多传感器航空摄影技术
文献发布时间:2023-06-19 10:57:17
技术领域
本发明属于航空摄影技术领域,具体涉及一种多传感器航空摄影装置,以及采用该装置同步拍摄的控制方法和异步拍摄的控制方法。
背景技术
测绘航空摄影领域的航摄仪经过多年的发展已经形成了高、中、低空不同领域,多类传感器,多种数据获取的格局。目前不同大小、精度的正射真彩色影像航摄仪、激光雷达航摄仪、倾斜摄影航摄仪、多光谱航摄仪、高光谱航摄仪、合成孔径雷达航摄仪分别获取不同的光谱影像、激光点云、雷达点云等多种遥感数据,广泛应用于各行各业。数据的广泛使用也催生出了越来越多的应用和需求。应用行业的交叉和应用范围的扩大,推动数据的需求慢慢从单一数据扩展到多源数据。
多家厂商先后推出了多种集成设备,一般可以同时获取正射真彩色影像、倾斜影像、激光点云、热红外影像、高光谱影像、合成孔径雷达影像中的2-3种数据。
有人机载测绘航空摄影是在飞机上将航摄仪通过飞机机舱下专门预留的摄影窗口拍摄地面获取地理信息的一种测绘勘察方式。受飞机结构影像,预留摄影窗口必须位于飞机龙骨和主要受力结构之间,开孔大小有限制。目前通用的摄影窗口开孔尺寸为50厘米。正射真彩色影像航摄仪需要获取大幅面的影像,设备体积较大;倾斜航摄仪通过多个倾斜安置的中画幅数码相机获取多视角的影像数据,因倾斜安置方法,组合后整体体积也很大;适应高空作业的激光雷达设备需要较大的功率,体积也很大,由此产生了摄影窗口尺寸与集成设备大小之间的矛盾。
发明内容
发明目的:本发明提供了一种多传感器航空摄影装置,该装置能够将帚扫式传感器、正射相机、倾斜摄影设备集成在一起同时使用,也可以让各集成模块单独使用,具有快速组合、分体或独立使用的功能,适应不同的应用场景。
技术方案:本发明一方面公开了多传感器航空摄影装置,包括帚扫式集成模块、正射集成模块、倾斜集成模块中的一个或多个;
所述帚扫式集成模块用于将多传感器航空摄影装置与航空飞行器固定连接,以及安装帚扫式传感器,包括:帚扫式固定框架;所述帚扫式固定框架上部用于将多传感器航空摄影装置与航空飞行器固定连接;所述帚扫式固定框架内部设置有多个帚扫式传感器的固定位;所述帚扫式固定框架的底部与帚扫式传感器的固定位对应的区域设置有帚扫式传感器的扫描视窗;
帚扫式传感器的视窗通常为狭长型,整个狭长视窗区域的长轴与航拍时的飞行方向垂直;视窗区域沿长轴的两侧分别为正射集成模块和倾斜集成模块的固定位;在倾斜模块固定位的附近设置有帚扫与倾斜模块接线孔,正射模块固定位的附近设置有帚扫与正射模块接线孔;
所述正射集成模块用于安装固定正射相机,包括:正射固定框架;所述正射相机设置于正射固定框架的内部,正射固定框架的底部设置有镜头窗口,上部设有接线孔,所述接线孔与帚扫与正射模块接线孔对应;正射固定框架的上端还设有连接固定位,用于将正射集成模块固定连接到帚扫式集成模块底部的正射模块固定位;
所述倾斜集成模块用于安装固定倾斜摄影设备,包括:倾斜固定框架;所述倾斜固定框架包括顶面、底面和多个侧面,底面上设置有各数码相机、近红外相机镜头的开孔,顶面设置有接线孔,与帚扫与倾斜模块接线孔对应;侧面上端设有连接固定位,用于将倾斜集成模块固定安装于帚扫式集成模块底部的倾斜模块固定位;倾斜相机固定架固定在倾斜固定框架内部,用于安装数码相机301;
