一种可自动切割分离工件装置
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及拆解设备领域,尤其涉及一种可自动切割分离工件装置。
背景技术
压缩机是很多家用电器的常用部件,如冰箱、空调等,现阶段生活质量的提高对该类电器的需求量越来越大,电器更新的速度也越来越快,由于压缩机中有很多可以再利用的零件,在压缩机报废后需要对其进行合理拆解,以便达到零件的重复利用,节省成本和资源。传统的拆解作业一般由人工和机械手协作完成该项工作,但是这种拆解方式导致效率低,并且操作人员在工作时会被迫吸入一定量的烟尘,和一定程度的强光辐射,对工人的身体健康有一定程度的危害,也不能用于大批量加工;目前市场上也有利用液氮低温破碎的方式,但这一种方式会损坏拆解下来的可再利用零件,很大程度上降低了这些零件的再利用率。
发明内容
本发明解决的一个技术问题是传统方法效率低,对拆解的零件有损坏,且对操作人员的健康不利,通过本发明提供的一种自动切割分离分拣装置,能够对不同规格型号的压缩机进行切割,并进一步对切割后的各部分进行分离分类分拣,有效的对废料进行回收利用。
本发明采用的技术方案是:一种可自动切割分离工件装置,包括有步进电机、链条和链轮,所述链轮的轴上设有电机,还包括夹紧机构和切割分离机构,所述夹紧机构和切割分离机构通过两个垂直模组固定板相连接;
夹紧机构包括夹紧组件IV,所述夹紧组件IV通过连接套与步进电机相连,所述夹紧组件IV通过轴承套接有夹紧组件II,所述夹紧组件IV上固接有夹紧组件Ⅰ,所述夹紧组件IV和夹紧组件I之间设有活动球,所述夹紧组件Ⅰ上设有弹性组件,所述夹紧组件Ⅰ的两端均固接有夹紧组件VI,所述两个夹紧组件VI的孔中均设有夹紧凸轮,所述夹紧凸轮的长柄端与夹紧推杆相抵靠,所述夹紧凸轮的短柄端与夹紧组件II相抵靠,所述夹紧凸轮通过放松弹簧与弹性组件相连,所述夹紧推杆固接在垂直模组固定板上,所述垂直模组固定板上设有传感器,所述垂直模组固定板的上端固接有成对夹紧气缸,下端固接有成对的放松气缸,所述放松气缸通过垂直模组固定板与放松推杆相连;
切割分离机构包括割枪夹架和割枪,所述割枪夹架固接在水平模组上,所述割枪夹架上设有距离传感器,所述水平模组上设有水平模组滑块,所述水平模组下端固接有水平模组固定板,所述夹紧气缸上固接有垂直模组,所述水平模组固定板和垂直模组的间隔中设有垂直模组滑块。
作为本发明的进一步改进,所述夹紧组件Ⅳ下端设为扁方状。
作为本发明的进一步改进,所述连接套上设有通槽。
作为本发明的进一步改进,所述夹紧组件II上设有凹槽。
作为本发明的进一步改进,所述夹紧组件Ⅰ上设有方形孔槽。
作为本发明的进一步改进,所述夹紧凸轮为互成135°的两平面。
作为本发明的进一步改进,所述弹性组件由夹紧滑块Ⅰ、弹簧和夹紧滑块Ⅱ构成,所述夹紧滑块I通过弹簧与夹紧滑块Ⅱ相连。
作为本发明的进一步改进,所述夹紧滑块Ⅱ端面设有V型槽。
作为本发明的进一步改进,所述夹紧滑块Ⅰ侧面开有通槽。
本发明具有的有益效果:本装置具有能够稳定快捷对工件进行切割分拣,节省了人力资源,提高了工作效率的有益效果;且能耗低,安全可靠,对装置维护时方便拆装,减少了环境污染和提高了对操作人员的保护。
附图说明
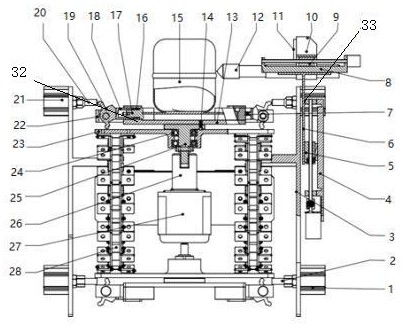
图1为本发明结构示意图主视图。
图2为本发明结构示意图右视图。
图3为本发明弹性组件示意图。
图4为本发明夹紧凸轮示意图。
