一种透镜拆除装置
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及零件拆装技术领域,具体而言,涉及一种透镜拆除装置。
背景技术
随着计算机技术的快速发展,与此相关的产品不断推陈出新。增强现实(AugmentedReality,AR)技术作为其中之一,在近些年得到了长足的发展,为人们的生活带来了方便与乐趣。增强现实技术,顾名思义是通过检测、模拟等方式将虚拟的信息应用到真实世界,真实的环境和虚拟的物体实时地叠加到了同一个画面或空间,从而增强人们的感官体验,使人们对真实世界的体验感得到提高。
现有技术中的增强现实技术均是以AR眼镜的形式作为产品输出,人们仅需要佩戴AR眼镜于眼部位置,即可体验AR。目前,当需要更换AR眼镜的透镜时,只能通过工人手动操作拆除透镜,不仅容易刮伤透镜,造成物料浪费,而且拆卸效率较低,导致拆卸时间较长。
发明内容
本发明的目的在于提供一种透镜拆除装置,能够避免在AR眼镜的拆装过程中刮伤透镜,还能够提高拆卸效率。
本发明的实施例是这样实现的:
本发明实施例提供一种透镜拆除装置,包括底座、设置于所述底座上的承载组件和拆除组件、设置于所述承载组件上的夹紧组件以及设置于所述拆除组件上的刀片组件,所述承载组件用于承载AR眼镜,所述夹紧组件用于与所述承载组件配合以将所述AR眼镜夹持于所述夹紧组件与所述承载组件之间,所述刀片组件的刀片与所述AR眼镜的镜框和透镜之间的间隙呈相对设置,所述拆除组件用于带动所述刀片组件相对所述AR眼镜运动,以将所述刀片组件的刀片伸入所述间隙内。该透镜拆除装置能够避免在AR眼镜的拆装过程中刮伤透镜,还能够提高拆卸效率。
可选地,所述底座上设置有安装槽,所述承载组件包括安装座和第一紧固件,所述安装座容置于所述安装槽内,所述第一紧固件依次穿过所述安装座和所述安装槽并抵持于所述底座内,以使所述安装座与所述安装槽固定连接。
可选地,所述安装槽包括槽本体以及设置于所述槽本体相对两侧的连接板,所述连接板上设置有连接孔,所述安装座包括座本体以及设置于所述座本体相对两侧的连接块,所述连接块上设置有连接槽,所述座本体容置于所述槽本体内,所述第一紧固件依次穿过所述连接槽和所述连接孔并抵持于所述底座内,以使所述连接块与所述连接板固定连接。
可选地,所述安装槽包括两个,两个所述安装槽呈相对且间隔设置,所述承载组件还包括支撑座,所述支撑座固定设置于两个所述安装槽之间,所述安装座和所述支撑座共同配合承载所述AR眼镜。
可选地,所述夹紧组件包括固定设置于所述安装座上的快速夹以及与所述快速夹固定连接的夹紧块,按压所述快速夹的手柄,可使所述夹紧块朝向靠近所述安装座的方向运动,以将所述AR眼镜夹持于所述夹紧块与所述安装座之间。
可选地,所述拆除组件包括固定座、定位板和第二紧固件,所述第二紧固件穿过所述固定座抵持于所述定位板内,以使所述固定座与所述定位板固定连接;所述底座上设置有定位座,所述定位座上设置有定位柱,所述定位板上设置有定位孔,所述定位柱容置于所述定位孔内,以使所述定位板与所述定位座定位安装。
可选地,所述拆除组件还包括滑动设置于所述固定座内的滑动座,所述刀片组件设置于所述滑动座上,所述固定座上设置有止挡柱,所述止挡柱用于对所述滑动座相对所述固定座的运动进行止挡,以对所述刀片组件相对所述AR眼镜的运动进行限位。
