一种新型约束马甲定位系统架构
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及医疗设备技术领域,具体为一种新型约束马甲定位系统架构。
背景技术
临床中目前一般通过绑带对患者身体和手部进行限位约束,这种约束方式使用不便且容易对患者身体造成损伤或擦伤;此外此类约束的结构比较简单,对于一些患者,如躁郁症患者,存在很多需求无法满足。
发明内容
本发明的目的在于提供一种新型约束马甲定位系统架构,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种新型约束马甲,包括约束马甲,所述约束马甲两侧肩部均设有软垫,所述约束马甲正面腰部设有一对约束袋,所述约束袋袋口处设有腕部约束环,所述约束马甲背面设有拉链,所述拉链顶部设有定位移动端。
进一步的,所述定位移动端内至少包括STM32最小系统、定位模块、无线模块A。
进一步的,所述腕部约束环的环内圈设有放电电极,所述腕部约束环内部至少设有51单片机和无线模块B。
进一步的,所述系统构架还包括院内系统、定位终端和家属端。
进一步的,所述系统构架中的定位终端为多个,所述定位终端通过无线连接约束马甲上的定位移动端,所述定位移动端输出连接院内系统,所述院内系统通过无线连接腕部约束环。
进一步的,一种新型约束马甲定位系统架构,所述系统的工作流程至少包括以下步骤:
一、在院内的患者可移动区域数量大于3的定位终端,定位终端通过无线与定位移动端交互数据,通过数据传输时间差和传输速度计算定位终端与定位移动端的距离;
二、采用三球交汇定位原理,确定定位移动端的空间坐标,多余3个的定位终端的距离数据用于修正三球交汇的定位准确度;
三、实时的将位置信息发往院内系统,并进行系统判定,若定位移动端越出判断区域,则给院内系统发出警报,并控制腕部约束环上的放电电极给予刺激,同时及时将护理信息发送至家属端。
进一步的,多个所述定位终端输出连接至定位模块,所述定位模块输出连接STM32最小系统,所述STM32最小系统输出连接至无线模块A,所述无线模块A分别输出连接至院内系统和家属端,所述无线模块A还输出连接无线模块B,所述无线模块B输出连接51单片机,所述51单片机输出连接放电电极。
与现有技术相比,本发明的有益效果是:本设计下采用马甲式的约束结构,保证了约束的充分性和舒适性;约束带的设计使得约束结构柔性化更高,内置的定位系统可实时获取被约束者的位置,如果被约束者越过允许范围,则会发出警报,同时腕部约束环会发出电流刺激;此外定位系统的实时位置会被更新至院内系统和家属端,以便于护理人员和家属及时掌握情况。
附图说明
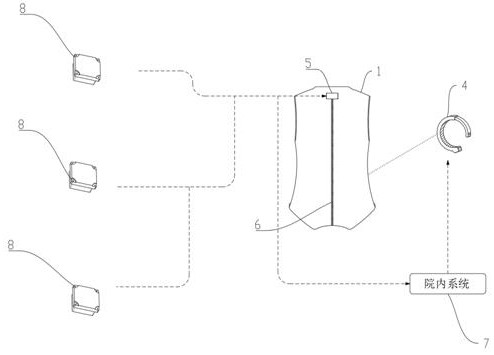
图1为本发明中约束马甲定位系统结构图;
图2为本发明中约束马甲的正面结构示意图;
图3为本发明中约束马甲的背面结构示意图;
图4为本发明中腕部约束环的结构示意图;
图5为本发明中三球交汇定位结构示意图;
图6为本发明中电原理示意图。
图中:1、约束马甲;2、软垫;3、约束袋;4、腕部约束环;41、放电电极;42、51单片机;43、无线模块B;5、定位移动端;51、定位模块;52、STM32最小系统;53、无线模块A;6、拉链;7、院内系统;8、定位终端;9、家属端。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、 “右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“ 顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、 “第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1-6,本发明提供一种技术方案:
一种新型约束马甲,包括约束马甲1,约束马甲1两侧肩部均设有软垫2,约束马甲1正面腰部设有一对约束袋3,约束袋3袋口处设有腕部约束环4,约束马甲1背面设有拉链6,拉链6顶部设有定位移动端5。软垫2用于保证约束时对被约束者肩部的缓冲,保证舒适感。
定位移动端5内至少包括STM32最小系统52、定位模块51、无线模块A53。
腕部约束环4的环内圈设有放电电极41,腕部约束环4内部至少设有51单片机42和无线模块B43。
系统构架还包括院内系统7、定位终端8和家属端9。
系统构架中的定位终端8为多个,定位终端8通过无线连接约束马甲1上的定位移动端5,定位移动端5输出连接院内系统7,院内系统7通过无线连接腕部约束环4。
一种新型约束马甲定位系统架构,系统的工作流程至少包括以下步骤:
一、在院内的患者可移动区域数量大于3的定位终端8,定位终端8通过无线与定位移动端5交互数据,通过数据传输时间差和传输速度计算定位终端8与定位移动端5的距离;
二、采用三球交汇定位原理,请参阅图4,确定定位移动端5的空间坐标,多余3个的定位终端8的距离数据用于修正三球交汇的定位准确度;
三、实时的将位置信息发往院内系统7,并进行系统判定,若定位移动端5越出判断区域,则给院内系统7发出警报,并控制腕部约束环4上的放电电极41给予刺激,同时及时将护理信息发送至家属端9。
多个定位终端8输出连接至定位模块51,定位模块51输出连接STM32最小系统51,STM32最小系统51输出连接至无线模块A53,无线模块A53分别输出连接至院内系统7和家属端9,无线模块A53还输出连接无线模块B43,无线模块B43输出连接51单片机42,51单片机42输出连接放电电极41。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种新型约束马甲定位系统架构
- 一种新型约束马甲