所述帚扫式集成模块上设有主控制器,用于对安装在帚扫式集成模块内的传感器进行控制;所述正射集成模块上设置有副控制器,用于对安装在正射集成模块内的相机进行控制;所述倾斜集成模块上设置有从控制器,用于对安装于倾斜集成模块内的传感器或相机进行控制。
另一方面,本发明还公开了上述多传感器航空摄影装置进行异步拍摄的方法,所述异步拍摄为正射集成模块内的正射相机与倾斜集成模块内倾斜摄影设备的拍摄曝光点异步;包括:
在最高级别控制器与从控制器之间增加加密拍摄控制线路,所述加密拍摄控制线路用于发送加密曝光指令;
最高级别的控制器获取航空规划软件规划结果,当到达规划结果中的曝光点坐标时,将规划曝光命令同时发送给正射集成模块和倾斜集成模块;
在规划曝光命令之间,根据预设的加密拍摄规则,触发加密曝光指令的发送,所述加密曝光指令通过加密拍摄控制线路发送给倾斜集成模块上的从控制器;
加密曝光命令的反馈信号通过加密拍摄控制线路反馈给最高级别的控制器。
实现上述方法的多传感器航空摄影异步拍摄控制系统包括:
加密拍摄控制线路设置模块,用于在最高级别控制器与从控制器之间增加加密拍摄控制线路,所述加密拍摄控制线路用于发送加密曝光指令;
同步拍摄曝光点发送模块,所述同步拍摄曝光点发送模块位于最高级别控制器内,用于获取航空规划软件规划结果,当到达规划结果中的曝光点坐标时,将规划曝光命令同时发送给正射集成模块和倾斜集成模块;
加密曝光指令发送模块,所述加密曝光指令发送模块位于最高级别控制器内,用于在规划曝光命令之间,根据预设的加密拍摄规则,触发加密曝光指令的发送,所述加密曝光指令通过加密拍摄控制线路发送给倾斜集成模块上的从控制器;
加密曝光命令反馈信号接收模块,所述加密曝光命令反馈信号接收模块位于最高级别控制器内,用于接收通过加密拍摄控制线路反馈给最高级别控制器的加密曝光命令反馈信号。
另一方面本发明还公开了上述多传感器航空摄影装置同步拍摄控制方法,包括:
S1、获取各拍摄设备的延迟参数初始值;
S2、各级控制器根据各设备的延迟参数来触发各设备的曝光命令:
控制器对自身所在集成模块内传感器和相机根据延迟参数从大到小排序,最先触发延迟参数最大的传感器或相机的曝光命令,比该传感器或相机延迟参数小△t的传感器或相机,在时长△t后触发曝光命令;
S3、在航摄过程中,各级控制器计算各设备的曝光延迟,曝光延迟为控制器发出曝光指令到收到拍摄设备反馈信号的时间差;控制器对各设备的最近N个曝光延迟计算平均值,如平均值与当前延迟参数之差大于预设的阈值,则更新该设备的延迟参数为所述平均值,由此实现延迟参数的更新。
实现上述方法的多传感器航空摄影同步拍摄控制系统,包括:
拍摄设备的延迟参数初始值获取模块,用于获取各拍摄设备的延迟参数初始值;
拍摄设备曝光命令触发模块,用于根据各设备的延迟参数来触发各设备的曝光命令;
延迟参数更新模块,用于根据步骤S3更新各设备的延迟参数。
有益效果:本发明公开的多传感器航空摄影装置通过上下结构安装多个集成模块,帚扫式与面扫描相互配合,构建了紧凑的航摄仪结构,实现了航空摄影多传感器的集成。
附图说明
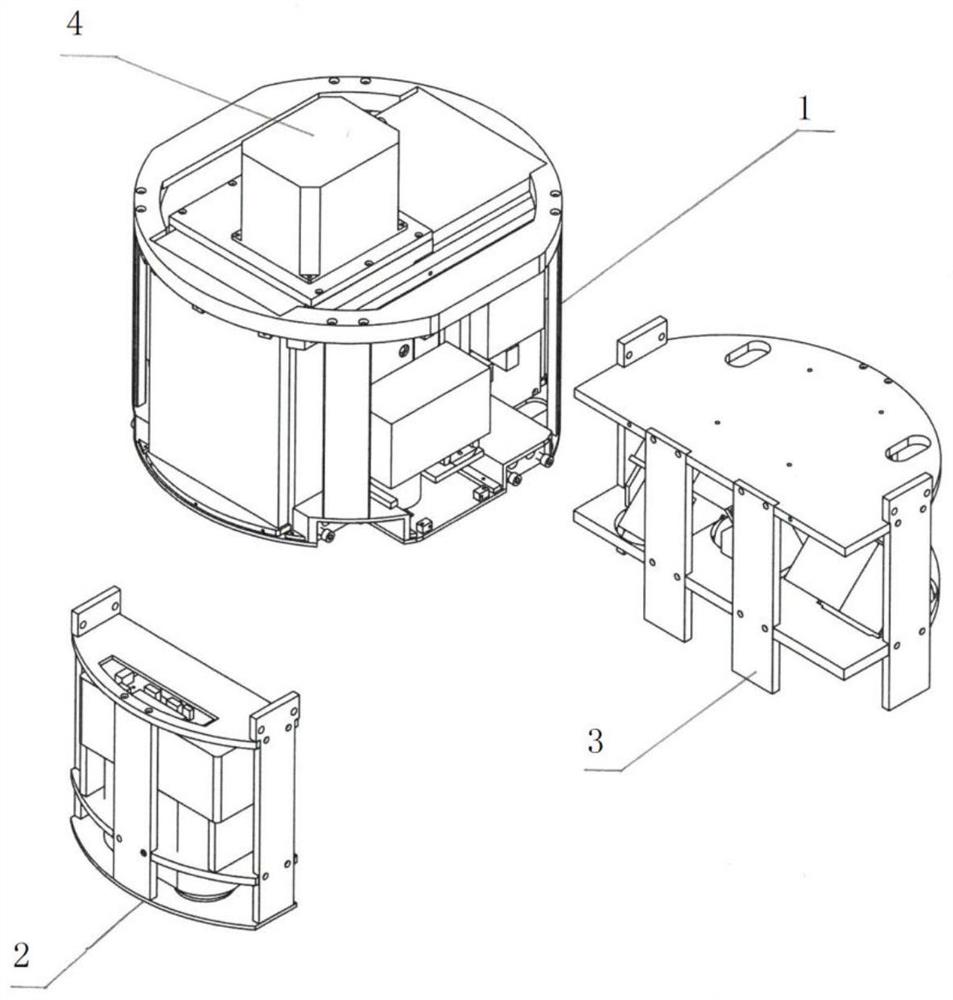
图1为帚扫式集成模块、正射集成模块、倾斜集成模块的分体示意图;
图2为帚扫式集成模块、正射集成模块、倾斜集成模块同时安装的立体图;
图3为帚扫式集成模块、正射集成模块、倾斜集成模块同时安装的剖面图;
图4为帚扫式集成模块的结构示意图;
图5为高光谱或热红外传感器快装结构示意图;
图6为帚扫式集成模块的底部仰视图;