可选地,所述止挡柱包括柱本体以及设置在所述柱本体上的限位件,所述限位件相对所述柱本体运动,以对所述柱本体相对所述固定座运动进行限位。
可选地,所述刀片组件包括固定设置于所述滑动座上的固定块、滑动设置于所述固定块内的滑动块以及所述刀片,所述刀片包括固定设置于所述固定块上的第一子刀片以及固定设置于所述滑动块上的第二子刀片,所述第一子刀片和所述第二子刀片呈相对且间隔设置,所述滑动块相对所述固定块运动,以调节所述第二子刀片与所述第一子刀片之间的间距。
可选地,还包括按压组件,所述按压组件包括第一杆体以及与所述第一杆体的一端铰接的第二杆体,所述第一杆体的另一端与所述底座固定连接,所述第二杆体与所述滑动座抵持,按压所述第二杆体的另一端以使所述滑动座相对所述固定座运动。
本发明实施例的有益效果包括:
该透镜拆除装置包括底座、设置于底座上的承载组件和拆除组件、设置于承载组件上的夹紧组件以及设置于拆除组件上的刀片组件,承载组件用于承载AR眼镜,以为AR眼镜提供放置平台,夹紧组件用于与承载组件配合以将AR眼镜夹持于夹紧组件与承载组件之间,以使AR眼镜能够稳定可靠地固定于夹紧组件与承载组件之间,刀片组件的刀片与AR眼镜的镜框和透镜之间的间隙呈相对设置,拆除组件用于带动刀片组件相对AR眼镜运动,以将刀片组件的刀片伸入间隙内,以使镜框与透镜之间发生松动,从而将透镜从镜框上拆除下来。在上述AR眼镜的拆装过程中,由于刀片伸入的间隙是镜框的内壁面与透镜的外壁面之间形成的,所以并不会对镜框或透镜的表面造成刮伤,从而能够避免物料浪费,不仅如此,相对于现有技术中通过工人手动操作拆除透镜的方式,该透镜拆除装置还能够缩短拆卸时间,从而能够提高拆卸效率。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
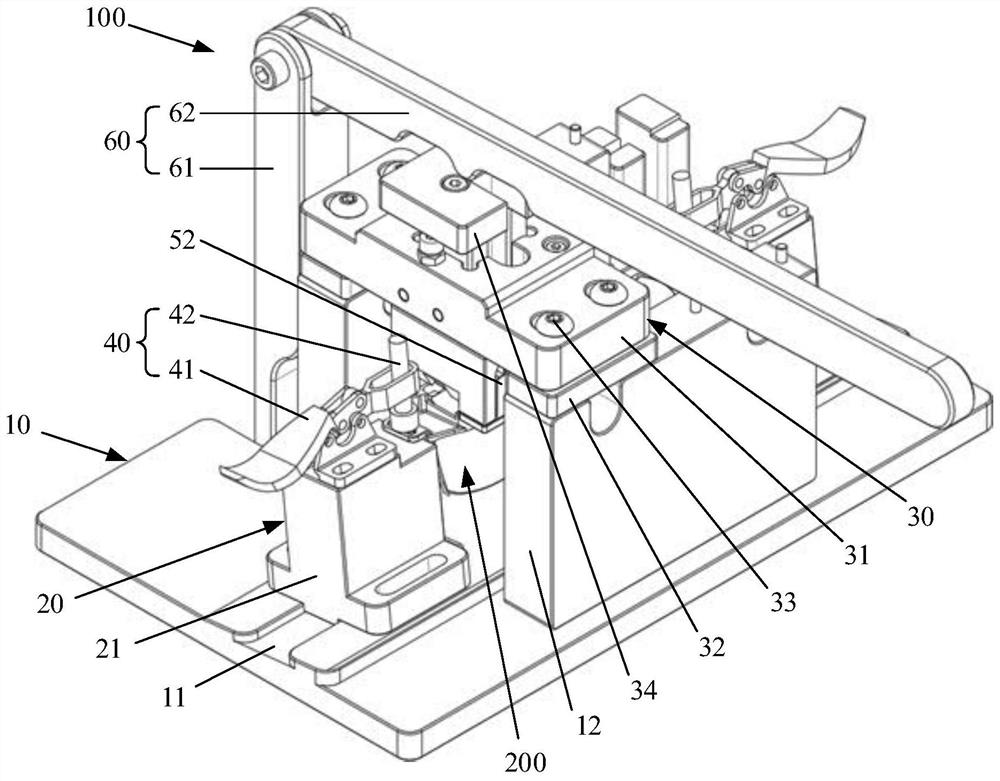
图1为本发明实施例提供的透镜拆除装置的结构示意图之一;
图2为本发明实施例提供的透镜拆除装置的结构示意图之二;
图3为本发明实施例提供的透镜拆除装置的结构示意图之三;
图4为本发明实施例提供的透镜拆除装置的结构示意图之四;
图5为本发明实施例提供的透镜拆除装置的结构示意图之五。
图标:100-透镜拆除装置;10-底座;11-安装槽;111-槽本体;112-连接板;113-连接孔;12-定位座;20-承载组件;21-安装座;211-座本体;212-连接块;213-连接槽;22-第一紧固件;23-支撑座;30-拆除组件;31-固定座;311-止挡柱;3111-柱本体;3112-限位件;32-定位板;33-第二紧固件;34-滑动座;40-夹紧组件;41-快速夹;42-夹紧块;50-刀片组件;51-固定块;52-滑动块;531-第一子刀片;532-第二子刀片;54-连接销轴;55-连接螺母;60-按压组件;61-第一杆体;62-第二杆体;200-AR眼镜;210-镜框;220-透镜。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请结合参照图1至图5,本申请实施例提供一种透镜拆除装置100,包括底座10、设置于底座10上的承载组件20和拆除组件30、设置于承载组件20上的夹紧组件40以及设置于拆除组件30上的刀片组件50,承载组件20用于承载AR眼镜200,夹紧组件40用于与承载组件20配合以将AR眼镜200夹持于夹紧组件40与承载组件20之间,刀片组件50的刀片与AR眼镜200的镜框210和透镜220之间的间隙呈相对设置,拆除组件30用于带动刀片组件50相对AR眼镜200运动,以将刀片组件50的刀片伸入间隙内。该透镜拆除装置100能够避免在AR眼镜200的拆装过程中刮伤透镜220,还能够提高拆卸效率。
