一种全自动化电线立体仓库
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及立体仓库技术领域,具体涉及一种全自动化电线立体仓库。
背景技术
随着制造产业的发展,立体仓库作为制造业快速发展中的产物越来越受人瞩目,能够实现占地面积小有效利用空间的目的,应用越加广泛。
现有的用于存储电线的立体仓库使用十分不便,在使用时,往往因为货物种类和数量的繁多而导致立体仓库内货物堆放不合理,出现堆放杂乱,不能够在最大程度上利用立体仓库空间,同时需要人工将物品放入的立体仓库内较高的位置,在存货和取货时比较困难,增加了存取货的时间和周期,既浪费大量的时间,又浪费人力,因此导致浪费大量的人力财力,增加货物储藏的成本;立体仓库内容纳腔的大小一定,无法很好的适应不同规格型号物品的摆放。
发明内容
为了克服上述技术缺陷,本发明提供一种全自动化电线立体仓库,在电线生产出来时能够直接流入立体仓库并实行自动化管理,自动的进行进料存储摆放和按需取货出料,提高了电线存储的效率,节约了时间,有效的减少了电线存储时的所带来的人力成本。
为了解决上述问题,本发明按以下技术方案予以实现的:
本发明所述一种全自动化电线立体仓库,包括用于将电线进行运送的运输系统以及用于将电线进行储存和发货的立体仓库,所述立体仓库按照电线的型号规格在高度方向上等间隔分设有多层,每一层设有多个分区,所述立体仓库的每一分区内均设有储存单元和发货单元。
作为本方案的进一步改进,所述运输系统按电线的运送方向依次包括生产机台机械臂,第一道输送带,第一道扫描器,第一道万向轮,第二道输送带,第二道扫描器,第二道万向轮以及第三道输送带。
作为本方案的进一步改进,所述储存单元按电线的流动方向依次包括进货输送带、进货扫描器、进货机械臂、进货托盘、进货运输机器人以及货物储存区。
作为本方案的进一步改进,所述发货单元按电线的流动方向依次包括发货机械臂、发货托盘、发货运输机器人以及发货输送带。
作为本方案的进一步改进,所述第一道万向轮和第二道万向轮分别根据第一道扫描器和第二道扫描器扫描所获得的信息自动进行方向的调整,保证电线能进入正确的运输通道。
作为本方案的进一步改进,所述货物储存区根据货物量的多少进行滚动式的调整,保证货物按顺序摆放和发货,所述的进货机械臂根据进货扫描器获得的信息以将电线放入指定的进货托盘上。
作为本方案的进一步改进,所述进货扫描器扫描电线上的标签,完成信息的录入和传输,保证进货机械臂和进货运输机器人获得正确的信息,并完成产品的入库。
作为本方案的进一步改进,所述进货运输机器人根据进货扫描器获得的信息以及进货机械臂放入指定进货托盘上的电线的数量进行运输,保证电缆进入正确的存储位置。
作为本方案的进一步改进,所述发货机械臂接收到外部的发货信息后按照电线的存储位置进行拣货,放入指定的发货托盘中,发货机械臂内设有扫描器,完成对所拣电线的信息扫描,并完成出库的信息录入。
作为本方案的进一步改进,所述发货运输机器人根据发货机械臂拣货完毕的信息将发货托盘运走放入发货输送带上,完成发货。
与现有技术相比,本发明的有益效果是:
本发明通过设置与生产机台相接的运输系统,可将刚生产出来的电线进行分类运输,最终运输至立体仓库,立体仓库设有多层,每层设有多个分区,分区内设有储存单元和发货单元,储存单元可对不同型号规格的电线进行有序储存,当接收到发货信息时发货单元可精确拣取对应的电线进行发货,整个过程都是全自动化管理的,自动的完成入库和出库,根据具体要求和实际情况,提高储存和发货的效率,无需人工操作,避免了人工分类和拣货过程中出现的人为失误,减少货物存储时的人力财力,降低货物储藏时的成本,保证了储存和发货的准确率;充分利用了立体仓库的垂直空间,单位面积的存储量远大于传统仓库,提高空间利用率。
