一种无人潜航器布放回收系统及布放回收方法
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及无人潜航器布放和回收技术领域,具体涉及一种无人潜航器布放回收系统及布放回收方法。
背景技术
无人潜航器作为海洋探测的重要工具,近年来越来越受到世界各国的重视;无人潜航器在执行任务时一般由母船释放到任务水域中,任务执行完毕后进行回收;无人潜航器的布放和回收一直以来是研究的重要课题。
目前基于半潜船的无人潜航器布放回收系统有以下不足:
1)需要人力参与,布放回收时通常为人工布放,完成任务后无人潜航器现浮出水面,然后再进行人工打捞,操作人员作业时安全性低、风险高;
2)半潜船上缺乏相应的快速锁紧无人潜航器的装置,无人潜航器在半潜船上的松开和固定过程繁琐且固定效果差;
3)半潜船机动性能不好,同时对海况要求较高,作业效率不高。
发明内容
为解决现有技术中存在的问题,本发明提供了一种基于半潜式无人艇的,能够自动布放回收且布放回收效率高的无人潜航器布放回收系统及布放回收方法。
为实现上述目的,本发明的技术方案为:
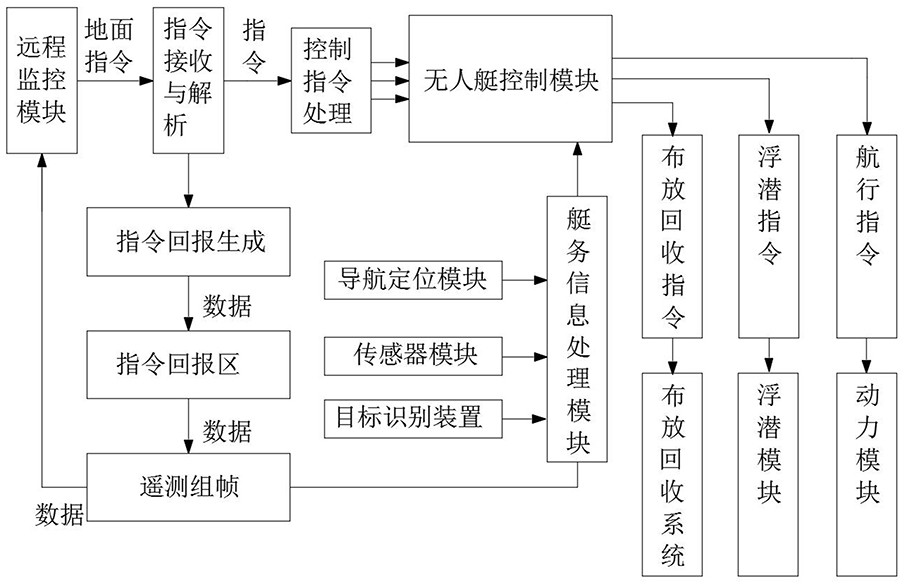
一种无人潜航器布放回收系统,包括设置在半潜式无人艇控制室内的无人艇控制模块,无人艇控制模块连接有布放回收装置、浮潜模块和动力模块,布放回收装置设置在半潜式无人艇的甲板上的中间位置,布放回收装置上设有定位装置,定位装置设置在布放回收装置的中间位置;无人艇控制模块还连接有艇务信息处理模块,艇务信息处理模块连接有导航定位模块、目标识别装置和传感器模块;无人潜航器控制室内还设有潜航器控制模块,地面设有远程监控模块,潜航器控制模块、无人艇控制模块和艇务信息处理模块通过通信模块与远程监控模块进行实时通信,远程监控模块上还设有人机交互界面,人机交互界面实时显示各装置的运行状态,用户可在人机交互界面下达控制指令。
进一步地,布放回收装置包括一对沿半潜式无人艇宽度方向平行设置的导轨和一对垫块,垫块上设有与无人潜航器配合的弧形凹槽,导轨和垫块均设置在半潜式无人艇的甲板上;任一导轨上均滑动连接有一对对称设置的锁紧装置和一对对称设置的辅助夹紧装置,任一锁紧装置均包括与导轨滑动连接的支架,支架竖直设置,支架底端设有驱动装置,支架上设有水平设置的叶片支撑杆,叶片支撑杆呈圆柱形,叶片支撑杆远离支架的一端设有锁紧叶片;锁紧叶片的竖向截面呈圆弧状,锁紧叶片外凸的外弧面为具有弹性的金属层,锁紧叶片的内凹的内弧面为与无人潜航器配合的软质橡胶层,叶片支撑杆设置在锁紧叶片外弧面的金属层上,叶片支撑杆与锁紧叶片通过螺栓或插接的方式可拆卸连接。
进一步地,辅助夹紧装置包括对称设置在锁紧叶片上下两侧的夹板,位于锁紧叶片上方的为上夹板,位于锁紧叶片下方的为下夹板,上夹板和下夹板均垂直于竖直面设置;任一夹板均通过设置在夹板一端的传动轴与支架转动连接,传动轴固定在夹板上,支架上设有与传动轴配合的轴承;夹板为矩形板,矩形板远离传动轴的一端均布有齿,矩形板背对锁紧叶片的一侧设有日字形的加强框;夹板或传动轴上连接有动力机构,上夹板和下夹板在动力机构的作用下绕传动轴在竖直面内转动,同步靠近或远离锁紧叶片,动力机构设置在机架上。
进一步地,动力机构与传动轴连接;任一传动轴的中间位置固定有一对垂直于传动轴的压板,压板为长条形的板状结构,压板一端固定在传动轴上,沿压板长度方向,压板上设有长条形的传动孔,传动孔中滑动连接有一根竖直设置的T形杆,T形杆由相互垂直的横杆和竖杆组成,T形杆的竖杆设置在两个压板之间,T形杆的横杆设置在传动孔中,横杆可在传动孔中滑动;动力机构为夹紧液压缸,夹紧液压缸竖直设置在支架上,T形杆的竖杆固定在夹紧液压缸的活塞杆上并与活塞杆平行设置。