图7为正射集成模块的结构示意图;
图8为倾斜集成模块的结构示意图;
图9为带倾角的高光谱或热红外传感器固定座结构示意图;
图10为帚扫式集成模块与正射集成模块同时安装的示意图;
图11为帚扫式集成模块与倾斜集成模块同时安装的示意图;
图12为正射集成模块与倾斜集成模块同时安装的示意图;
图13为带外挂装置的倾斜集成模块示意图;
图14为控制器三级级联结构示意图;
图15为多传感器航空摄影异步拍摄控制系统的组成架构图;
图16为多传感器航空摄影同步拍摄控制系统的组成架构图。
具体实施方式
下面结合附图和具体实施方式,进一步阐明本发明。
附图的图不是按比例绘制的,相同的附图标记用于相同的特征或具有类似功能的特征,具体为:1-帚扫集成模块,2-正射集成模块,3-倾斜集成模块,4-辅助设备(IMU),5-倾斜与正射模块连接器;101-激光传感器,102-高光谱或热红外传感器,103-第一高光谱或热红外传感器固定座,104-易拆卸外壳,105-帚扫式固定框架,106-外壳,107-倾斜模块固定位,108-正射模块固定位,109-刚性连接装置,110-主控制器,111-高光谱或热红外传感器视窗,112-激光视窗,113-帚扫与正射模块接线孔,114-帚扫与倾斜模块接线孔,115-快装滑槽,116-第二高光谱或热红外传感器固定座;201-正射相机,202-副控制器,203-正射固定框架,204-连接固定位,205-接线孔;301-数码相机,302-近红外相机,303-倾斜固定框架,304-从控制器,305-接线孔,306-倾斜相机固定架,307-连接固定位,308-外挂位,309-外挂设备。
实施例1
本发明公开了一种多传感器航空摄影装置,该装置包括帚扫式集成模块1、正射集成模块2、倾斜集成模块3;这三个集成模块可以同时安装使用,也可以单独使用,还可以任选其中的两个安装使用。
如图1所示,为帚扫式集成模块1、正射集成模块2、倾斜集成模块3分体示意图,图2为这三个集成模块同时安装的立体图。其中帚扫式集成模块1位于上部,其底部外侧设由正射集成模块2、倾斜集成模块3的固定位;正射集成模块2、倾斜集成模块3位于下部,且正射集成模块2与倾斜集成模块3之间有帚扫式传感器的扫描视窗区域。图3为剖面图,其中的W区域即为帚扫式传感器的扫描视窗区域。帚扫式传感器对姿态参数依赖性较大,姿态传感器4与帚扫式集成模块1就近设置,本实施例中,将姿态传感器4设置于帚扫式集成模块1的上方。
帚扫式集成模块1用于将多传感器航空摄影装置与航空飞行器固定连接,以及安装帚扫式传感器。帚扫式传感器包括:帚扫式激光雷达、高光谱传感器、热红外传感器等,可以根据需要选择一种或多种。如图4所示,帚扫式集成模块包括:帚扫式固定框架105,其上部用于将多传感器航空摄影装置与航空飞行器固定连接;其内部设置有多个帚扫式传感器的固定位;帚扫式固定框架的底部与帚扫式传感器的固定位对应的区域设置有帚扫式传感器的扫描视窗。本实施例中,帚扫式固定框架内的传感器有一个帚扫式激光雷达、1个高光谱传感器、1个热红外传感器;其中高光谱传感器与热红外传感器分别通过第一高光谱或热红外传感器固定座103设置于帚扫式激光雷达101的左右两侧。高光谱传感器和热红外传感器均垂直安装,二者可以获取同一区域内的高光谱图像和热红外图像。如果采用光谱频段不同的两个高光谱传感器,也采用垂直安装的方式,即获取同一区域内不同频段的高光谱图像。