附图说明
下面结合附图对本发明的具体实施方式作进一步详细的说明,其中:
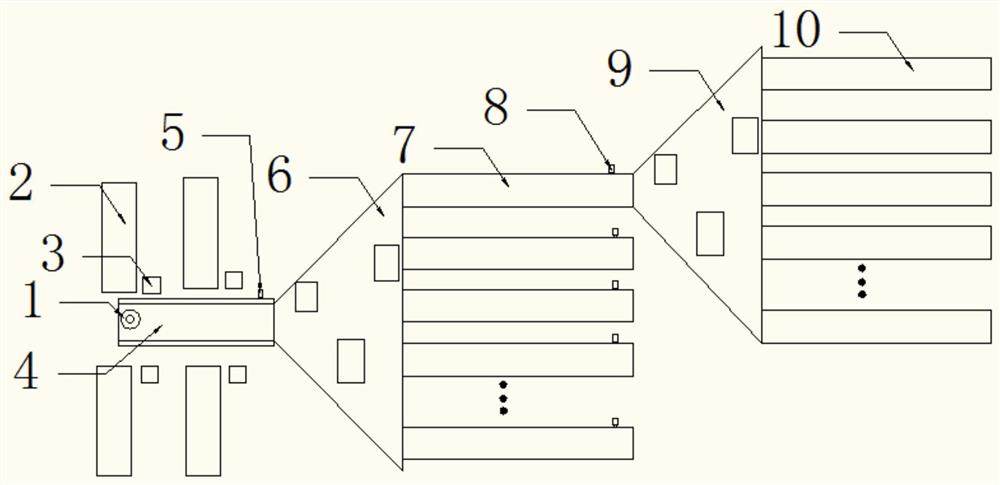
图1是本发明中运输系统的示意图;
图2是本发明中立体仓库的示意图;
图3是本发明立体仓库中储存单元和发货单元的示意图;
图中:1、电线;2、生产机台;3、生产机台机械臂;4、第一道输送带;5、第一道扫描器;6、第一道万向轮;7、第二道输送带;8、第二道扫描器;9、第二道万向轮;10、第三道输送带;11、立体仓库;12、进货扫描器;13、进货输送带;14、进货托盘;15、进货运输机器人;16、货物储存区;17、进货机械臂;18、发货托盘;19、发货机械臂;20、发货运输机器人;21、发货输送带。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
如图1-3所示,本发明所述的一种全自动化电线1立体仓库11,包括用于将电线1进行运送的运输系统以及用于将电线1进行储存和发货的立体仓库11。
每一捆电线1从生产机台2生产出来并打好包装后,外部均贴设有二维码标签,以利于后续对其进行识别储存。运输系统按电线1的运送方向依次包括生产机台机械臂3,第一道输送带4,第一道扫描器5,第一道万向轮6,第二道输送带7,第二道扫描器8,第二道万向轮9以及第三道输送带10。多台生产机台2有序分布在第一道输送带4长度方向上的两侧,每一生产机台2旁均安装有生产机台机械臂3,生产机台机械臂3用于将生产机台2生产出来的电线1移动至第一输送带上进行下一步运送。电线1流动到接近第一输送带末端时,在其上安装的第一道扫描器5即可对电线1上的二维码标签进行扫描识别,进而调整第一道万向轮6上各滚轮的转动方向,保证电线1在其上进入正确的第二道输送带7上。第一道万向轮6首端与第一道输送带4末端相连接,第一道万向轮6末端连接有多台第二道输送带7,第二道输送带7和第三道输送带10的台数根据电线1的型号规格进行确定。每一第二道输送带7接近末端处安装有第二道扫描器8,可对电线1进行二次扫描识别,以调整第二道万向轮9上各滚轮的转动方向,保证电线1后续进入正确的第三道输送带10上。每一第二道输送带7末端与第二道万向轮9的首端相连接,每一第二道万向轮9末端均连接有多台第三道输送带10,因而通过第一道万向轮6与第二道万向轮9可对电线1进行两个层级的分类,可分类的电线1种类多。
从第三道输送带10上流出来的电线1即可进入立体仓库11内,立体仓库11按照电线1的型号规格在高度方向上安装电线1的型号等间隔分设有多层,每层对应一个型号,而每一层按照规格分为多个分区,立体仓库11的每一层的每一分区内均设有储存单元和发货单元。
储存单元按电线1的流动方向依次包括进货输送带13、进货扫描器12、进货机械臂17、进货托盘14、进货运输机器人15以及货物储存区16。第三道输送带10的电线1分别进入各自对应的进货输送带13上,设于进货输送带13前端的进货扫描器12可对可对进入电线1上的二维码标签进行扫描识别,进行信息录入及传输,保证进货机械臂17和进货运输机器人15获得正确的信息,并完成产品的入库。而后电线1在进货输送带13上流动的过程中,设于进货输送带13一端的进货机械臂17根据流入电线1的识别信息将其移动至对应的进货托盘14上,进货托盘14沿进货输送带13的长度方向上等间隔设置有多个,分别对应放置不同类别的电线1。进货运输机器人15得到进货托盘14上电线1的放置信息后将电线1放入货物储存区16中指定的储存位置。货物储存区16根据货物量的多少进行滚动式的调整,保证货物按顺序摆放和发货。进货运输机器人15根据进货扫描器12获得的信息以及进货机械臂17放入指定进货托盘14上的电线1的数量进行运输,保证电线1进入正确的储存位置。
