用于照亮车辆的侧向区域的照明系统和方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及一种用于照亮车辆的侧向区域的照明系统以及一种用于辅助驾驶机动车辆的系统。本发明还涉及这样的机动车辆,该机动车辆包括这种照明系统或这种辅助系统。本发明还涉及一种用于照亮车辆的侧向区域的照明方法以及一种用于辅助驾驶汽车的方法,这些分别通过所述照明系统和辅助系统来实现。
背景技术
随着自主机动车辆的发展,有必要在所有的照明条件下提高驾驶员辅助,尤其是为了管理各种特定的驾驶功能,包括以下功能:
-“车道保持”,该功能允许车辆在道路上沿着其车道,这特别通过检测在路径上的任何偏差并将偏差发信号给驾驶员来实现;
-“车道对中”,该功能补充前面的功能,该功能更精确地使得车辆自主地保持在其车道中间,
-“改变车道”,该功能允许车辆改变车道,例如以便超车,
-“自主紧急制动”(或更简单地说是AEB),
-“自主紧急转向”(或更简单地说是AES),该功能允许避免障碍物出现在车道中,
-“停车辅助”和“自主停车”。
在这些各种功能中,辅助系统需要接收输入信息,特别是包括关于检测地面标记的信息,例如车道边界线和/或道路上任何障碍物的存在。该检测必须能够在所有条件下进行,尤其是能够在夜间进行。
应注意的是,现有的车辆照明在车辆自身的车道相距两米的距离和相邻车道相距五米的距离照亮车辆前方的道路。
但是,照亮车辆旁边的区域更加困难,这是因为照明必须覆盖与车辆相邻的整个矩形区域,该区域从车辆延伸几厘米到几米,并且延伸大约十米的长度。该待照亮区域的角度范围使得很难均匀地照亮整个区域。
这些限制意味着,目前,即使不是不可能,也很难甚至不能检测到车辆附近的某些地面标记或障碍物,特别是侧向区域中的地面标记或障碍物,这妨碍了提供能够执行自主车辆所需的上述功能的辅助系统。
发明内容
本发明的目的是提供一种用于照亮车辆的侧向区域的照明系统和方法,该系统和方法弥补上述缺点并改进用于辅助驾驶机动车辆的系统和方法,并且特别是允许该系统和方法执行上述辅助功能,从而使该系统和方法适合于辅助自主车辆。
另外,本发明的目的是,提供一种用于照亮和辅助驾驶机动车辆的解决方案,该解决方案简单且可靠,同时不会产生过高的额外成本。
为此,本发明涉及一种用于照亮车辆的侧向区域的系统,该系统包括能够发射第一光束的后部第一发光模块和能够发射第二光束的前部第二发光模块。第一发光模块和第二发光模块被布置成,使得它们各自的光束定向为朝向彼此。
在一个实施例中,第一光束定向为沿第一主发射轴线,并且第二光束定向为沿第二主发射轴线。第一主发射轴线和第二主发射轴线的在水平面上的投影相交。
在一个实施例中,两个发光模块被放置成使得它们的光束能够在交叠区域中交叉,该区域由交叉点所界定,所述交叉点位于距车辆50cm至5m范围内的距离处。
在一个实施例中,第一发光模块和第二发光模块以彼此之间大于15cm的距离放置。
在一个实施例中,第一发光模块和/或第二发光模块包括至少一个红外光源,优选地包括近红外光源。
本发明还涉及一种用于辅助驾驶车辆的系统,该系统包括根据本发明的照明系统和至少一个图像捕获装置,例如静止照相机或摄像机。
本发明还涉及一种车辆,尤其是机动车辆,包括根据本发明的照明系统或根据本发明的用于辅助驾驶车辆的系统。
在一个实施例中,第一发光模块被放置在车辆的后部部分,并且第二发光模块被放置在车辆的前部部分,并且第一主发射轴线定向为朝向车辆的前部部分,并且第二主发射轴线定向为朝向车辆的后部部分。
在一个实施例中,第一发光模块和/或第二发光模块被放置在车辆的底部部分上,优选地以离地面在20cm至50cm的范围内的距离来放置。
