基于显式迁移的演化多任务调度优化方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及信息技术领域,具体是基于显式迁移的演化多任务调度优化方法。
背景技术
演化算法(Evolutionary Algorithm,EA)是一类高鲁棒性的自适应搜索算法,该算法启发于生物进化,一般步骤包括交叉、变异、选择等。这些步骤反复迭代,在满足预定条件时终止。由于强大的搜索能力和易用性,在过去的几十年中,演化算法在解决现实世界中复杂的优化问题上取得了重大突破和成功。常见的演化优化器包括遗传算法(GeneticAlgorithm,GA),差分进化(Differential Evolution,DE)等,主要步骤包括种群初始化、交叉、变异和环境选择。种群初始化常使用均匀采样法或者拉丁超立方法(Latin Hypercube)在搜索空间内随机生成初始个体的集合。在遗传算法中,常采用模拟二进制交叉法和多项式变异法;在差分进化中,交叉和变异是通过超参数CR和F对种群中个体间的差异进行缩放而控制的。环境选择即根据适应度对种群的个体进行排序并选择的过程,一般对于最小(大)值优化函数,适应度排序即为目标函数的递增(减)排序。
近年来,启发于人脑能够并行执行多项不同任务的能力,在演化计算领域,一类多任务优化方法被提出,即演化多任务(Evolutionary Multitasking,EMT)算法。不同于传统的演化算法,其在一次运行中只解决一个任务,演化多任务算法则是在同时多个优化任务的搜索空间中,执行独立的演化搜索,为提高多个任务的解决效率提供了可能。通过利用不同但可能相似的任务之间的潜在协同作用,同时为对多个任务的优化搜索提供有效的信息,达到加速多任务优化的目的。
当前阶段,由于不同任务的搜索空间大多不同,因此大多数演化多任务算法都是通过将不同任务的搜索空间进行统一表示来设计的,而不同任务之间的信息复用是通过染色体交叉过程中的基因隐式迁移来进行的。基于这种隐式迁移方法而实现的演化多任务算法,往往是定义一种通用的演化机制来进行多个任务的优化,以方便不同任务之间的信息迁移。然而,不同的优化任务通常具有独特的属性,需要依赖具有特定搜索偏好的演化机制才能有效地解决问题。因此,隐式迁移的方法在不同任务的优化器选择上收到了诸多限制,在面对一些复杂情况下的多任务优化并不具备可操作性。
发明内容
本发明的目的是提供基于显式迁移的演化多任务调度优化方法。
基于显式迁移的演化单目标多任务调度优化方法,包括以下步骤:
1)确定任务OP
2)设置演化算法的基础参数。所述基础参数包括任务的演化优化器。
所述基础参数还包括优化终止条件、迁移条件、构建搜索空间映射所需的解数量N、迁移的解数量S。
所述迁移条件为相邻两次迁移间隔时间达到G。
3)利用降噪自动编码器学习得到任务OP
利用降噪自动编码器学习得到任务OP
3.1)对任务OP
3.2)根据任务OP
3.3)将解集P作为降噪自动编码器的输入,解集Q作为降噪自动编码器的输出,最小化从解集P到解集Q的重构误差L
式中,p
将解集Q作为降噪自动编码器的输入,解集P作为降噪自动编码器的输出,最小化从解集Q到解集P的重构误差L
3.4)为解集Q和解集P添加一列数值为1的特征,即更新解集P中任意元素p
3.5)计算从任务OP
M
计算从任务OP
M
式中,上标T表示转置。
4)利用演化优化器对任务OP
5)满足迁移条件时,在任务OP
在任务OP
5.1)实现任务OP
5.1.1)从任务OP
5.1.2)将解集T
5.2)实现任务OP
5.2.1)从任务OP
5.2.2)将解集T
