一种冰块抓具升降机构
文献发布时间:2023-06-19 10:25:58
技术领域
本发明属于制冰设备技术领域,涉及一种冰块转运用设备,具体地,涉及一种冰块抓具升降机构。
背景技术
冰场制作的冰块重量大(一般一个冰块的重量为100KG),要人工实现冰块的搬运,会非常费时费力。例如,假如采用纯人力进行运冰,搬运48块每块约100KG重的块冰,一般需要用到60-70人。而假如采用叉车配合人力的话,搬运48块每块约100KG重的块冰,一般需要20-25个人,并需要两台叉车。这样的话,在搬运冰块方面,人员投入非常大。而且,由于属于重体力劳动活,因此,工人的工资也比较高,从而导致制冰厂在运冰方面的劳动力成本很高。
而且,夏天在制冰场搬运冰块时,需要在近40摄氏度高温的户外与不到10摄氏度的运冰车间来回搬运。这样,冰厂的温差大,而且潮气重、雾气浓,使得工人很容易在搬运过程中摔倒或被冰块砸伤。因此,容易对工人造成伤害。
为此,冰块自动转运系统变得非常迫切。如果能够有冰块自动转运系统,那么同样搬运48块每块约100KG重的块冰,可能只需要4人操作即可。这样,能够减轻劳动力成本,而且能够降低对运冰工人的伤害。
要实现冰块的自动转运,在使用冰块抓具将冰块抓取之后,需要用到升降机构来实现冰块抓具的升降,从而实现冰块在转运过程中的上下移动,以便于冰块的堆积等。
但是,由于单块冰块的重量大,从而导致其对冰块抓具升降机构的要求比较高,导致目前并没有合适的冰块抓具升降机构,进而影响了冰块自动转运的实现。
鉴于现有技术的上述技术缺陷,迫切需要研制一种冰块抓具升降机构。
发明内容
本发明的目的在于克服现有技术中存在的缺点,提供一种冰块抓具升降机构,其能够实现冰块抓具的自动升降,从而便于冰块的自动转运,并能降低工作人员的工作量。
为了实现上述目的,本发明提供如下技术方案:
一种冰块抓具升降机构,其包括两个基座,所述两个基座用于连接龙门,其特征在于,每个所述基座的中间都安装有一个电机,每个所述电机的输出轴都与一个双输出轴减速机的输入轴相连,每个所述双输出轴减速机的两个输出轴上都分别安装有一个链轮,每个所述链轮上都套设有一个链条,每个所述链条的下端都设有一个吊钩,每个所述基座上还设有两个分别与两个所述链轮的位置相对应的链条存桶,所述链条能够在所述链轮的作用下被收入所述链条存桶中。
优选地,其中,所述基座上还安装有两个轴承,所述双输出轴减速机的两个输出轴的末端分别通过一个所述轴承安装在所述基座上。
优选地,其中,所述基座上还设有安装座,所述电机和双输出轴减速机都安装在所述安装座上。
优选地,其中,所述基座安装在支撑架上。
优选地,其中,所述链条存桶为金属桶。
优选地,其中,所述基座为金属基座。
优选地,其中,所述基座可拆卸地安装在所述支撑架上。
优选地,其中,所述基座上还安装有控制器,所述控制器用于控制所述电机。
优选地,其中,所述电机为交流电机。
优选地,其中,所述控制器为单片机。
与现有技术相比,本发明的冰块抓具升降机构具有如下有益技术效果:
1、其能够实现冰块抓具的自动升降,从而便于实现冰块的自动转运,解决企业在冰块转运过程中的难题。
2、其自动化运行,需要的工人少,能够减轻企业的人力资源成本。
3、其不需要工人进行搬冰块,从而能够减少对工人的伤害。
4、其结构简单、操作方便。
附图说明
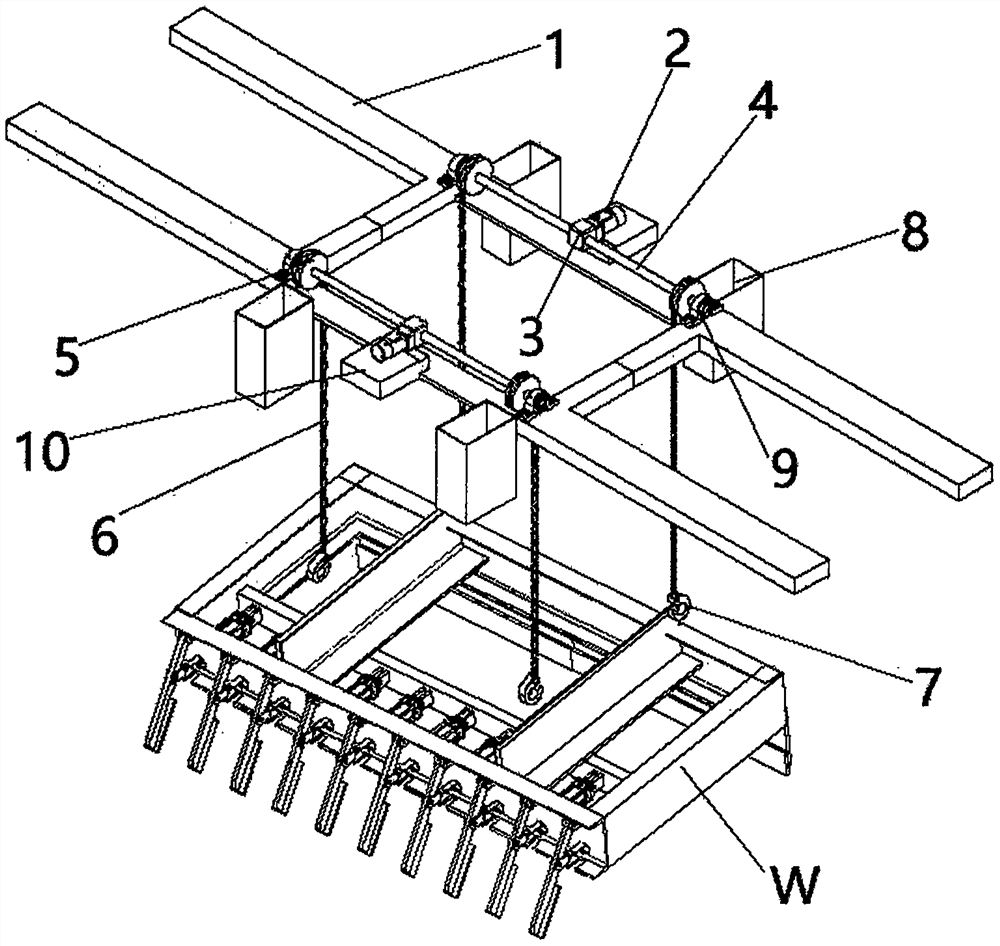
图1是本发明的冰块抓具升降机构的轴测图。
图2是本发明的冰块抓具升降机构的另一轴测图。
图3是本发明的冰块抓具升降机构的端视图。
具体实施方式
下面结合附图和实施例对本发明进一步说明,实施例的内容不作为对本发明的保护范围的限制。
本发明涉及一种冰块抓具升降机构,其能够实现冰块抓具的自动升降,从而便于实现冰块的自动转运。