进一步地,动力机构与夹板连接;加强框上设有矩形块,矩形块上设有倒T形槽,倒T形槽内滑动连接有水平设置的T形杆;动力机构为夹紧液压缸,夹紧液压缸水平设置在支架上,夹紧液压缸的活塞杆与T形杆的竖杆平行设置。
进一步地,任一导轨均为水平设置的长条形的矩形条,沿矩形条的长度方向,矩形条上设有倒T形的导向槽,任一支架均包括与导向槽滑动连接的倒T形的滑块,滑块顶端伸出导轨连接有底板,底板上设有竖直设置的支撑杆,支撑杆为中空的方管,支撑杆一侧设有加强筋;夹紧液压缸、叶片支撑杆、传动轴均设置在支撑杆上。
进一步地,驱动装置为设置在甲板上的锁紧液压缸或设置在支架上的驱动电机,驱动装置为锁紧液压缸时锁紧液压缸的活塞杆与滑块连接,活塞杆的伸缩方向与导轨的长度方向同向;驱动装置为驱动电机时,驱动电机竖直设置在底板上,导轨上设有与驱动电机配合的齿条,齿条竖直设置并均布在导轨一侧。
一种利用上述无人潜航器布放回收系统进行的无人潜航器布放回收方法,包括布放过程和回收过程;
布放过程包括以下步骤:
S1.操作人员通过远程监控模块向半潜式无人艇发送指令,给出无人潜航器要下潜的任务水域的经纬度信息;半潜式无人艇接收指令,半潜式无人艇的艇务信息处理模块根据接收到的指令规划航线,无人艇控制模块根据航线控制载有无人潜航器的半潜式无人艇航行至任务区域;
S2.半潜式无人艇的导航定位模块自动识别是否到达任务水域,到达任务水域后,半潜式无人艇控制模块通过浮潜模块调整半潜式无人艇艇身压载水量,使之下潜至水面没过无人潜航器的顶端,通过传感器模块判断是否到达设定的下潜深度,当达到设定的下潜深度时,布放回收装置动作,辅助夹紧装置的上夹片和下夹片同步转动,远离锁紧叶片;锁紧装置同步移动,远离无人潜航器,从而松开被夹紧的无人潜航器;
S3.操作人员通过远程监控模块上的人机交互界面向无人潜航器的潜航器控制模块发出相应的的控制指令,潜航器控制模块控制无人潜航器上浮,然后驶离甲板,或控制无人潜航器直接前进驶离甲板;
S4.潜航器控制模块控制无人潜航器下潜执行任务;
S5.半潜式无人艇上浮至正常航行深度,等待下一步指令;
回收过程包括以下步骤:
P1.无人潜航器完成水下作业任务后上浮至水面,并将所处位置的经纬度信息通过通信模块发送给远程监控模块,远程监控模块将半潜式无人艇所处位置的经纬度信息转发至半潜式无人艇;
P2.半潜式无人艇接收到无人潜航器的位置信息后,半潜式无人艇的艇务信息处理模块规划航线,并通过无人艇控制模块控制半潜式无人艇航行至目标位置;
P3.到达无人潜航器所在的位置区域后,目标识别装置对区域内的无人潜航器进行识别验证,验证通过后,半潜式无人艇的控制模块控制半潜式无人艇下潜,下潜深度需满足以下要求:下潜深度为潜航器底部距水面距离的二倍,但不能超过半潜式无人艇的最大下潜深度;
P4.无人潜航器航行至半潜式无人艇的甲板上方,并准确定位在半潜式无人艇的布放回收装置内;半潜式无人艇的布放回收装置启动,锁紧无人潜航器;
P5.半潜式无人艇上浮到正常的航行深度等待下一步指令;远程监控模块控制半潜式无人艇返航或执行下一个任务。
进一步地,步骤P4中,无人潜航器准确定位在布放回收装置的过程为:定位装置设置在布放回收装置的中轴线上,船尾设置必经点,必经点同样设置在布放回收装置的中轴线上,定位装置将布放回收装置的位置信息传送给艇务信息处理模块,艇务信息处理模块再转发给远程监控模块,远程监控模块再传送给无人潜航器;最后,远程监控模块发送控制指令,遥控潜航器先经过必经点再航行至目标位置,到达半潜式无人艇的甲板上方;远程监控模块实时监控半潜式无人艇甲板上的画面信息,并将画面信息实时显示在人机交互界面上。