需要说明的是,夹紧组件40设置于承载组件20上,夹紧组件40与承载组件20可以呈相对设置,以使当AR眼镜200放置于承载组件20上以后,AR眼镜200能够位于夹紧组件40与承载组件20之间。通过夹紧组件40与承载组件20之间的相对运动,以使夹紧组件40与承载组件20能够相互配合以将AR眼镜200夹持于夹紧组件40与承载组件20之间。由于承载组件20设置于底座10上,同时,考虑到承载组件20承载AR眼镜200时的稳定性和可靠性,因此,承载组件20相对底座10可以是固定不动的,所以,实际上是通过夹紧组件40朝向靠近承载组件20的一侧运动,以使AR眼镜200夹持于夹紧组件40与承载组件20之间。
由于刀片组件50设置于拆除组件30上,因此,拆除组件30能够带动刀片组件50进行运动。当AR眼镜200夹持于夹紧组件40与承载组件20之间以后,拆除组件30在外力作用下相对AR眼镜200运动,能够带动刀片组件50相对AR眼镜200运动。又由于刀片组件50的刀片与AR眼镜200的镜框210与透镜220之间的间隙呈相对设置,因此,刀片组件50的刀片能够伸入AR眼镜200的镜框210与透镜220之间的间隙内,以使镜框210与透镜220之间发生松动,从而将透镜220从镜框210上拆除下来。
在上述AR眼镜200的拆装过程中,由于刀片伸入的间隙是镜框210的内壁面与透镜220的外壁面之间形成的,所以并不会对镜框210或透镜220的表面造成刮伤,从而能够避免物料浪费,不仅如此,相对于现有技术中通过工人手动操作拆除透镜220的方式,该透镜拆除装置100还能够缩短拆卸时间,从而能够提高拆卸效率。
值得注意的是,关于刀片组件50的刀片的具体数量,本领域技术人员应当能够根据实际情况进行合理的选择和设计,这里不作具体限制。示例地,刀片的数量可以为一个或多个,当刀片的数量为多个时,刀片可以沿透镜220的外缘的不同方向设置,相较于刀片的数量为一个的方式,刀片的数量为多个的方式能够更加容易、更加快速地将透镜220从镜框210上拆除下来。
如上所述,该透镜拆除装置100包括底座10、设置于底座10上的承载组件20和拆除组件30、设置于承载组件20上的夹紧组件40以及设置于拆除组件30上的刀片组件50,承载组件20用于承载AR眼镜200,以为AR眼镜200提供放置平台,夹紧组件40用于与承载组件20配合以将AR眼镜200夹持于夹紧组件40与承载组件20之间,以使AR眼镜200能够稳定可靠地固定于夹紧组件40与承载组件20之间,刀片组件50的刀片与AR眼镜200的镜框210和透镜220之间的间隙呈相对设置,拆除组件30用于带动刀片组件50相对AR眼镜200运动,以将刀片组件50的刀片伸入间隙内,以使镜框210与透镜220之间发生松动,从而将透镜220从镜框210上拆除下来。在上述AR眼镜200的拆装过程中,由于刀片伸入的间隙是镜框210的内壁面与透镜220的外壁面之间形成的,所以并不会对镜框210或透镜220的表面造成刮伤,从而能够避免物料浪费,不仅如此,相对于现有技术中通过工人手动操作拆除透镜220的方式,该透镜拆除装置100还能够缩短拆卸时间,从而能够提高拆卸效率。