在一个实施例中,车辆还包括图像捕获装置,该图像捕获装置被布置成获取车辆的侧向区域的图像。
本发明还涉及一种用于照亮车辆的侧向区域的照明方法。所述照明方法包括通过后部第一发光模块发射第一光束的步骤和通过前部第二发光模块发射第二光束的步骤。这两个光束朝向彼此对准。
最后,本发明涉及一种用于辅助驾驶车辆的方法,该方法包括实施根据本发明的照明方法,以及捕获车辆的由两个光束中的至少一个光束照亮的侧向区域的图像的步骤。
附图说明
本发明的这些目的、特征和优点将在下面参照附图对特定的非限制性实施例的描述中进行详细描述,其中:
图1示意性地示出配备有根据本发明的一个实施例的照明系统的车辆的俯视图。
图2示出配备有根据本发明的实施例的照明系统的车辆,其中仅接通第一发光模块的照明。
图3示出配备有根据本发明的实施例的照明系统的车辆,其中仅接通第二发光模块的照明。
图4示出根据本发明的实施例的照明系统的两个发光模块的主发射轴线。
图5示出配备有根据本发明的一个实施例的照明系统的车辆的侧视图。
图6示出根据本发明的一个实施例的车辆和车辆的待照明的侧向区域的俯视图。
具体实施方式
为了便于描述,如常规的,将从车辆的后部延伸到车辆的前部的方向、即车辆向前移动的方向称为纵向方向。该方向在附图中由箭头A示出。在由车辆所处的平面所限定的水平面中,将与纵向方向垂直的方向称为横向方向。最后,将垂直于前两个方向并且向上定向的方向称为竖直方向。
下面参照图1至图6描述根据一个实施例的配备有用于照亮侧向区域的系统的车辆2的示例。车辆2优选地是机动车辆,例如汽车或卡车。该车辆包括侧向侧面21。该车辆配备有根据本发明的一个实施例的照明系统1,该照明系统1允许照亮车辆的邻近或靠近该侧向侧面21的侧向区域5。如图6所示,车辆2的该侧向区域5可以由与车辆相邻的矩形区域限定或位于小于或等于10cm、优选地小于或等于5cm的距离处。侧向区域5优选地是地面上的区域,即搁置车辆2的水平面的一部分。如图6所示,待照亮的侧向区域5可以在大约20m的长度和大约5m的宽度延伸。
照明系统1包括后部第一发光模块3和前部第二发光模块4。由发光模块3、4发出的光可以是可见光或红外光。红外光对于人眼是不可见的,因此允许发光模块3、4发出符合现行法规的光束。优选地,由发光模块3、4发出的光可以是其辐射覆盖近红外波长的光。具体而言,使用近红外光是有利的,因为除了允许形成人眼不可见的光束并因此符合现行法规外,通常用于检测可见光的传感器对于近红外光也是敏感的,而这些传感器对其余的红外波段不敏感。因此,发射近红外光使得可以不使用专门设计的传感器来捕获红外光。近红外是指波长在0.7μm至2.5μm的范围内的辐射或在0.7μm至1.1μm的范围内的辐射。
放置发光模块3、4以用于照亮车辆2的侧向区域5。放置发光模块3、4以用于照亮地面。
如图2所示,第一发光模块3沿着第一主发射轴线8发射第一光束7。该第一光束7基本上被包括在圆锥形体积中,该圆锥形体积的轴线是第一主发射轴线8。由第一发光模块3照亮的地面的区域由阴影线区域表示。应当注意,由于光束的竖直发射角和第一发光模块3的高度,第一光束7在最初的几厘米内不接触地面。
“竖直发射角”是指光束在竖直平面上的张角。相反,“水平发射角”是指光束在水平面上的张角。
如图3所示,第二发光模块4沿着第二主发射轴线10发射第二光束9。该第二光束9基本上被包括在圆锥形体积中,该圆锥形体积的轴线是第二主发射轴线10。由第二发光模块4照亮的地面的面积由阴影线区域表示。
光束必须理解为全部从同一光源或同一点输出的一组光线。主发射轴线是穿过光束的光源的轴线,在该轴线上从光源输出的光强度最高。如前所述,光束的所有的光线基本上都包含在围绕主发射轴线形成的圆锥形体积中。
