=sin(θ) (71)
接着,如果根据式(59)计算旋转角度信号θr,则成为如下那样。
[数学式72]
因此,由旋转角度计算部355计算出的旋转角度信号θr与电动机的实际旋转角度θ完全一致。
在上述实施方式1中,余弦信号C(θ)以及正弦信号S(θ)分别由式(11)和式(12)给出的情况下,如式(16)所示那样不能抑制3f的旋转角度误差。
与此相对,在本实施方式3中,余弦信号C(θ)以及正弦信号S(θ)分别由式(66)和式(67)给出的情况下,不仅能使1f的旋转角度误差为零,还能使3f的旋转角度误差也变为零。
如上述说明那样,本实施方式3的校正值计算部进一步基于从旋转角度计算部经由延迟部而输入的一个运算周期前的旋转角度信号,来计算校正值。
实施方式4
图10是示出包含本发明实施方式4所涉及的旋转角度检测装置450的旋转角度检测系统400的结构的框图。
实施方式4所涉及的旋转角度检测装置450中,对于满足M+N=2的0以上的各整数M、N,基于对正弦信号的M次方与余弦信号的N次方之积应用低通滤波器而得的结果,来识别正弦信号及余弦信号中包含的M+N-1=1次分量的系数。
旋转角度检测装置450包含:基于正弦信号S(θ)与余弦信号C(θ)之积来生成中间信号TMP1的中间信号生成部461;乘法部462;加法部463;以及旋转角度计算部455。
如图11所示,中间信号生成部461包含乘法器461a、低通滤波器(LPF)461b和乘法器461c。
乘法器461a计算正弦信号S(θ)与余弦信号C(θ)之积S(θ)·C(θ)。即为M+N=2。
低通滤波器461b的截止频率设定为将正弦信号S(θ)和余弦信号C(θ)的基波频率的2倍以上的频率分量去除的值。因此,低通滤波器461b的输出X461b成为从乘法器461a的输出S(θ)·C(θ)中将其中所包含的正弦信号S(θ)和余弦信号C(θ)的基波频率的2倍以上的频率分量去除后而得的信号。
乘法器461c对低通滤波器461b的输出X461b乘以-2/(K·K)=-2/(K
另外,作为求出K的方法,可以将事先离线测得的振幅值设定为K。或者,如专利文献1中所记载的那样,也能通过读入正弦信号S(θ)或余弦信号C(θ)的峰值或谷值来进行离线计算。
返回图10,由中间信号生成部461生成的中间信号TMP1被输入到乘法部462。乘法部462中,对中间信号TMP1乘以正弦信号S(θ)。因此,乘法部462的输出OUT1=TMP1·S(θ)。
乘法部462的输出OUT1被输入到加法部463。加法部463中,将余弦信号C(S)与OUT1相加。因此,加法部463的输出为C_corr3(θ)=C(θ)+OUT1。
加法部463的输出C_corr3(θ)=C(θ)+OUT1被输入到旋转角度计算部455。此外,正弦信号S(θ)也被输入到旋转角度计算部455。
旋转角度计算部455基于加法部463的输出C_corr3(θ)=C(θ)+OUT1以及正弦信号S(θ),根据下式来计算旋转角度信号θr。
[数学式73]
下面,对在上述旋转角度检测装置450中抑制旋转角度误差的理由进行详细地说明。
另外,正弦信号S(θ)与余弦信号C(θ)分别如以下那样来表示。
[数学式74]
S(θ)=Ksin(θ) (74)
[数学式75]
C(θ)=Kcos(θ+α) (75)
即,正弦信号S(θ)与余弦信号C(θ)的相位差为π/2+α[rad]。由于余弦信号C(θ)中所包含的α,正弦信号S(θ)与余弦信号C(θ)之间的正交性下降。
这里,对正弦信号与余弦信号的正交性进行补充说明。当正弦信号S(θ)与余弦信号C(θ)之间的相位差与90度相一致时,定义为正弦信号S(θ)与余弦信号C(θ)正交、或具有正交性。另一方面,当正弦信号S(θ)与余弦信号C(θ)之间的相位差与90度不一致时,定义为正弦信号S(θ)与余弦信号C(θ)不正交、或不具有正交性。此外,正交性较高意味着正弦信号S(θ)与余弦信号C(θ)之间的相位差接近90度,正交性较低意味着正弦信号S(θ)与余弦信号C(θ)之间的相位差偏离90度。