在上述AR眼镜200的拆装过程中,为了将刀片组件50的刀片与AR眼镜200的镜框210和透镜220之间的间隙精确对准,如图1和图2所示,在本实施例中,底座10上设置有安装槽11,承载组件20包括安装座21和第一紧固件22,安装座21容置于安装槽11内,第一紧固件22依次穿过安装座21和安装槽11并抵持于底座10内,以使安装座21与安装槽11固定连接。
具体地,安装槽11包括槽本体111以及设置于槽本体111相对两侧的连接板112,连接板112上设置有连接孔113,安装座21包括座本体211以及设置于座本体211相对两侧的连接块212,连接块212上设置有连接槽213,座本体211容置于槽本体111内,第一紧固件22依次穿过连接槽213和连接孔113并抵持于底座10内,以使连接块212与连接板112固定连接。示例地,槽本体111的长度方向沿该透镜拆除装置100的长度方向(或者说,沿X轴方向)排布。
这样一来,沿该透镜拆除装置100的长度方向(或者说,沿X轴方向),安装座21可以灵活地容置于安装槽11内的任意位置,当安装座21在安装槽11内移动至预设位置后,再将第一紧固件22依次穿过连接槽213和连接孔113并抵持于底座10内,以使连接块212与连接板112固定连接,从而实现安装座21与安装槽11之间的固定连接,进而能够避免由于承载组件20相对底座10的位置不够准确而导致的刀片与间隙未能对准。
此外,上述承载组件20相对底座10可以灵活调节位置的方式,还可以使得承载组件20能够稳定可靠地承载不同长度的AR眼镜200,从而提高该透镜拆除装置100的适用性。
值得注意的是,连接槽213的两个端部会对安装座21与安装槽11的相对位置造成限定,也就是说,连接槽213的两个端部会对承载组件20所能够承载的AR眼镜200的长度造成限定,因此,关于连接槽213的具体长度(即两个端部的具体位置),本领域技术人员应当能够根据实际情况进行合理的选择和设计,这里不作具体限制。
如图2和图5所示,在本实施例中,安装槽11包括两个,两个安装槽11呈相对且间隔设置,承载组件20的安装座21也可以包括两个,两个安装座21分别对应容置于两个安装槽11内,以使沿该透镜拆除装置100的长度方向(或者说,沿X轴方向),安装座21均可以灵活地容置于安装槽11内的任意位置。当然,在其他实施例中,还可以是一个固定不动,另一个灵活可调,这里不作具体限制。
除此以外,由于AR眼镜200的镜框210一般在中间会设置有对应鼻梁的凹陷部,因此,如图2和图5所示,承载组件20还包括支撑座23,支撑座23固定设置于两个安装槽11之间,安装座21和支撑座23共同配合承载AR眼镜200。如图5所示,支撑座23的高度可以略低于安装座21的高度,以与AR眼镜200的镜框210的形状相匹配。
如图1、图2、图3和图5所示,在本实施例中,夹紧组件40包括固定设置于安装座21上的快速夹41以及与快速夹41固定连接的夹紧块42,按压快速夹41的手柄,可使夹紧块42朝向靠近安装座21的方向运动,以将AR眼镜200夹持于夹紧块42与安装座21之间。