帚扫式固定框架105上靠近第一高光谱或热红外传感器固定座103外侧的外壳104为可拆卸式,便于高光谱或热红外传感器的安装与拆卸;其余部分的外壳106设置为与帚扫式固定框架105固定连接。
第一高光谱或热红外传感器固定座103上安装有快装滑槽115,拆下可拆卸外壳114后,可以快速地通过快装滑槽115安装或拆卸高光谱或热红外传感器。如图5所示。
帚扫式传感器对IMU(姿态传感器)的依赖性较大,其与IMU就近连接。本实施例中,在帚扫式激光雷达101的上方设置有刚性连接装置109,刚性连接装置109的两个侧面上设有安装高光谱传感器与热红外传感器固定座的连接孔,顶面设有安装IMU的连接孔。
帚扫式传感器的视窗通常为狭长型,本实施例中,高光谱传感器与热红外传感器使用高光谱或热红外传感器视窗111,处于视窗区域的两端,激光雷达的视窗112处于视窗区域的中间,整个狭长视窗区域的长轴与航拍时的飞行方向垂直,如图6所示,为帚扫式集成模块的底部仰视图。视窗区域沿长轴的两侧分别为正射集成模块2、倾斜集成模块3的固定位,即倾斜模块固定位107和正射模块固定位108;在倾斜模块固定位107的附近设置有帚扫与倾斜模块接线孔114,正射模块固定位108的附近设置有帚扫与正射模块接线孔113。
如图7所示,为正射集成模块2的立体示意图和分体示意图。正射集成模块用于安装固定正射相机;正射相机可以是包括一个以上镜头通过旁轴方式组合形成较大幅面的正射相机,也可以是由一个以上倾斜安装的独立相机通过后处理拼接形成的大幅面正射相机。本实施例中,正射相机201是包括2个镜头的大幅面正射相机。正射相机设置于正射固定框架203的内部,正射固定框架的底部设置有镜头窗口,上部设有接线孔205,与帚扫与正射模块接线孔113对应。正射固定框架203的上端还设有连接固定位204,用于将正射集成模块固定连接到帚扫式集成模块1底部的正射模块固定位108。
如图8所示,为倾斜集成模块3的立体示意图、分体图和剖面图。倾斜集成模块用于安装固定倾斜摄影设备,倾斜摄影设备包括一个以上倾斜安装的数码相机。为了增加数据种类,提高拍摄效率,还可以包括一个近红外相机。本实施例中,倾斜摄影设备由四个倾斜安装的数码相机301和一个近红外相机302组成。如图8-(a)所示,倾斜固定框架303包括顶面、底面和多个侧面,底面上设置有各数码相机、近红外相机镜头的开孔,顶面设置有接线孔,与帚扫与倾斜模块接线孔114对应;侧面上端设有连接固定位307,用于将倾斜集成模块固定安装于帚扫式集成模块1底部的倾斜模块固定位107。倾斜相机固定架306固定在倾斜固定框架303内部,用于安装数码相机301。
帚扫式集成模块1、正射集成模块2、倾斜集成模块3都有各自的控制器,用于本模块内部传感器的启停、通信、数据传输、数据格式转换、命令传输、反馈信息接收等操作。当每个集成模块单独安装工作时,集成模块内部的传感器或相机受自身所在集成模块控制器的控制,各控制器对外部的控制指令进行解析,转换为本模块传感器或相机可以识别的信号,由此实现了数据格式各异的各传感器或相机的控制。