进一步地,步骤P4中,锁紧无人潜航器的过程为:锁紧叶片内层和夹板与锁紧叶片配合的位置均设置有压力传感器,压力传感器将检测到的压力数据回传给远程监控模块,当叶片夹住无人潜航器时,远程监控模块通过回传的压力数据确定无人潜航器是否夹紧。
与现有技术相比,本发明的有益效果为:
(1)自动化远程操控,在恶劣环境下也能够进行工作,工作效率高;
(2)设计了布放回收装置;布放回收装置包括锁紧装置和辅助夹紧装置,锁紧装置限制无人潜航器在半潜式无人艇甲板上的水平移动,辅助夹紧装置限制了无人潜航器的竖向滑动,在海况恶劣的情况下保证了无人潜航器在半潜式无人艇上的稳定性,抗倾覆能力更强;通过设置在布放回收装置上的定位装置和传感器模块的配合使用,使无人潜航器能够自动、准确定位在布放回收装置内,能够自主完成无人潜航器的全自动布放与回收,极大地提高了工作效率,降低了人工操作的风险。
(3)导航定位模块可以获得半潜式无人艇的位置、姿态、速度等信息,方便对无人艇的控制;传感器模块可以对目标无人潜航器进行探测,对航行路线上的情况进行实时监测;远程监控模块可以对半潜式无人艇进行远程控制,控制更加安全便捷。
附图说明
图1为本发明的系统组成框图;
图2为本发明半潜式无人艇搭载无人潜航器的状态图;
图3为本发明半潜式无人艇未搭载无人潜航器的状态图;
图4为实施例1中布放回收装置的三维结构示意图;
图5为图4中A处的放大图;
图6为布放无人潜航器的流程图;
图7为回收无人潜航器的流程图;
图8为实施例3中辅助夹紧装置的局部三维结构示意图;
图9为实施例4中布放回收装置的三维结构示意图。
图中:半潜式无人艇1,无人潜航器2,垫块3,布放回收装置4,导轨401,滑块402,底板403,支撑杆404,下夹板405,叶片支撑杆406,加强框407,上夹板408,锁紧叶片409,夹紧液压缸410,传动轴411,压板412,T形杆413,加强筋414,驱动电机415,齿条416,锁紧液压缸417。
具体实施方式
为了使本领域技术人员能够更好的理解本发明的技术方案,下面结合附图对本发明作进一步的解释说明。
实施例1
参见图1-图5,一种无人潜航器布放回收系统:
包括设置在半潜式无人艇1控制室内的无人艇控制模块,无人艇控制模块连接有布放回收装置4、浮潜模块和动力模块,布放回收装置4设置在半潜式无人艇1的甲板上的中间位置,布放回收装置4上设有定位装置,定位装置设置在布放回收装置4的中间位置;无人艇控制模块还连接有艇务信息处理模块,无人艇控制模块主要用于:1)半潜式无人艇1的运动控制,2)半潜式无人艇1的浮潜控制;3)与艇务信息处理模块进行信息交互;艇务信息处理模块主要用于:1)数据接收与转发;2)指令的接收与解析;3)指令回报;4)半潜式无人艇1的航线规划;艇务信息处理模块连接有导航定位模块、目标识别装置和传感器模块,导航定位模块主要包括:陀螺仪、加速度计;陀螺仪和加速度计的作用是获得半潜式无人艇1的位置姿态速度信息,为无人艇控制模块和地面远程监控模块提供实时导航数据;传感器模块主要包括:雷达与声呐、深度传感器、压力传感器等,雷达与声呐的作用是:1)对无人潜航器2进行探测;2)对航线上的情况进行实时监测。