图中所示: 1. 放松气缸,2. 放松推杆,3. 垂直模组固定板,4. 垂直模组,5. 垂直模组滑块,6. 水平模组固定板,7. 放松弹簧,8. 水平模组,9. 水平模组滑块,10. 割枪夹架,11. 距离传感器,12. 割枪,13. 夹紧组件Ⅰ,14. 活动球,15. 工件,16. 弹簧,17.夹紧滑块Ⅱ,18. 夹紧滑块Ⅰ,19. 夹紧凸轮,20. 夹紧推杆,21. 夹紧气缸,22. 夹紧组件Ⅵ,23. 夹紧组件Ⅱ,24. 轴承,25. 夹紧组件,26. 连接套,27. 步进电机,28. 链条,29.电机,30. 链轮,31. 传感器,32.夹紧机构,33.切割分离机构,1901.长柄端,1902.短柄端。
具体实施方式
下面结合附图,对本发明做进一步的说明。
如图所示,一种可自动切割分离工件装置,包括动力部件、夹紧机构32和切割分离机构33,动力部件有步进电机27、链条28、链轮30和链轮30轴上的电机29,链轮30带动链条28运动。夹紧机构32包括夹紧组件IV 25,夹紧组件IV 25通过连接套26与步进电机27相连,组成一种直线滑入滑出又能传递扭矩的扁方隼机构。夹紧组件IV 25上套有轴承24,轴承24上套有夹紧组件II 23,夹紧组件Ⅰ 13固定连接在夹紧组件IV 25上,夹紧组件Ⅰ13和夹紧组件IV 25中间设有活动球14,活动球14起到定位作用,不让夹紧组件IV 25在不与连接套26相接时转动。夹紧组件Ⅰ13中嵌有两个夹紧滑块Ⅱ 17,夹紧滑块Ⅱ 17通过弹簧与夹紧滑块Ⅰ18相连,工件15固定连接在夹紧滑块Ⅱ 17上。夹紧组件VI 22固定连接在在夹紧组件Ⅰ 13的二端,两端的二个夹紧组件VI 22的孔中均装有夹紧凸轮19,夹紧凸轮19的长柄端与夹紧推杆20抵靠,短柄端与夹紧组件II 23抵靠,其夹紧凸轮(19)本身又通过放松弹簧7与弹性组件相连接,有效的保护机构不会因强压导致损坏,夹紧推杆20固定安装在垂直模组固定板3上,垂直模组固定板3上装有传感器31,两个垂直模组固定板3的上端固定安装有成对夹紧气缸21,下端固定安装有成对的放松气缸1,放松气缸1在垂直模组固定板3的另一侧有对应的放松推杆2。切割分离机构33包括有割枪夹架10和割枪12,割枪夹架10固定安装在水平模组8上,并在割枪夹架10上设有距离传感器11。水平模组8上装有一个水平模组滑块9,水平模组8下端装有水平模组固定板6,夹紧气缸21上还固定连接有垂直模组4,水平模组固定板6和垂直模组4中间的间隔里设有垂直模组滑块5,垂直模组滑块5在其中可滑动。
进一步的,夹紧组件Ⅳ下端设为扁方状。
通过采用上述技术方案,与连接套上的通槽相配合,即方便夹紧组件IV和连接套之间可以直线滑入或滑出,又能更好的传递扭矩。
进一步的,连接套上设有通槽。
通过采用上述技术方案,与夹紧组件Ⅳ下端相配合,便于夹紧组件Ⅳ直线滑入滑出。
进一步的,夹紧组件II上设有凹槽。
通过采用上述技术方案,提供给活动球一个凹坑,起到定位作用,使在夹紧组件IV与连接套未相接时,不发生转动。
进一步的,夹紧组件Ⅰ上设有方形孔槽,。
通过采用上述技术方案,便于夹紧滑块II在夹紧组件Ⅰ的方形孔槽中自由滑动。
进一步的,夹紧凸轮为互成135°的两平面。
通过采用上述技术方案,使两平面到凸轮的回转中心不等,使其可以自锁,并且夹紧凸轮上双柄的存在减小了推杆在圆弧面上滑动摩擦力。
进一步的,弹性组件由夹紧滑块Ⅰ、弹簧和夹紧滑块Ⅱ构成,所述夹紧滑块I通过弹簧与夹紧滑块Ⅱ相连。
通过采用上述技术方案,使得夹紧机构具有弹性夹紧效果,进一步保证夹紧时,机构不会因强压导致损坏。
