一种用于异形体重建的多组线结构光视觉系统及方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及计算机视觉领域,尤其涉及一种用于异形体重建的多组线结构光视觉系统及方法。
背景技术
传统的结构光三维扫描仪的视线范围都呈现圆锥状,信息的搜集皆限定在一定的范围内。由于扫描范围有限,因此想要对物体整体进行三维模型的重建常常需要移动扫描仪对物体进行全方位扫描,或者将物体置于电动转盘之上。
基于线结构光技术的三维扫描仪原理是通过向被测物体投射激光条纹,在被测物体表面激光条纹会发生形变,通过摄像头采集画面提取出光条中心,利用标定数据,即可计算出光平面与被测物体交线上的点的深度信息。若再增加一维信息,使扫描装置沿着某一方向水平移动,则可获得被测物体正面(激光扫描的那一面)的完整的深度信息,但这种方法往往忽略了物体背面或底部的三维信息,导致构建出待测物的三维模型不完整。
发明内容
本发明的目的在于提出一种用于异形体重建的多组线结构光视觉系统及方法,以解决上述问题。
为达此目的,本发明采用以下技术方案:一种用于异形体重建的多组线结构光视觉系统,包括透明载物板、移动平台、激光发射器、摄像模组和图像拼接处理器;所述透明载物板用于承载待测物;所述移动平台相对所述透明载物板线性移动,用于搭载所述激光发射器和所述摄像模组;多个所述激光发射器和多个所述摄像模组分别设置在所述移动平台上;多个所述激光发射器用于在透明载物板的上方和下方发射出激光条纹,各个所述激光发射器发出激光条纹的光平面分别在同一平面,且垂直于所述移动平台的滑动方向,形成用于扫描待测物的光截面,多道激光条纹用于在待测物的外表配合形成闭合光圈;多个所述摄像模组用于在所述透明载物板的上方和下方采集当前闭合光圈完整的图像;所述图像拼接处理器用于接收各个所述摄像模组采集到的图像,并从中提取出激光条纹的中心线,根据映射关系进行计算得到多个轮廓信息;所述图像拼接处理器还用于将多个轮廓信息进行拼接,对拼接后的轮廓信息进行曲线拟合,得出当前闭合光圈完整平滑的轮廓信息。
进一步,所述激光发射器的数量为4个,所述摄像模组的数量为3个;两个所述激光发射器分别位于所述透明载物板的两侧上方,两个所述激光发射器分别位于所述透明载物板的两侧下方,对角的两个所述激光发射器相互对射设置;两个所述摄像模组分别位于所述透明载物板的两侧上方,一个所述摄像模组位于所述透明载物板的下方。
进一步,各个所述摄像模组分别包括相机和反射镜面,各个所述反射镜面位于所述移动平台的同一端,各个所述相机位于所述移动平台的另一端;所述反射镜面用于将当前闭合光圈的图像反射至同组的所述相机;所述相机用于采集所述反射镜面反射的图像。
进一步,所述移动平台呈凵形,所述移动平台的两侧为透明侧壁,所述透明载物板位于所述移动平台底部的上方;位于所述透明载物板上方的所述摄像模组分别设置在所述透明侧壁的外壁面,所述激光发射器设置在所述透明侧壁的内壁面;位于所述透明载物板下方的所述摄像模组设置在所述移动平台的内侧底部。
进一步,还包括机架,所述机架具有线性驱动组件;所述透明载物板水平设置在所述机架的顶端面;所述线性驱动组件用于驱动所述移动平台移动。
进一步,所述摄像模组的主光轴与所述光截面之间的角度为20°~60°。
进一步,所述透明载物板为玻璃板或亚克力板中的任一种。
进一步,所述相机为CCD相机。