还包括设置在无人潜航器2控制室内的潜航器控制模块和设置在地面的远程监控模块,潜航器控制模块、无人艇控制模块和艇务信息处理模块通过通信模块与远程监控模块进行实时通信,通信模块包括:数据链路传输所需的天线、数据传输电台,设置在地面的数据接收机、地面电台、地面天线等;远程监控模块上还设有人机交互界面,人机交互界面实时显示各装置的运行状态,用户可在人机交互界面下达控制指令,远程监控模块的主要功能有:1)半潜式无人艇1自身状态、位置、速度、姿态信息、无人潜航器2的位置状态以及布放回收装置的状态的回报显示;2)遥控半潜式无人艇1按指定航行路线航行到达指定位置;3)遥控半潜式无人艇1上浮和下潜;4)遥控半潜式无人艇1上的布放回收装置;4)指导半潜式无人艇1返航;5)系统信息的存储。
布放回收装置4包括一对沿半潜式无人艇1宽度方向平行设置的导轨401,还包括一对垫块3,垫块3为矩形块,垫块3上设有与无人潜航器2配合的弧形凹槽,弧形凹槽内设有缓冲带,导轨401和垫块3均设置在半潜式无人艇1的甲板上;任一导轨401均为水平设置的长条形的矩形条,沿矩形条的长度方向,矩形条上设有倒T形的导向槽,矩形条一侧设有竖直设置的齿条416,齿条416均布在导轨401长度方向;任一导轨401上均滑动连接有一对对称设置的锁紧装置,位于同一导轨401上的锁紧装置对称设置在导轨401两侧,并同步向导轨401中心或导轨401两端滑动。
任一锁紧装置均包括与导轨401滑动连接的支架,支架竖直设置,支架底端设有驱动装置,任一支架均包括与导向槽滑动连接的倒T形的滑块402,滑块402顶端伸出导轨401连接有底板403,驱动装置为竖直设置在底板403上的驱动电机415,驱动电机415的动力输出端设有与齿条416配合的齿轮,底板403上还设有竖直设置的支撑杆404,支撑杆404为中空的方管,支撑杆404一侧设有加强筋414,支撑杆404的中间位置设有水平设置的叶片支撑杆406,叶片支撑杆406呈圆柱形,叶片支撑杆406远离支撑杆404的一端设有锁紧叶片409;锁紧叶片409的竖向截面呈圆弧状,锁紧叶片409外凸的外弧面为具有弹性的金属层,锁紧叶片409内凹的内弧面为与无人潜航器2配合的软质橡胶层,软质橡胶层上设有压力传感器,叶片支撑杆406设置在锁紧叶片409外弧面的金属层上,叶片支撑杆406与锁紧叶片409通过螺栓或插接的方式可拆卸连接。
任一支架上均设有与锁紧装置配合使用的辅助夹紧装置,辅助夹紧装置包括对称设置在锁紧叶片409上下两侧的夹板,位于锁紧叶片409上方的为上夹板408,位于锁紧叶片409下方的为下夹板405,上夹板408和下夹板405均垂直于竖直面设置;任一夹板均通过设置在夹板一端的传动轴411与支架转动连接,传动轴411垂直于竖直面设置,传动轴411固定在夹板上,支撑杆404上设有与传动轴411配合的轴承;夹板为矩形板,矩形板远离传动轴411的一端均布有齿,矩形板背对锁紧叶片409的一侧设有日字形的加强框407,加强框407与传动轴411焊接或一体化设置。
传动轴411上连接有动力机构;任一传动轴411的中间位置固定有一对垂直于传动轴411的压板412,压板412为长条形的板状结构,压板412一端固定在传动轴411上,沿压板412长度方向,压板412上设有长条形的传动孔,传动孔与夹板分布在传动轴411的两侧,传动孔中滑动连接有一根竖直设置的T形杆413,T形杆413由相互垂直的横杆和竖杆组成,T形杆413的竖杆设置在两个压板412之间,T形杆413的横杆设置在传动孔中,横杆可在传动孔中滑动;动力机构为夹紧液压缸410,夹紧液压缸410竖直设置在支架上,T形杆413的竖杆固定在夹紧液压缸410的活塞杆上并与活塞杆平行设置。
实施例2
利用上述系统进行无人潜航器布放回收的方法,包括布放过程和回收过程。
参见图6,布放过程包括以下步骤:
S1.操作人员通过远程监控模块向半潜式无人艇1发送指令,给出无人潜航器2要下潜的任务水域的经纬度信息;半潜式无人艇1接收航行指令,半潜式无人艇1的艇务信息处理模块根据接收到的指令规划航线,无人艇控制模块根据航线控制载有无人潜航器2的半潜式无人艇1航行至任务区域。