具体地,帚扫式集成模块1上设置有主控制器110,用于对安装在帚扫式集成模块1内的传感器进行控制;正射集成模块2上设置有副控制器202,用于对安装在正射集成模块2内的相机进行控制;倾斜集成模块3上设置有从控制器304,用于对安装于倾斜集成模块3内的传感器或相机进行控制。当帚扫式集成模块1、正射集成模块2、倾斜集成模块3同时安装使用,或有两个模块安装使用时,多个控制器采用级联方式传输控制信号;此时,外部控制指令只发送给最高级别的控制器,由最高级别的控制器将外部控制指令转发给其他各级控制器。本实施例中,三个集成模块同时安装使用,各控制器构成三级级联,其结构如图14所示。其中主控制器为最高级别的控制器,其与副控制器连接,副控制器与主控制器和从控制器连接;从控制器为级别最低的控制器。主控制器控制安装在帚扫式集成模块1内的传感器M_1至M_n;副控制器控制安装在正射集成模块2内的传感器或相机V_1至V_p;从控制器控制安装在倾斜集成模块3内的传感器或相机S_1至S_p。外部控制指令只需发送给主控制器,主控制器识别该控制指令是发送给什么设备。如是发送给安装在正射集成模块2内的传感器或相机,主控制器将此外部控制指令发送给副控制器,由副控制器对该指令进行解析,并发送给接收设备;如外部控制指令是发送给倾斜集成模块内的传感器或相机,主控制器将此外部控制指令发送给副控制器,副控制器识别出该指令不是发送给自身模块内的设备,则将该指令发送给从控制器,由从控制器对该指令进行解析,并发送给接收设备。通过这样的级联控制方式,所有传感器或相机的控制由最高级别的控制器来控制,有利于实现统一控制。
实施例2:
本实施例与实施例1的区别在于,本实施例中,帚扫式激光雷达101的左右两侧安装的是两个相同的传感器,即为两个光谱频段相同的高光谱传感器,或同为热红外传感器。此时这两个相同的传感器以微倾角安装,其获取的数据中有重叠区域,可以拼接成较大扫描宽度的数据,以此来提高拍摄效率。这种情况下,高光谱或热红外传感器安装在带倾角的第二高光谱或热红外传感器固定座116上,如图9所示,第二高光谱或热红外传感器固定座116为呈直角的两个固定面,其水平方向的固定面上有开口116-1,传感器通过此开口经视窗111进行扫描;竖直方向的固定面与刚性连接装置109通过连接孔连接。竖直方向的固定面左右两个平面之间有夹角α,由于此夹角的存在,当竖直方向的固定面固定在刚性连接装置109的侧面上时,会导致水平方向的固定面不再水平,从而使其上安装的高光谱或热红外传感器发生倾斜。本实施例中,夹角α的取值范围为10-20°。
实施例3:
本实施例为帚扫式集成模块1与正射集成模块2同时安装,其示意图如图10所示。
实施例4:
本实施例为帚扫式集成模块1与倾斜集成模块3同时安装,其示意图如图11所示。
实施例5:
本实施例为正射集成模块2与倾斜集成模块3同时安装,此时没有帚扫式集成模块,无需保留视窗区域W。如图12所示,正射集成模块2与倾斜集成模块3通过具有两个直角的倾斜与正射模块连接器5连接。IMU模块4设置于倾斜集成模块3的顶部。
实施例6:
在一些应用场景中,需要额外增加拍摄设备,如增加合成孔径雷达(SAR)或相机。为了便于安装额外增加的拍摄设备,倾斜集成模块3的倾斜固定框架303侧面上设置有外挂位308,通过此外挂位,可以将额外增加的外挂设备309安装在倾斜集成模块3上,如图13所示。
实施例7:
本实施例基于实施例1中的多传感器航空摄影装置,即三个集成模块同时安装。
在航空拍摄时,通常采用航空摄影航线规划导航控制软件来进行航线规划。其规划遵循设计的重叠度,依据设备的性能参数和需要飞行的测区范围、地形,规划出航空摄影飞行航线的起始点,曝光点坐标,飞行高度。