本发明还公开了一种用于异形体重建的多组线结构光视觉方法,应用在上述的一种用于异形体重建的多组线结构光视觉系统,包括以下步骤:
系统全局标定,建立图像坐标系和现实空间坐标之间的映射关系;
多个激光发射器发射激光条纹形成光截面,多个摄像模组从不同角度采集当前闭合光圈的图像;
图像拼接处理器收集各个摄像模组采集的图像,并从每个摄像模组采集的图像中提取出激光条纹的中心线,根据映射关系计算出中心线的点在现实空间坐标下对应的三维坐标,即得到轮廓信息;
图像拼接处理器将多个轮廓信息进行拼接,对拼接后的轮廓信息进行曲线拟合,得出当前闭合光圈完整平滑的轮廓信息;
移动平台线性移动,对待测物的下一截面进行扫描,得出下一截面闭合光圈完整平滑的轮廓信息,直至得出整个待测物的三维模型。
进一步,图像拼接处理器提取激光条纹的中心线之前还进行图像预处理步骤,所述图像预处理步骤包括图像滤波、图像分割和特征提取。
在本发明提供的一种用于异形体重建的多组线结构光视觉系统及方法中,通过多个激光发射器在透明载物板上方和下方的同一平面发射出激光条纹,当光截面扫过待测物时,多道激光条纹配合实现360°照射在待测物体上,同时形成闭合光圈,实现多条激光条纹能反映出待测物当前截面完整的深度信息,即待测物的轮廓信息。再通过多个摄像模组在透明载物板的上方和下方采集闭合光圈当前完整的图像,图像拼接处理器基于线结构光三维重建原理和图像拼接原理,从各个摄像模组采集的图像中提取出激光条纹的中心线进行计算得到多个轮廓信息,并对多个轮廓信息进行拼接以及曲线拟合,得出当前闭合光圈完整平滑的轮廓信息。随着移动平台往同一方向移动使光截面完整地扫过待测物,图像拼接处理器依次的计算得到待测物每一截面的轮廓信息,从而精确地得到待测物完整的三维信息。
附图说明
附图对本发明做进一步说明,但附图中的内容不构成对本发明的任何限制。
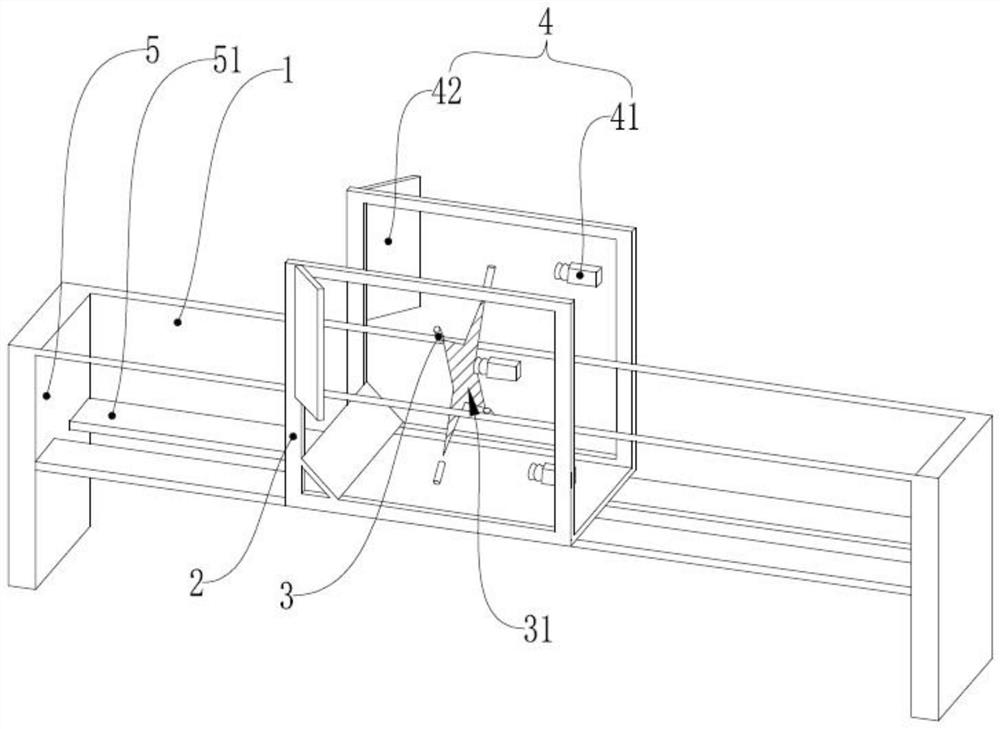
图1是本发明其中一个实施例的结构示意图;
图2是本发明其中一个实施例的流程示意图;
附图中:1-透明载物板、2-移动平台、3-激光发射器、31-光截面、4-摄像模组、41-相机、42-反射镜面、5-机架、51-线性驱动组件。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,除非另有说明,“多个”的含义是两个或两个以上。
本实施例的一种用于异形体重建的多组线结构光视觉系统,包括透明载物板1、移动平台2、激光发射器3、摄像模组4和图像拼接处理器;所述透明载物板1用于承载待测物;所述移动平台2相对所述透明载物板1线性移动,用于搭载所述激光发射器3和所述摄像模组4;多个所述激光发射器3和多个所述摄像模组4分别设置在所述移动平台2上;多个所述激光发射器3用于在透明载物板1的上方和下方发射出激光条纹,各个所述激光发射器3发出激光条纹的光平面分别在同一平面,且垂直于所述移动平台2的滑动方向,形成用于扫描待测物的光截面31,多道激光条纹用于在待测物的外表配合形成闭合光圈;多个所述摄像模组4用于在所述透明载物板1的上方和下方采集当前闭合光圈完整的图像;所述图像拼接处理器用于接收各个所述摄像模组4采集到的图像,并从中提取出激光条纹的中心线,根据映射关系进行计算得到多个轮廓信息;具体地,所述映射关系是指图像坐标系和现实空间坐标之间的映射关系,是根据标定后激光光点、激光发射器3和摄像模组4之间的角度和距离确定。所述图像拼接处理器还用于将多个轮廓信息进行拼接,对拼接后的轮廓信息进行曲线拟合,得出当前闭合光圈完整平滑的轮廓信息。