如图1-3所示,本发明的冰块抓具升降机构包括两套结构相同的升降结构,两套所述升降结构对称设置而形成一个整体,构成所述冰块抓具升降机构。
其中,所述升降结构包括基座1。所述基座1用于给升降结构的其它零部件提供支撑。
在使用时,所述基座1连接在厂房,例如,冰块库房顶部的龙门上,从而便于在所述龙门的带动下进行移动。
优选地,所述基座1为金属基座。这样,其承载能力更强,能够实现大块冰块的升降,满足企业大块冰块的转运需求。
更优选地,所述基座1安装在支撑架上。通过所述支撑架,可以将所述基座1架设在高处,从而便于将冰块夹具从低处升到高处,以实现冰块的转运和堆积。
再优选地,优选地,所述基座1可拆卸地安装在所述支撑架上。这样,可以根据冰块转运高度的不同而将所述基座1安装在不同高度的支撑架上,从而使得其使用范围更广泛。
所述基座1的中间安装有电机2。所述电机2的输出轴与双输出轴减速机3的输入轴相连。这样,所述电机2的输出一方面能够经由所述双输出轴减速机3进行减速,另一方面能够经由所述双输出轴减速机3变为两个输出。
优选地,所述电机2为交流电机。这样,一方面,使得所述电机2能够提供更大的动力,另一方面,使得所述电机2的控制更加方便,再一方面,使得可以直接使用市政电驱动所述电机2,从而使得其使用更加方便。
更优选地,所述基座1上还设有安装座10。所述电机2和双输出轴减速机3都安装在所述安装座10上。这样,一方面便于所述电机2和双输出轴减速机3的安装,另一方能够使得所述电机2和双输出轴减速机3的安装更加牢固。
所述双输出轴减速机3的两个输出轴4上分别安装有一个链轮5。这样,共有两个所述链轮5,并且,两个所述链轮5都能够跟随着所述双输出轴减速机3的输出轴4的转动而转动。
优选地,所述基座1上还安装有两个轴承9。所述双输出轴减速机3的两个输出轴4的末端分别通过一个所述轴承9安装在所述基座1上。这样,使得所述双输出轴减速机3的两个输出轴4的转动更加方便,从而使得所述链轮5的转动更加方便。
每个所述链轮5上都套设有一个链条6。每个所述链条6的下端都设有一个吊钩7。这样,所述链条6能够在所述链轮5的带动下上升或下降,并通过所述链条6带动所述吊钩7上升或下降。
在实现冰块抓具的升降时,所述吊钩7挂在冰块抓具W的吊环上。由此,通过所述电机2的转动,能够带动所述吊钩7上升或下降,从而实现冰块抓具W的上升或下降。
由于总共具有四个所述吊钩7,一方面使得其可以吊起更重的冰块抓具,满足企业转运大块冰块的需求;另一方面可以使得所述冰块抓具的升降更稳定和平稳,防止危险的发生。
在本发明中,所述基座1上还设有两个分别与两个所述链轮5位置相对应的链条存桶8。例如,所述链条存桶8设置在所述链轮5的后端。所述链条6的另一端放置在所述链条存桶8中。这样,在所述链轮5带动所述链条6上升时,所述链条6能够在所述链轮5的作用下被收入所述链条存桶8中。
优选地,所述链条存桶8为金属桶。这样,其承纳和承载能力更加,便于所述链条6的存储。
此外,在本发明中,优选地,所述基座1上还安装有控制器。所述控制器用于控制所述电机2。这样,由于所述控制器的存在,使得两个所述电机2采用龙门同步控制方式实现四点同步控制,从而使得冰块抓具的升降能够自动进行,而不需要人工参与。
例如,所述控制器可以为单片机。当然,所述控制器也可以为中央处理器等。只要其能够实现电机的控制即可,而对于控制器的类型不作限定。
本发明的冰块抓具升降机构能够实现冰块抓具的自动升降,从而便于实现冰块的自动转运,解决企业在冰块转运过程中的难题。而且,其自动化运行,需要的工人少,能够减轻企业的人力资源成本。同时,其不需要工人进行搬冰块,从而能够减少对工人的伤害。最后,其结构简单、操作方便。
本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
- 一种冰块抓具升降机构
- 一种抓具抓取机构及变径原木抓具