需要说明的是,由于快速夹41并不作为本申请的主要发明点,因此,这里对快速夹41的结构不进行过多的解释说明,本领域技术人员应当可以根据实际需求合理调用现有技术中的快速夹,从而以实现本申请所需的功能。现有技术中的快速夹包括但不限于垂直式快速夹钳、水平式快速夹钳、推拉式快速夹钳、门闩式快速夹钳、挤压钳式快速夹钳、凸轮式快速夹钳、多功能组立式快速夹钳、鲤鱼钳式快速夹钳、C型钳、F型钳、气动快速夹钳等。此外,由于AR眼镜200的镜框210所能被夹持的部分较小,所以,夹紧块42可以为现有技术中的螺钉,这里不作具体限制。
在上述AR眼镜200的拆装过程中,为了将刀片组件50的刀片与AR眼镜200的镜框210和透镜220之间的间隙精确对准,如图1和图2所示,在本实施例中,拆除组件30包括固定座31、定位板32和第二紧固件33,第二紧固件33穿过固定座31抵持于定位板32内,以使固定座31与定位板32固定连接;底座10上设置有定位座12,定位座12上设置有定位柱,定位板32上设置有定位孔,定位柱容置于定位孔内,以使定位板32与定位座12定位安装。
其中,固定座31与定位板32之间的相对位置灵活可调的方式,可以参考安装座21与安装槽11之间的相对位置灵活可调的方式进行设计,示例地,固定座31上设置有凹槽,且凹槽的长度方向沿该透镜拆除装置100的宽度方向(或者说,沿Y轴方向)排布。
这样一来,沿该透镜拆除装置100的宽度方向(或者说,沿Y轴方向),固定座31与定位板32之间的相对位置可以进行灵活调节,当固定座31相对定位板32调节至预设位置后,再将第二紧固件33穿过固定座31抵持于定位板32内,以使固定座31与定位板32固定连接,从而使得当固定座31与定位板32形成的整体再与底座10上的定位座12定位安装后,拆除组件30能够相对底座10直接安装到位,从而避免由于拆除组件30相对底座10的位置不够准确而导致的刀片与间隙未能对准。
此外,上述拆除组件30相对底座10可以灵活调节位置的方式,还可以使得拆除组件30能够稳定可靠地拆除不同宽度的AR眼镜200,从而进一步提高该透镜拆除装置100的适用性。
如图1、图3和图5所示,在本实施例中,拆除组件30还包括滑动设置于固定座31内的滑动座34,刀片组件50设置于滑动座34上,固定座31上设置有止挡柱311,止挡柱311用于对滑动座34相对固定座31的运动进行止挡,以对刀片组件50相对AR眼镜200的运动进行限位。
需要说明的是,滑动座34相对固定座31朝向靠近AR眼镜200的一侧运动,能够带动刀片组件50相对AR眼镜200朝向靠近AR眼镜200的一侧运动,以将刀片组件50的刀片伸入AR眼镜200的镜框210和透镜220之间的间隙内。为了对刀片伸入间隙内的深度进行限定,以避免刀片过度的伸入间隙内,不仅不能够使得镜框210与透镜220之间发生松动,反而可能卡死在镜框210与透镜220之间,或者,避免刀片伸入间隙内的深度不够,不足以施加足够的外力使得镜框210与透镜220之间发生松动,为此,固定座31上设置有止挡柱311,当滑动座34的下表面与止挡柱311的上表面之间发生抵持时,滑动座34相对固定座31不再继续滑动,以使刀片不再继续伸入间隙内,因此,滑动座34的下表面与止挡柱311的上表面之间的间距h,即为刀片能够伸入间隙内的深度。关于该间距h的具体数值,本领域技术人员应当能够根据实际情况进行合理的选择和设计,这里不作具体限制。