在本发明中,通过多个激光发射器3在透明载物板1上方和下方的同一平面发射出激光条纹,当光截面31扫过待测物时,多道激光条纹配合实现360°照射在待测物体上,同时形成闭合光圈,实现多条激光条纹能反映出待测物当前截面完整的深度信息,即待测物的轮廓信息。再通过多个摄像模组4在透明载物板1的上方和下方采集闭合光圈当前完整的图像,图像拼接处理器基于线结构光三维重建原理和图像拼接原理,从各个摄像模组4采集的图像中提取出激光条纹的中心线进行计算得到多个轮廓信息,并对多个轮廓信息进行拼接以及曲线拟合,得出当前闭合光圈完整平滑的轮廓信息。随着移动平台2往同一方向移动使光截面31完整地扫过待测物,图像拼接处理器依次的计算得到待测物每一截面的轮廓信息,从而精确地得到待测物完整的三维信息。
优选地,所述激光发射器3的数量为4个,所述摄像模组4的数量为3个;两个所述激光发射器3分别位于所述透明载物板1的两侧上方,两个所述激光发射器3分别位于所述透明载物板1的两侧下方,对角的两个所述激光发射器3相互对射设置;两个所述摄像模组4分别位于所述透明载物板1的两侧上方,一个所述摄像模组4位于所述透明载物板1的下方。如此,如图1所示,通过将四个激光发射器3分布在透明载物板1的四个角落,并采用对角互射设置形成光截面31,利于多道激光条纹在待测物上形成闭合光圈。其中,通过将两个摄像模组4分别位于透明载物板1的两侧上方,以拍摄待测物正面的闭合光圈的图像,一个摄像模组4位于透明载物板1的下方,以拍摄待测物底部的闭合光圈的图像,进而实现采集当前闭合光圈完整的图像。相对于采用两个摄像模组4一上一下地拍摄当前闭合光圈完整的图像,本实施例采用三个摄像模组4拍摄当前闭合光圈完整的图像,由于拍摄视野的边缘会重叠,因此能确保拍摄出闭合光圈360°完整的图像,有效避免闭关光圈所反映的深度信息丢失,且由于数量小,利于后续的图像拼接。
更优地,各个所述摄像模组4分别包括相机41和反射镜面42,各个所述反射镜面42位于所述移动平台2的同一端,各个所述相机41位于所述移动平台2的另一端;所述反射镜面42用于将当前闭合光圈的图像反射至同组的所述相机41;所述相机41用于采集所述反射镜面42反射的图像。如此,如图1所示,通过反射镜面42发射闭合光圈的图像供相机41采集,实现改变光路,利于在保证完整采取闭合光圈的图像的前提下,减小本系统安装相机41的占用空间。同时更好地实现相机41的主光轴与光截面31形成一定角度,以方便相机41拍摄到闭合光圈。
具体地,如图1所示,所述移动平台2呈凵形,所述移动平台2的两侧为透明侧壁,所述透明载物板1位于所述移动平台2底部的上方;位于所述透明载物板1上方的所述摄像模组4分别设置在所述透明侧壁的外壁面,所述激光发射器3设置在所述透明侧壁的内壁面;位于所述透明载物板1下方的所述摄像模组4设置在所述移动平台2的内侧底部。如此,通过将两侧的摄像模组4设置在透明侧壁的外壁面,两侧的激光发射器3设置在透明侧壁的内壁面,既实现位于透明载物板1两侧的摄像模组4和激光放射器安装在移动平台2的两侧透明侧壁上,又有效避免激光发射器3阻碍摄像模组4拍摄出闭合光圈的图像,利于提高得到待测物三维信息的精确度。