帚扫式传感器有自身的扫描频率,通常以该频率持续进行扫描。正射集成模块和倾斜集成模块内的各传感器和相机依据规划结果中的曝光点进行同步拍摄。但是在一些应用场景中,需要在规划结果的曝光点之间增加倾斜摄影的拍摄,即将倾斜摄影的拍摄点加密,以实现正射摄影与倾斜摄影的异步拍摄。
本实施例提供了一种加密倾斜摄影曝光点的异步拍摄方法。在最高级别控制器与从控制器之间增加加密拍摄控制线路,用于发送加密曝光指令。
最高级别的控制器获取航空规划软件规划结果,当到达规划结果中的曝光点坐标时,将规划曝光命令同时发送给正射集成模块和倾斜集成模块(需经过副控制器和从控制器的转发、解析),在规划曝光命令之间,根据预设的加密拍摄规则,触发加密曝光指令的发送,该加密曝光指令通过加密拍摄控制线路发送给倾斜集成模块上的从控制器,从控制器控制各倾斜摄影设备的拍摄,实现加密拍摄;同样地,加密曝光命令的反馈信号也通过加密拍摄控制线路反馈给最高级别的控制器。
通过采用规划曝光与加密曝光分别处理,可以灵活设置加密曝光的规则。加密曝光规则可以采用时间或距离的规则,如间隔固定时长加密曝光,飞行固定距离加密曝光。
本实施例还公开了实现上述异步拍摄方法的控制系统,如图15所示,包括:加密拍摄控制线路设置模块,用于在最高级别控制器与从控制器之间增加加密拍摄控制线路,所述加密拍摄控制线路用于发送加密曝光指令;
同步拍摄曝光点发送模块,所述同步拍摄曝光点发送模块位于最高级别控制器内,用于获取航空规划软件规划结果,当到达规划结果中的曝光点坐标时,将规划曝光命令同时发送给正射集成模块和倾斜集成模块;
加密曝光指令发送模块,所述加密曝光指令发送模块位于最高级别控制器内,用于在规划曝光命令之间,根据预设的加密拍摄规则,触发加密曝光指令的发送,所述加密曝光指令通过加密拍摄控制线路发送给倾斜集成模块上的从控制器;
加密曝光命令反馈信号接收模块,所述加密曝光命令反馈信号接收模块位于最高级别控制器内,用于接收通过加密拍摄控制线路反馈给最高级别控制器的加密曝光命令反馈信号。
实施例8:
正射拍摄和倾斜拍摄的相机或传感器会存在延迟,而且各设备的延迟参数会不同,影响到同步拍摄的质量。本实施例提供了一种实时修正延迟参数的同步拍摄方法。副控制器和从控制器对自身所在集成模块内的传感器和相机进行延迟修正和延迟参数的更新。
S1、获取各拍摄设备的延迟参数初始值,有以下几种途径获取:第一是厂家的出场报告中可能有延迟参数;第二是对设备进行室内检测获取;第三是设备正式工作之前测试拍摄获取;
S2、各级控制器根据各设备的延迟参数来触发各设备的曝光命令:
控制器对自身所在集成模块内传感器和相机根据延迟参数从大到小排序,最先触发延迟参数最大的传感器或相机的曝光命令,比该传感器或相机延迟参数小△t的传感器或相机,在时长△t后触发曝光命令;
S3、在航摄过程中,各级控制器计算各设备的曝光延迟,曝光延迟为控制器发出曝光指令到收到拍摄设备反馈信号的时间差;控制器对各设备的最近N个曝光延迟计算平均值,如平均值与当前延迟参数之差大于预设的阈值,则更新该设备的延迟参数为所述平均值,由此实现延迟参数的更新。
本实施例还公开了实现上述同步拍摄的控制系统,如图16所示,包括:拍摄设备的延迟参数初始值获取模块,用于获取各拍摄设备的延迟参数初始值;
拍摄设备曝光命令触发模块,用于根据各设备的延迟参数来触发各设备的曝光命令;
延迟参数更新模块,用于根据步骤S3更新各设备的延迟参数。
- 多传感器航空摄影技术
- 复合传感器及基于该传感器的航空发动机气路故障检测诊断方法