具体地,如图3所示,止挡柱311包括柱本体3111以及设置在柱本体3111上的限位件3112,限位件3112相对柱本体3111运动,以对柱本体3111相对固定座31运动进行限位,以使柱本体3111相对固定座31只能运动至限位件3112的下表面与固定座31的上表面抵持为止。
需要说明的是,限位件3112相对柱本体3111运动,调节了柱本体3111与固定座31之间的相对深度,同时,还调节了柱本体3111的上表面与限位件3112的下表面之间的距离,从而调节了滑动座34的下表面与止挡柱311的上表面之间的间距h。当柱本体3111的上表面与限位件3112的下表面之间的距离增大时,滑动座34的下表面与止挡柱311的上表面之间的间距h减小;当柱本体3111的上表面与限位件3112的下表面之间的距离减小时,滑动座34的下表面与止挡柱311的上表面之间的间距h增大。
这样一来,沿该透镜拆除装置100的高度方向(或者说,沿Z轴方向),由于止挡柱311与固定座31之间的相对深度可以进行灵活调节,当止挡柱311相对固定座31调节至预设位置后,滑动座34的下表面与止挡柱311的上表面之间的间距h达到预设数值,以使刀片能够伸入间隙内的深度达到预设数值,从而避免刀片过度的伸入间隙内,不仅不能够使得镜框210与透镜220之间发生松动,反而可能卡死在镜框210与透镜220之间,或者,避免刀片伸入间隙内的深度不够,不足以施加足够的外力使得镜框210与透镜220之间发生松动。
如图4和图5所示,在本实施例中,刀片组件50包括固定设置于滑动座34上的固定块51、滑动设置于固定块51内的滑动块52以及刀片,刀片包括固定设置于固定块51上的第一子刀片531以及固定设置于滑动块52上的第二子刀片532,第一子刀片531和第二子刀片532呈相对且间隔设置,滑动块52相对固定块51运动,以调节第二子刀片532与第一子刀片531之间的间距。
具体地,固定块51上可以设置连接销轴54,滑动块52穿设于连接销轴54外,以使滑动块52能够相对固定块51滑动,连接销轴54上还可以套设有至少两个连接螺母55,以对滑动块52相对固定块51的滑动进行限位。当第二子刀片532与第一子刀片531之间的间距调节至预设数值以后,可以通过拧紧连接螺母55以使滑动块52与固定块51之间的间距不再继续改变,从而使得第二子刀片532与第一子刀片531之间的间距也不再继续变化,进而避免该透镜拆除装置100在使用过程中,由于第二子刀片532与第一子刀片531之间的间距发生改变,导致拆除组件30带动刀片组件50运动时刀片刮伤镜框210或透镜220的表面。
如图1至图5所示,在本实施例中,该透镜拆除装置100还包括按压组件60,按压组件60包括第一杆体61以及与第一杆体61的一端铰接的第二杆体62,第一杆体61的另一端与底座10固定连接,第二杆体62与滑动座34抵持,按压第二杆体62的另一端以使滑动座34相对固定座31运动,以通过第二杆体62向拆除组件30施加外力作用,从而便于控制、观测滑动座34相对固定座31的运动。其中,第一杆体61的另一端与底座10可以卡接,以使按压组件60可以在不需要时从底座10上拆除下来。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。