值得说明的是,还包括机架5,所述机架5具有线性驱动组件51;所述透明载物板1水平设置在所述机架5的顶端面;所述线性驱动组件51用于驱动所述移动平台2移动。如此,通过线性驱动组件51驱动移动平台2移动,实现光截面31完整地扫过待测物,得到待测物完整的三维信息。具体地,所述线性驱动组件51可以是直线导轨、直线运动模组或滚珠丝杠直线传动机构中的一种。优选地,线性驱动组件51为由伺服电机驱动的滚珠丝杠直线传动机构,控制方便且运动稳定,利于控制待测物每一截面之间的间距大小,提高得到待测物三维信息的精确度。
优选地,所述摄像模组4的主光轴与所述光截面31之间的角度为20°~60°。具体地,若小于20°,摄像模组4拍摄出的激光光圈趋向直线,激光条纹反映的轮廓信息容易失真,若大于60°,摄像模组4的主光轴容易被待测物的凸面所阻挡,导致摄像模组4不能采集到完整的闭合光圈。因此,优选摄像模组4的主光轴与光截面31之间的角度为20°~60°。
优选地,所述透明载物板1为玻璃板或亚克力板中的任一种。
优选地,所述相机41为CCD相机41。CCD相机41作为摄像模块中的相机41,具有体积小、重量轻、不受磁场影响且具有抗震动和撞击的优点,有效避免摄像模组4拍摄的图像失真,提高得到待测物三维信息的精确度。
如图2所示,本发明还公开了一种用于异形体重建的多组线结构光视觉方法,应用在上述的一种用于异形体重建的多组线结构光视觉系统,包括以下步骤:
系统全局标定,即对摄像模组4、激光发射器3以及激光光点进行标定,确定三者之间的角度和以及距离,建立图像坐标系和现实空间坐标之间的映射关系;
多个激光发射器3发射激光条纹形成光截面31,多个摄像模组4从不同角度采集当前闭合光圈的图像;
图像拼接处理器收集各个摄像模组4采集的图像,并从每个摄像模组4采集的图像中提取出激光条纹的中心线,根据映射关系计算出中心线的点在现实空间坐标下对应的三维坐标,即得到轮廓信息;
图像拼接处理器将多个轮廓信息进行拼接,对拼接后的轮廓信息进行曲线拟合,得出当前闭合光圈完整平滑的轮廓信息;
移动平台2线性移动,对待测物的下一截面进行扫描,得出下一截面闭合光圈完整平滑的轮廓信息,直至得出整个待测物的三维模型。
通过多个激光发射器3在透明载物板1上方和下方的同一平面发射出激光条纹,当光截面31扫过待测物时,多道激光条纹配合实现360°照射在待测物体上,同时形成闭合光圈,实现多条激光条纹能反映出待测物当前截面完整的深度信息,即待测物的轮廓信息。再通过多个摄像模组4在透明载物板1的上方和下方采集闭合光圈当前完整的图像,图像拼接处理器基于线结构光三维重建原理和图像拼接原理,从各个摄像模组4采集的图像中提取出激光条纹的中心线进行计算得到多个轮廓信息,并对多个轮廓信息进行拼接以及曲线拟合,得出当前闭合光圈完整平滑的轮廓信息。随着移动平台2往同一方向移动使光截面31完整地扫过待测物,图像拼接处理器依次的计算得到待测物每一截面的轮廓信息,从而精确地得到待测物完整的三维信息。
优选地,图像拼接处理器提取激光条纹的中心线之前还进行图像预处理步骤,所述图像预处理步骤包括图像滤波、图像分割和特征提取。如此,通过先对摄像模组4收集得到的图像进行图像滤波、分割以及特征提取,以提高后续图像处理和分析的有效性和可靠性。
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
- 一种用于异形体重建的多组线结构光视觉系统及方法
- 一种用于异形体重建的多组线结构光视觉系统