在上述正弦信号S(θ)和余弦信号C(θ)被直接输入到旋转角度计算部455的情况下,若假设为上述OUT1为0,则相对于电动机的实际的旋转角度θ,在旋转角度信号θr中产生2f的旋转角度误差。抑制该2f的旋转角度误差是本实施方式4的目的。
这里,若将式(75)展开,则成为以下那样。
[数学式76]
C(θ)=Kcos(θ)cos(α)-Ksin(θ)sin(α) (76)
这里,若假设α足够小,则能近似为cos(α)≒1。因此,式(75)能如以下那样进行变形。
[数学式77]
C(θ)=Kcos(θ)-Ksin(θ)sin(α) (77)
若能从该式(77)中消除右边第2项,则正弦信号S(θ)与余弦信号C(θ)之间的正交性得到改善。
旋转角度检测装置450中的中间信号生成部461和乘法部462的目的在于提取式(77)的右边第2项。如上述那样,中间信号生成部461中,利用乘法器461a来计算正弦信号S(θ)与余弦信号C(θ)之积S(θ)·C(θ)。这里,若将S(θ)·C(θ)展开,则成为以下那样。
[数学式78]
式(78)中,右边第1项是由α规定的直流项。此外,右边第2项和第3项包含以正弦信号S(θ)和余弦信号(θ)的基波频率的2倍的频率进行振动的sin(2θ)和cos(2θ)。
若将式(78)的信号通过低通滤波器461b,则式(78)的右边第2项和第3项被去除,因此其输出X461b成为以下那样。
[数学式79]
若将式(79)的信号通过乘法器461c,则其输出TMP1成为以下那样。
[数学式80]
TMP1=sin(α) (80)
若将式(80)的中间信号TMP1通过旋转角度检测装置450的乘法部462,则其输出OUT1成为以下那样。
[数学式81]
OUT1=sin(α)·Ksin(θ) (81)
可知式(81)的-1倍与式(77)的右边第2项一致。
在旋转角度检测装置450的加法部463中实施以下运算。
[数学式82]
C_corr3(θ)=C(θ)+OUT1
=Kcos(θ+α)+sin(α)Ksin(θ)
=Kcos(θ) (82)
如上述那样,式(74)的正弦信号S(θ)与式(75)的余弦信号C(θ)未正交,但通过上述运算,式(77)的右边第2项被去除。其结果是,式(74)的正弦信号S(θ)以及与其正交的式(82)的信号被输入到旋转角度计算部455。
在旋转角度计算部455中,实施以下运算,2f的旋转角度误差被抑制。
[数学式83]
另外,上述旋转角度检测装置450的结构中,基于正弦信号S(θ)与余弦信号C(θ)之积S(θ)·C(θ)来生成中间信号TMP1,将正弦信号S(θ)与中间信号TMP1相乘,并将该相乘结果OUT1与余弦信号C(θ)相加。
然而,本实施方式4的结构并不限于此。例如,正弦信号S(θ)与余弦信号C(θ)也能分别如以下那样来表示。
[数学式84]
S(θ)=Ksin(θ+α) (84)
[数学式85]
C(θ)=Kcos(θ) (85)
该情况下,旋转角度检测装置450的结构中,能基于正弦信号S(θ)与余弦信号(θ)之积S(θ)·C(θ)来生成中间信号TMP1,将余弦信号C(θ)与中间信号TMP1相乘,并从正弦信号S(θ)中减去该相乘结果OUT1。
如上所述,本发明实施方式4所涉及的旋转角度检测装置包括:中间信号生成部,该中间信号生成部根据基于旋转体的旋转角度的正弦信号与余弦信号之积,来生成中间信号;乘法部,该乘法部将正弦信号和余弦信号的任意一方与中间信号相乘;加减法部,该加减法部将正弦信号和余弦信号的任意另一方与乘法部的输出相加,或从正弦信号和余弦信号的任意另一方中减去乘法部的输出;以及旋转角度计算部,该旋转角度计算部基于正弦信号和余弦信号的任意一方以及加减法部的输出,来计算旋转体的旋转角度。
此外,中间信号生成部包含:计算正弦信号与余弦信号之积的乘法器;以及从乘法器的输出中将正弦信号和余弦信号的基波频率的2倍以上的频率分量去除的低通滤波器。
实施方式5.