在接收到外部的发货信息时,发货单元即可从储存单元处将指定的电线1拾取出来,发货单元按电线1的流动方向依次包括发货机械臂19、发货托盘18、发货运输机器人20以及发货输送带21。设置在货物储存区16一端发货机械臂19首先接收到发货信息,从货物储存区16内将指定的电线1拾取出并放置在发货托盘18上,在发货机械臂19上设有扫描器,可对拾取出的电线1进行扫描登记,完成出库信息录入。发货运输机器人20接受到发货机械臂19拣货完毕的信息,将置于发货托盘18上的电线1进一步移动至发货输送带21上流出,最终完成发货。
应理解,在本实施例中提及的生产机台机械臂3、第一输送带、第一道扫描器5、第一道万向轮6、第二道输送带7、第二道扫描器8、第二道万向轮9、第三道输送带10、进货扫描器12、进货输送带13、进货运输机器人15、进货机械臂17、发货机械臂19、发货运输机器人20以及发货输送带21均可利用现有技术条件实现,因而不对其工作原理进行一一赘述。
工作原理:
电线1通过生产机台2生产完成并做好包装,电线1外包装上贴有代表本电线信息的二维码标签,通过生产机台机械臂3放入第一道输送带4上,通过第一道输送带4的运输,到达第一道扫描器5,通过第一道扫描器5扫描电线1上的二维码,将信息传递给第一道万向轮6,完成产品型号的识别和分类,通过第一道万向轮6的方向控制将相应的型号分类进入相应的第二道输送带7,通过第二道输送带7的运输,到达第二道扫描器8,通过第二道扫描器8扫描电线1上的二维码,将信息传递给第二道万向轮9,完成产品规格的识别和分类,通过第二道万向轮9的方向控制将相应的规格分类进入相应的第三道输送带10,通过第三道输送带10进入立体仓库11。
立体仓库11按照型号分层,每层对应一个型号,而每一层按照规格分为多个分区,每个分区包括储存系统和发货系统。
电线1通过第三道输送带10进入立体仓库11后,首先进入进货输送带13,在进入口有进货扫描器12,通过进货扫描器12扫描电线1上的二维码,完成信息的录入,完成产品入库,并将信息传递给进货机械臂17,进货机械臂17根据接收的信息将电线1放入指定的进货托盘14上,并将信息传递给进货运输机器人15,进货运输机器人15根据进货机械臂17放货的数量和型号规格进行运输,并将产品放入货物储存区16中指定的储存位置。
发货机械臂19接收到公司发货的指令信息后,按照货物储存区16中指定的储存位置选择对应的电线1,完成拣货,发货机械臂19含有扫描系统,可以对拣出的电线1进行扫描,完成电缆的出库,并将电线1放入指定的发货托盘18上,发货运输机器人20根据发货机械臂19拣货完毕的信息将发货托盘18运走放入发货输送带21上,完成发货。
本实施例所述一种全自动化电线立体仓库的其它结构参见现有技术。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,故凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种全自动化电线立体仓库
- 一种全自动化电线立体仓库