进一步的,夹紧滑块Ⅱ端面设有V型槽。
通过采用上述技术方案,工件底板夹在V形槽中与下面零件会形成间隙,可以容渣,在工件底板产生变形时,也能很好的夹紧工件。
进一步的,夹紧滑块Ⅰ侧面开有通槽。
通过采用上述技术方案,便于使用销钉穿过夹紧滑块Ⅰ的通槽,装在夹紧滑块Ⅱ另一端的圆柱面上,并且便于放置弹簧。
具体工作方式:在夹紧滑块Ⅱ 17上装上工件15即压缩机壳体后,打开电机29,此时压缩机壳体随着链条28的运动轨迹移动。当压缩机壳体移动到传感器31的感应区时,传感器31对压缩机壳体进行判断有无和测高,并把数据传输到工控系统,工控系统随即对数据进行处理,通过电磁阀使夹紧气缸21带动夹紧推杆20做伸出运动。夹紧推杆20推动夹紧凸轮19与之接触部分,夹紧凸轮19装在夹紧组件Ⅵ 22的孔中,沿孔的中心线做顺时针旋转,夹紧凸轮的长径面逐渐靠近吻合夹紧滑块Ⅰ 18,利用凸轮的长短径原理,同时推动夹紧滑块Ⅰ 18向右移动。夹紧滑块Ⅰ 18通过与之接触的弹簧16推动夹紧滑块Ⅱ 17夹紧压缩机壳体底板,由于夹紧凸轮19的长径圆周表面制成平面,且凸轮的回转中心线与平面的垂线在平面内,当此平面与夹紧滑块Ⅰ 18吻合后,在弹簧16的压力下,达到自锁的效果。割枪12与距离传感器11一同固定在割枪夹架10上,割枪夹架通过螺栓固定在水平模组滑块9上,水平模组滑块9可在水平模组8上左右滑动,水平模组8固定在与垂直模组滑块9相连的水平模组固定板6上。这样,割枪12与距离传感器11就可以根据工控系统给出的运动轨迹上下左右移动。根据压缩机壳体的外形大小,距离传感器11实时的把数据反馈给工控系统,工控系统根据此数据和传感器传输的数据调整割枪12的运动轨迹。同时工控系统启动步进电机27,带动连接套26,克服活动球14的摩擦力,连同夹紧组件II 23、夹紧组件Ⅰ 13和夹紧组件IV25旋转。等离子切割机及其控制系统开始工作,对压缩机壳体进行切割。旋转一周,切割结束,夹紧组件IV 25的扁方状从连接套26的通槽中滑出。活动球14压到夹紧组件Ⅱ 23的凹槽中,起到定位作用,使得夹紧组件IV 25在不与连接套26相接时,不发生转动。压缩机壳体继续向右移动,移动到齿轮圆周旋转时,由于重力作用,被割开的上盖部分落入另一下序工作的皮带机上。继续旋转到压缩机壳体被割开壳体的口朝下时,内芯部分,随重力作用落入另一下序工作的皮带机上。当压缩机壳体口朝下的向左移动到与放松气缸1相对时,放松气缸1做伸出运动,放松推杆2推动夹紧凸轮19与之接触部分,夹紧凸轮19长径面逐渐旋出,短径面逐渐旋入,由于短径面是一个平面,且凸轮轴心线与短径面的垂线在短径面内,当断径面与夹紧滑块Ⅰ的平面完全接触后,达到自锁的效果。夹紧滑块Ⅰ 18和夹紧滑块Ⅱ 17在放松弹簧7的作用下,跟着夹紧凸轮19圆周的变化而向后滑动,放松压缩机壳体余下部分,压缩机壳体余下部分在重力作用下落入另一下序工作的皮带机上。以此类推,压缩机壳体的切割分离分拣流程循环进行。
本装置具有能够稳定快捷对工件进行切割分拣,节省了人力资源,提高了工作效率的有益效果;且能耗低,安全可靠,对装置维护时方便拆装,减少了环境污染和提高了对操作人员的保护。
本领域技术人员应当知晓,本发明的保护方案不仅限于上述的实施例,还可以在上述实施例的基础上进行各种排列组合与变换,在不违背本发明精神的前提下,对本发明进行的各种变换均落在本发明的保护范围内。
- 一种可自动切割分离工件装置
- 用于借助于激光分离切割分离工件的边缘部段的方法以及配属的激光切割装置