图12是示出本发明实施方式5所涉及的电动助力转向装置500的结构的框图。
实施方式5所涉及的电动助力转向装置500基于从实施方式1所涉及的旋转角度检测系统100输出的旋转角度信号θr,来产生对车辆的转向系统的转向转矩进行辅助的辅助转矩。
电动助力转向装置500包括旋转角度检测系统100、方向盘501、前轮502、变速箱503、转矩检测器504、电压指令生成装置506和交流电动机507。
交流电动机507经由齿轮503产生对转向系统的转向转矩进行辅助的辅助转矩。
旋转角度检测系统100检测交流电动机507的旋转角度,并输出旋转角度信号θr。
车辆的驾驶员通过操作方向盘501来进行前轮502的转向。
转矩检测器504检测转向系统的转向转矩Ts。
电压指令生成装置506基于转矩检测器504所检测出的转向转矩Ts、以及从旋转角度检测系统100输出的旋转角度信号θr,来决定施加到交流电动机507的驱动电压V。
详细而言,首先,电压指令生成装置506基于转向转矩Ts来计算交流电动机507的电流指令值。接着,电压指令生成装置506基于电流指令值和旋转角度信号θ¥ochr,来计算电压指令值。最后,电压指令生成装置506基于电压指令值来控制逆变器等功率转换器,由此来决定施加到交流电动机507的驱动电压V。
为了实现上述控制,例如可以使用另外设置对流过交流电动机507的电流进行检测的电流传感器、并基于电流指令值与电流传感器的检测值之间的偏差来运算电压指令值等的公知技术。
一般,在电动助力转向装置中,交流电动机507的旋转角度的检测精度十分重要。
例如,假设在从旋转角度检测系统100输出的旋转角度信号θr与交流电动机507实际的旋转角度θ之间,产生了2f的旋转角度误差。该情况下,电压指令生成装置506将包含2f的旋转角度误差的驱动电压V施加到交流电动机。其结果是,2f的旋转角度误差的分量会混入交流电动机507所产生的转矩,导致产生纹波、振动、异响等。
因此,在电动助力转向装置中,从旋转角度检测系统100输出的旋转角度信号θr的精度非常重要。本实施方式5中,通过使用实施方式1所涉及的旋转角度检测系统100,从而能高精度地计算旋转角度信号θr。
另外,即使使用实施方式2~4所涉及的旋转角度检测系统来代替实施方式1所涉及的旋转角度检测系统100,也能得到与本实施方式5相同或其以上的效果。
此外,在上述实施方式1~5中,作为检测电动机的旋转角度的单元,使用了旋转变压器。然而,实施方式1~5可适用的范围并不限于此。对于输出与电动机的旋转角度对应的正弦信号和余弦信号的其它检测单元、例如MR传感器、编码器等,也能同样地应用实施方式1~5。
另外,上述实施方式1~5所涉及的旋转角度检测装置中的各功能利用处理电路来实现。实现各功能的处理电路可以是专用硬件,也可以是执行存储器中所存储的程序的处理器。图13是示出用作为专用硬件的处理电路1000来实现本发明实施方式1~5所涉及的旋转角度检测装置的各功能的情况的结构图。另外,图14是示出由具备处理器2001和存储器2002的处理电路2000来实现本发明实施方式1~5所涉及的旋转角度检测装置的各功能的情况的结构图。
在处理电路是专用硬件的情况下,处理电路1000例如与单一电路、复合电路、程序化后的处理器、并联程序化后的处理器、ASIC(Application Specific IntegratedCircuit:专用集成电路)、FPGA(Field Programmable Gate Array:现场可编程门阵列)或它们的组合相对应。旋转角度检测装置的各部分的功能可以分别由单独的处理电路1000来实现,也可以汇总各部分的功能并由处理电路1000来实现。
另一方面,在处理电路为处理器2001的情况下,旋转角度检测装置的各部分的功能由软件、固件或软件和固件的组合来实现。软件和固件记述为程序,存储于存储器2002中。处理器2001读取储存于存储器2002的程序并执行,从而实现各部分的功能。即,旋转角度检测装置包括在由处理电路2000执行时用于存储最终执行上述各控制的程序的存储器2002。
这些程序也可以是使计算机执行上述各部分的步骤或方法的程序。这里,存储器2002例如相当于RAM(Random Access Memory:随机存取存储器)、ROM(Read Only Memory:只读存储器)、闪存、EPROM(Erasable Programmable Read Only Memory:可擦除可编程只读存储器)、EEPROM(Electrically Erasable and Programmable Read Only Memory:电可擦可编程只读存储器)等非易失性或易失性的半导体存储器。另外,磁盘、软盘、光盘、压缩磁盘、小型磁盘、DVD等也相当于存储器2002。
另外,对于上述各部分的功能,可以用专用硬件来实现一部分,并用软件或固件来实现一部分。
由此,处理电路可以利用硬件、软件、固件或它们的组合来实现上述各部分的功能。
标号说明
50、250、350、450 旋转角度检测装置
51、251 系数识别部
52、252、352 校正值计算部
55、255、355、455 旋转角度计算部
360 延迟部
461 中间信号生成部
462 乘法部
463 加法部(加减法部)
500 电动助力转向装置
507 交流电动机(旋转体)
S(θ) 正弦信号
C(θ) 余弦信号
θr 旋转角度信号。
- 旋转角度检测装置及包含该旋转角度检测装置的电动助力转向装置
- 旋转角度检测装置以及使用该旋转角度检测装置的旋转角度检测单元