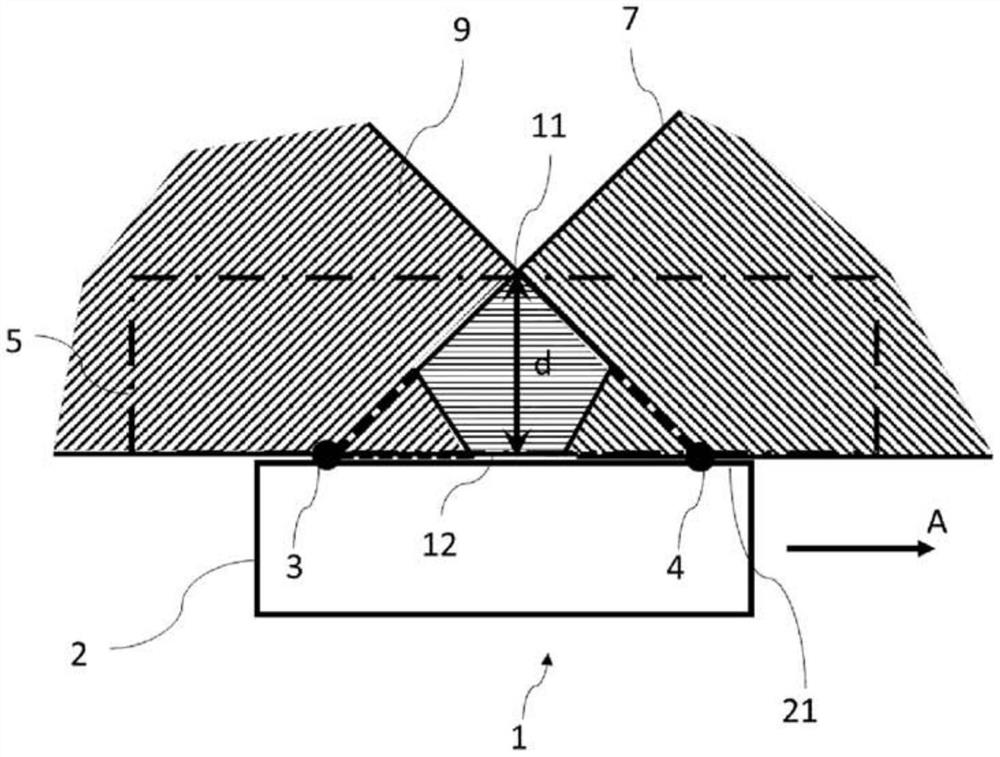
根据本发明的实施例,后部第一发光模块3的第一光束7向前定向。前部第二发光模块4的第二光束9向后定向。因此,两个光束7、9定向为朝向彼此。因此,两个光束7、9特别是在车辆附近相交,即,每个光束的光线中的至少一些光线相交,使得两个光束7、9在位于两个发光模块之间的交叠区域12中交叠。在光束在道路平面上的水平投影中,该交叠区域12具有三角形形状,该三角形形状由交叉点11界定,该交叉点是所述交叠区域12中距车辆2最远的点。
换句话说,主发射轴线8、10定向为朝向彼此。主发射轴线交叉,使得第一光束7朝向第二模块4定向,或第二模块朝向第一光束定向。因此,在两个发光模块3、4在竖直方向上具有相同高度的实施例中,第一主发射轴线8和第二主发射轴线10相交。如果这两个发光模块3、4在竖直方向上具有不同的高度或不同的定向,则它们的主发射轴线8、10处于不同的高度上,但是它们在水平面上的投影相交,特别地如图4中所示。
第一发光模块3和第二发光模块4被布置成,使得上面限定的交叉点11位于侧向侧面21附近。所述交叉点11与车辆2的侧向侧面21之间的距离d优选为在50cm至5m的范围内,非常优选地在4m至5m的范围内。如图1所示,该距离有利地至少对应于到侧向区域5的平行于车辆并且距车辆最远的一侧的距离,以便覆盖侧向区域5的全部。如图4所示,第一主发射轴线8和第二主发射轴线10(或它们在水平面上的投影)在汇合点13相交。所述汇合点13与车辆2的侧向侧面21之间的距离m优选在25cm至2m的范围内,非常优选地在50cm至1m的范围内。
在一个实施例中,第一主发射轴线8与车辆2的侧向侧面21成15°至35°的范围内的角度α,优选地成20°至25°的范围内的角度α。
在一个实施例中,第二主发射轴线10与车辆2的侧向侧面21形成角度β,该角度β在165°至145°的范围内,优选地在160°至155°的范围内。
第一发光模块3和第二发光模块4可以分开大于15cm的距离,优选地分开15cm至4.5m的范围内的距离。两个发光模块之间的该距离有利地允许对车辆2的侧向区域5的包括在两个发光模块之间的部分以及侧向区域的朝向车辆2的前部和后部定位的部分进行最佳照明。
第一发光模块3和第二发光模块4可以放置在车辆的底部,即,放置在车辆的更靠近地面的部分上。地面与第一发光模块3和/或第二发光模块4之间的距离优选在20cm至50cm的范围内。
该底部地面位置允许减小发光模块与光束到达地面的第一点之间的距离。因此可以使用具有较小的竖直发射角的发光模块。
从图1中可以清楚地看到,发光模块因此被布置成,使得发光模块的光束覆盖整个侧向区域5。因此,第一发光模块3和第二发光模块4的这种布置特别有利地允许照亮车辆的侧向区域5位于两个发光模块之间的部分。这样的布置还允许照亮侧向区域5的部分的外围,特别是照亮朝向车辆2的侧向侧面21定向的外围部分。因此,以最小的强度照亮车辆2的侧向区域5的整个区域。
优选地,发光模块3、4被放置成使得光束分别包括平行于车辆的侧向侧面21的至少一个光线。
如图1所示,该布置有利地使得第一发光模块3可以照亮地面的在车辆的侧向侧面21附近位于第二发光模块4附近的部分。如上所述,由于第二光束9的竖直发射角和第二发光模块4的高度,该部分未被第二发光模块照亮。
同样,第二发光模块4照亮地面的在车辆的侧向侧面21附近位于第一发光模块3附近的部分。来自第一发光模块3的平行于车辆2的侧向侧面21的光线允许照亮地面的位于第二发光模块4下方的区域,或者来自第二发光模块4的平行于车辆2的侧向侧面21的光线允许照亮地面的位于第一发光模块3下方的区域。