6)重复步骤4)和步骤5),直至满足优化终止条件。
7)输出任务的最终优化解,即优化后任务OP
基于显式迁移的演化多任务调度优化方法,包括以下步骤:
1)确定任务OP
2)设置多目标演化算法的基础参数。所述基础参数包括所有任务的独立演化优化器。
所述基础参数包括优化终止条件、迁移条件、构建搜索空间映射所需的解数量N、迁移的解数量S。
所述迁移条件为相邻两次迁移间隔时间达到G。
3)利用降噪自动编码器学习得到任务OP
利用降噪自动编码器学习得到任务OP
3.1)对任务OP
3.2)根据任务OP
3.3)将解集P作为降噪自动编码器的输入,解集Q作为降噪自动编码器的输出,最小化从解集P到解集Q的重构误差
式中,p
将解集Q作为降噪自动编码器的输入,解集P作为降噪自动编码器的输出,最小化从解集Q到解集P的重构误差
3.4)为解集Q和解集P添加一列数值为1的特征,即更新解集P中任意元素p
3.5)计算从任务OP
计算从任务OP
式中,上标T表示转置。
4)利用演化优化器对任务OP
5)满足迁移条件时,在任务OP
在任务OP
5.1)实现任务OP
5.1.1)在任务OP
5.1.2)将解集T
5.2)实现任务OP
5.2.1)在任务OP
5.2.2)将解集T
6)重复步骤4)和步骤5),直至满足优化终止条件。
7)输出所有任务的最终优化解,即优化后任务OP
本发明的技术效果是毋庸置疑的,本发明克服了传统演化算法只能解决单任务的问题,突破了现有多任务算法对演化优化器的限制,解决了现有方法存在的效率低、精准性不足、信息可复用性低、迁移过程可掌控性低的问题,提高了多任务解决的效率。
附图说明
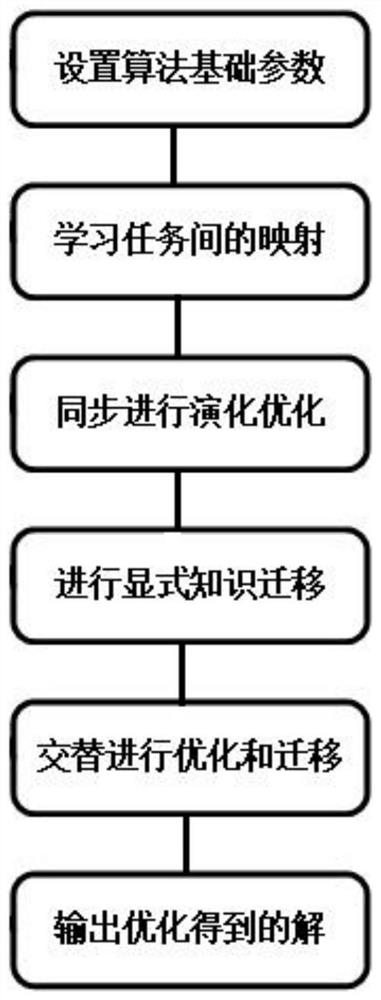
图1为本发明公开一种基于显式迁移的演化多任务算法的流程图;
图2为本发明针对单任务学习搜索空间映射的示意图;
图3为本发明针对多任务学习搜索空间映射的示意图;
图4为本发明在单目标多任务基准函数上与现有多任务算法和传统演化算法的对比(从收敛速度的角度);其中,图4(a)-(l)分别表示针对CI+HS在任务T1上的对比、针对CI+MS在任务T1上的对比、针对CI+LS在任务T1上的对比、针对PI+HS在任务T1上的对比、针对PI+MS在任务T1上的对比、针对PI+LS在任务T1上的对比、针对NI+HS在任务T1上的对比、针对NI+MS在任务T1上的对比、针对NI+LS在任务T1上的对比、针对CI+MS在任务T2上的对比、针对PI+MS在任务T2上的对比、针对NI+MS在任务T2上的对比。
图5为本发明在多目标多任务基准函数上与现有多任务算法和传统演化算法的对比(从收敛速度的角度);其中,图5(a)-(l)分别表示针对CIHS在任务T2上的对比、针对CIMS在任务T2上的对比、针对CILS在任务T2上的对比、针对PIHS在任务T2上的对比、针对PIMS在任务T2上的对比、针对PILS在任务T2上的对比、针对NIHS在任务T2上的对比、针对NIMS在任务T2上的对比、针对NILS在任务T2上的对比、针对CIHS在任务T1上的对比、针对NIHS在任务T1上的对比、针对PIHS在任务T1上的对比。
具体实施方式
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
实施例1:
基于显式迁移的演化单目标多任务调度优化方法,包括以下步骤:
1)确定任务OP
2)设置演化算法的基础参数。所述基础参数包括任务的演化优化器。
所述基础参数还包括优化终止条件、迁移条件、构建搜索空间映射所需的解数量N、迁移的解数量S。