S2.半潜式无人艇1的导航定位模块自动识别是否到达任务水域,到达任务水域后,半潜式无人艇1浮潜指令控制模块通过浮潜模块调整半潜式无人艇1艇身压载水量,使之下潜至水面没过无人潜航器2的顶端,通过传感器模块判断是否到达设定的下潜深度,当达到设定的下潜深度时,通过布放回收指令控制布放回收装置4动作,辅助夹紧装置的上夹片和下夹片同步转动,远离锁紧叶片409;锁紧装置同步移动,远离无人潜航器2,从而松开被夹紧的无人潜航器2。
S3.操作人员通过远程监控模块上的人机交互界面向无人潜航器2的潜航器控制模块发出浮潜指令,潜航器控制模块控制无人潜航器2上浮,然后驶离甲板,或控制无人潜航器2直接前进驶离甲板。
S4.潜航器控制模块控制无人潜航器2下潜执行任务。
S5.半潜式无人艇1上浮至正常航行深度,等待下一步指令。
参见图7,回收过程包括以下步骤:
P1.无人潜航器2完成水下作业任务后上浮至水面,并将所处位置的经纬度信息通过通信模块发送给远程监控模块,远程监控模块将半潜式无人艇1所处位置的经纬度信息转发至半潜式无人艇1。
P2.半潜式无人艇1接收到无人潜航器2的位置信息后,半潜式无人艇1的艇务信息处理模块规划航线,并向无人艇控制模块发送航行指令,控制半潜式无人艇1航行至目标位置。
P3.到达无人潜航器2所在的位置区域后,目标识别装置对区域内的无人潜航器2进行识别验证,验证通过后,半潜式无人艇1的控制模块控制半潜式无人艇1下潜,下潜深度需满足以下要求:下潜深度为潜航器底部距水面距离的二倍,但不能超过半潜式无人艇1的最大下潜深度。
P4.无人潜航器2航行至半潜式无人艇1的甲板上方,并准确定位在半潜式无人艇1的布放回收装置4内;半潜式无人艇1的布放回收装置4接收布放回收指令,布放回收装置动作锁紧无人潜航器2。
无人潜航器2准确定位在布放回收装置4的过程为:定位装置设置在布放回收装置4的中轴线上,船尾设置必经点,必经点同样设置在布放回收装置4的中轴线上,定位装置将布放回收装置4的位置信息传送给艇务信息处理模块,艇务信息处理模块再转发给远程监控模块,远程监控模块再传送给无人潜航器2;最后,远程监控模块发送航行指令,遥控潜航器先经过必经点再航行至目标位置,到达半潜式无人艇1的甲板上方;远程监控模块实时监控半潜式无人艇1甲板上的画面信息,并将画面信息实时显示在人机交互界面上。
锁紧无人潜航器2的过程为:锁紧叶片409内层和夹板与锁紧叶片409配合的位置均设置有压力传感器,压力传感器将检测到的压力数据回传给远程监控模块,当叶片夹住无人潜航器2时,远程监控模块通过回传的压力数据确定无人潜航器2是否夹紧。
P5.半潜式无人艇1上浮到正常的航行深度等待下一步指令;远程监控模块控制半潜式无人艇1返航或执行下一个任务。
实施例3
参见图8,一种无人潜航器布放回收系统及布放回收方法,与实施例1的区别仅在于,动力机构与夹板连接;加强框407上设有矩形块,矩形块上设有倒T形槽,倒T形槽内滑动连接有水平设置的T形杆413;动力机构为夹紧液压缸410,夹紧液压缸410水平设置在支架上,夹紧液压缸410的活塞杆与T形杆413的竖杆平行设置,其余与实施例1相同。
实施例4
参见图9,一种无人潜航器布放回收系统及布放回收方法,与实施例1的区别仅在于,驱动装置为设置在半潜式无人艇1甲板上的锁紧液压缸417,锁紧液压缸417的活塞杆与滑块402连接,活塞杆的伸缩方向与导轨的长度方向同向,其余与实施例1相同。
- 一种水下探测设备的布放与回收装置及其布放、回收方法
- 一种船基水下滑翔机布放回收系统及相应布放和回收方法