因此,本发明有利地允许使用具有较小的水平发射角度的发光模块,同时允许照亮包括最靠近发光模块3、4的部分的整个侧向区域5。
在一个实施例中,第一发光模块3和/或第二发光模块4的水平发射角等于70°或在65°至75°的范围内。使发光模块交叉有利地允许减小发光模块的水平发射角。
应当注意,对于具有平行于且垂直于侧向侧面21定向的主发射轴线的发光模块,车辆的侧向侧面中距模块最远的部分会照明不充分。这种布置将需要具有至少等于180°的水平发射角的发光模块,这是更加昂贵的并且更难以制造。
此外要注意的是,在两个发光模块并排放置并且不交叉的情况下,发光模块的水平发射角将需要至少等于90°。
发光模块3、4可以被放置在车身的凹部中。具体地,由于本发明有利地允许通过其它模块照亮靠近发光模块的区域,因此可以使发光模块凹入以保护其免受冲击,从而不会影响侧向区域5的最靠近车辆的侧向侧面21的部分的照明。
本发明还涉及一种包括根据本发明的实施例的照明系统的辅助系统。该辅助系统还包括至少一个图像捕获装置6,例如静止照相机或摄像机。图像捕获装置6被布置成捕获车辆2的由照明系统1照亮的侧向区域5的图像或视频。图像捕获装置尤其允许既在白天期间也在夜间捕获在机动车辆附近的地面的图像,例如关于道路上的标记和障碍物的信息。
用于辅助驾驶的系统还包括中央单元,该中央单元可以对应于智能管理单元的任何硬件和/或软件装置,该中央单元包括至少一个计算机,例如包括一个或多个微处理器,以用于实现用于辅助驾驶的方法。该中央单元可以放置在机动车辆中或机动车辆上的任何位置处,并且可以例如集成到机动车辆的车载计算机中。作为变型方案,该中央单元可以位于图像捕获装置6内。用于辅助驾驶的系统因此包括用于检测地面上的标记和/或任何元素的装置,该装置由至少一个图像捕获装置和图像处理单元的组合形成。
辅助系统还包括通信装置,该通信装置将一个或多个相机连接到中央单元,以允许中央单元从相机接收图像。中央单元包括图像处理软件,以从中推导出驾驶员辅助所需的信息。因此,辅助系统通常还包括用于检测地面上的标记和/或障碍物和/或车辆的侧向区域中的任何元件的装置。辅助系统还包括通信装置,该通信装置将中央单元连接到发光模块和至少一个图像捕获装置6,以控制、激活和/或停用发光模块和至少一个图像捕获装置。
本发明还涉及一种车辆2,尤其是机动车辆,该车辆包括这种照明系统1和这种辅助系统。为此,如上所述,车辆2至少包括第一发光模块3和第二发光模块4。这些发光模块优选地布置在车辆的侧向侧面21上或侧向侧面的附近。
本发明还涉及一种用于照亮车辆2的侧向区域5的方法。
下面描述用于照亮车辆2的侧向区域5的方法的一种执行模式。
该方法包括通过放置在所述车辆2的后部部分上的第一发光模块3沿着第一主发射轴线8发射第一光束7的第一步骤。
该方法包括通过放置在所述车辆2的前部部分上的第二发光模块4沿着第二主轴线发射第二光束9的第二步骤。
如上所述,两个光束7、9定向为朝向彼此。
优选地,第一步骤和第二步骤同时执行。
另外,该辅助系统实现一种用于辅助驾驶的方法,该方法包括第一步骤,第一步骤包括根据所描述的照明方法通过上述一个或多个光束发射特定的照明。该辅助方法还包括捕获车辆2的侧向区域5的图像的步骤。
在发射第一光束7和/或第二光束9期间执行捕获图像的步骤。
该方法有利地允许产生车辆2的侧向区域5的图像,该图像的整个区域以足够的强度被照亮,以用于检测标记或障碍物或车道结构的改变。
- 用于照亮车辆的侧向区域的照明系统和方法
- 用于将机动车辆侧向周围环境区域中细长静止物体分类的方法、驾驶员辅助系统和机动车辆