所述迁移条件为相邻两次迁移间隔时间达到G。
3)利用降噪自动编码器学习得到任务OP
利用降噪自动编码器学习得到任务OP
3.1)对任务OP
3.2)根据任务OP
3.3)将解集P作为降噪自动编码器的输入,解集Q作为降噪自动编码器的输出,最小化从解集P到解集Q的重构误差L
式中,p
将解集Q作为降噪自动编码器的输入,解集P作为降噪自动编码器的输出,最小化从解集Q到解集P的重构误差L
3.4)为解集Q和解集P添加一列数值为1的特征,即更新解集P中任意元素p
3.5)计算从任务OP
M
计算从任务OP
M
式中,上标T表示转置。
4)利用演化优化器分别对任务OP
5)满足迁移条件时,在任务OP
在任务OP
5.1)实现任务OP
5.1.1)从任务OP
5.1.2)将解集T
5.2)实现任务OP
5.2.1)从任务OP
5.2.2)将解集T
6)重复步骤4)和步骤5),直至满足优化终止条件。
7)输出任务的最终优化解,即优化后的任务OP
实施例2:
基于显式迁移的演化多目标多任务调度优化方法,包括以下步骤:
1)确定任务OP
2)设置多目标演化算法的基础参数。所述基础参数包括所有任务的演化优化器。
所述基础参数包括优化终止条件、迁移条件、构建搜索空间映射所需的解数量N、迁移的解数量S。
所述迁移条件为相邻两次迁移间隔时间达到G。
3)利用降噪自动编码器学习得到任务OP
利用降噪自动编码器学习得到任务OP
3.1)对任务OP
3.2)根据任务OP
3.3)从OP
式中,p
将解集Q作为降噪自动编码器的输入,解集P作为降噪自动编码器的输出,最小化从解集Q到解集P的重构误差
3.4)为解集Q和解集P添加一列数值为1的特征,即更新解集P中任意元素p
3.5)计算从任务OP
计算从任务OP
式中,上标T表示转置。
4)利用演化优化器对任务OP
5)满足迁移条件时,在任务之间进行显式迁移。
在任务OP
5.1)实现任务OP
5.1.1)在任务OP
5.1.2)将解集T
5.2)实现任务OP
5.2.1)在任务OP
5.2.2)将解集T
6)重复步骤4)和步骤5),直至满足优化终止条件。
7)输出所有任务的最终优化解,即优化后任务OP
实施例3:
一种基于显示迁移方法的演化多任务算法,其特征在于,包括以下步骤:
1)初始化演化多任务算法的基础参数,包括设置优化终止条件;设置迁移条件;设置构建搜索空间映射所需的解数量(N);设置迁移的解数量(S);为所有任务设置独立的优化器。
2)学习得到任意两任务对应的搜索空间之间的有序映射,步骤包括:
使用降噪自动编码器(denoising autoencoder)学习得到任意两任务之间的特征空间映射关系。对于任意两任务(源任务OP
即可得到从OP
M
类似地,从OP
M
另外,为简化公式并消除特征偏移产生的影响,为P和Q同时加上一列数值为1的特征,即p
对于单目标任务OP
而对于多目标任务OP
3)同时对多个任务进行演化优化;不同的单目标任务上可以采用任意的演化优化器,具体参数和操作步骤因不同优化器而异,但不同的选择不会对本算法的整体有效性产生影响。
4)满足迁移条件时,在不同任务之间进行显示迁移,步骤包括:
从第一次优化迭代开始,每隔一个迁移间隔G,任意两任务OP
对于单目标任务,实现从OP
多目标任务之间的知识迁移则需要先为OP
5)迭代进行步骤3和步骤4,直至达到优化终止条件;
6)得到并输出所有任务的最终优化解。
实施例4:
参见图1至图5,本发明公开了一种基于显式迁移的演化多任务(单目标)调度优化方法,步骤如下:
1)针对单任务设置,设置演化多任务算法的基础参数。
具体实施时,参数设置如下所示:
优化终止迭代次数Max
若采用基因算法(Genetic Algorithm,GA)作为演化多任务算法的基础优化器:模拟二进制交叉p
若采用差分进化算法(Differential Evolution,DE)作为演化多任务算法的基础优化器:F=0.5,CR=0.6。
构建搜索空间映射所需的解数量N=100。迁移间隔迭代数G=10。每个任务上迁移解的数量S=10。
2)得到任意两任务OP
具体实施时,使用降噪自动编码器(denoising autoencoder)学习得到任务OP
M
以及,从OP
M
为简化公式并消除特征偏移产生的影响,为P和Q同时加上一列数值为1的特征,即p
对于单任务OP
3)对所有任务进行同步且独立的优化。
4)每相隔一个迁移间隔,两两任务之间进行显式知识迁移。
具体实施时,每隔一个迁移间隔G,任意两任务OP
知识迁移发生于当次迭代中,种群复制之后、环境选择之前。
参见表1,针对单任务,OP
I)从OP
II)将阶段1中的R
III)将T
表1针对单任务进行显式知识迁移
5)按照步骤3和4进行多任务优化,直至满足优化终止条件。
6)得到并输出所有任务的最终优化解。
具体实施时,针对单任务,表2展示了从最终得到解的质量的角度,本发明中的演化多任务方法(Proposed Method)与现有多任务算法MFEA(Multifactorial EvolutionaryAlgorithm),以及传统演化算法GA(Genetic Algorithm)和DE(Differential Evolution)的对比:
表2从解质量的角度在单目标多任务基准函数上与现有多任务算法和传统演化算法的对比
图4(a)-(l)部分展示了四者在收敛速度方面的对比。
实施例4:
参见图1至图5,本发明公开了一种基于显式迁移的演化多目标多任务调度优化方法,步骤如下。
1)针对多任务设置,设置演化多任务算法的基础参数。
具体实施时,参数设置如下所示:
优化终止迭代次数Max
分别采用NSGAII算法(Non-dominated Sorting Algorithm II)和SPEA2算法(Strength Pareto Evolutionary Algorithm 2)作为演化多任务算法的基础优化器:模拟二进制交叉p
构建搜索空间映射所需的解数量N=100。迁移间隔迭代数G=10。每个任务上迁移解的数量S=10。
2)得到任意两任务OP
对于多任务OP
3)对所有任务进行同步且独立的优化。
4)每相隔一个迁移间隔,两两任务之间进行显式知识迁移。
参见表3,针对多任务,OP
I)从OP
II)以a为评估标准,从OP
III)将阶段2中的R
IV)将T
表3多任务进行显式知识迁移
5)按照步骤3-4进行多任务优化,直至满足优化终止条件。
6)得到并输出所有任务的最终优化解。
针对多任务,表4展示了从最终得到解的质量的角度,本发明中的演化多任务方法(Proposed Method)与现有多任务算法MOMFEA(Multiobjective MultifactorialEvolutionary Algorithm),以及传统多目标演化算法NSGAII(Non-dominated SortingAlgorithm II)和SPEA2(Strength Pareto Evolutionary Algorithm 2)的对比。
表4从解质量的角度在多目标多任务基准函数上与现有多任务算法和传统演化算法的对比
图5(a)-(l)部分展示了四者在收敛速度方面的对比。
- 基于显式迁移的演化多任务调度优化方法
- 一种基于非正交多址接入的多任务计算迁移能耗优化方法