一种自动剪引线机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及基板加工设备技术领域,更具体为一种自动剪引线机。
背景技术
基板是制造PCB的基本材料,一般情况下,基板就是覆铜箔层压板,单、双面印制板在制造中是在基板材料-覆铜箔层压板上,有选择地进行孔加工、化学镀铜、电镀铜、蚀刻等加工,得到所需电路图形。另一类多层印制板的制造,也是以内芯薄型覆铜箔板为底基,将导电图形层与半固化片交替地经一次性层压黏合在一起,形成3层以上导电图形层间互连。它具有导电、绝缘和支撑三个方面的功能。印制板的性能、质量、制造中的加工性、制造成本、制造水平等,在很大程度上取决于基板材料,基板在生产后有3条引线需要进行剪除。
然而,现有市场上的基板对引线进行裁剪的时候一般是使用人工进行操作,工作强度大,人工成本高,因为人的感官不同造成产品的品质无法得到保证,从而降低了产品的质量,也让工作的效率无法提高。为此,需要设计一个新的方案给予改进。
发明内容
本发明的目的在于提供一种自动剪引线机,解决了背景技术中所提出的问题,满足实际使用需求。
为实现上述目的,本发明提供如下技术方案:一种自动剪引线机,包括:装置本体,所述装置本体包括剪线模组、移载滑动机构、焊点高度检测机构、相机检测机构、卸料中转机构、卸料移载机构和机架,所述剪线模组、移载滑动机构、焊点高度检测机构、相机检测机构、卸料中转机构和卸料移载机构均安装在机架的中部,所述移载滑动机构安装在机架的中部前方且置于剪线模组的下方,所述焊点高度检测机构安装在移载滑动机构与剪线模组之间,所述相机检测机构固定在卸料中转机构的一侧,所述卸料中转机构固定在移载滑动机构的末端,所述卸料移载机构安装在卸料中转机构的上方。
作为本发明的一种优选实施方式,所述移载滑动机构上设置有上滑道、下滑道、托盘、上下升降气缸、滑台气缸一和双轴气缸,所述托盘活动连接在上滑道和下滑道中,所述上下升降气缸分别安装在上滑道、下滑道的两端,所述双轴气缸安装在移载滑动机构的侧壁上且端部延伸至上滑道内,所述滑台气缸一共设置有两个且分别安装在上滑道和下滑道的下方。
作为本发明的一种优选实施方式,所述剪线模组内安装有圆形气缸一、滑台气缸二、气动卡爪一、圆形气缸二和气动剪刀,所述气动卡爪一和气动剪刀分别设置有三个,所述滑台气缸二的端部与气动卡爪一连接,所述圆形气缸一的末端与滑台气缸二连接。
作为本发明的一种优选实施方式,所述圆形气缸二的端部向下延伸并连接有压块,所述压块的端部与气动剪刀连接。
作为本发明的一种优选实施方式,所述焊点高度检测机构内安装有滑台气缸三、高精度数字位移传感器一、高精度数字位移传感器二,所述高精度数字位移传感器一和高精度数字位移传感器二分别安装在固定架上,且固定架置于托盘的上方,所述滑台气缸三的端部与固定架连接,滑台气缸三推出后高精度数字位移传感器一检测三个锡焊点的最高处,高精度数字位移传感器二测量基板的上端面,高精度数字位移传感器一和高精度数字位移传感器二的高度差为三个锡焊点最高点和基板上平面的高度差。
作为本发明的一种优选实施方式,所述卸料中转机构上安装有工业相机、照明灯、圆形气缸三、滑台气缸四、气动卡爪二、步进电机和带导杆薄型气缸,所述工业相机安装在托盘的上方,所述照明灯固定在工业相机与托盘之间,所述圆形气缸三的端部与滑台气缸四连接,所述气动卡爪二与滑台气缸四的输出端连接,所述步进电机安装在气动卡爪二人的下方且步进电机的输出端与带导杆薄型气缸连接。
作为本发明的一种优选实施方式,所述卸料移载机构上连接有无杆气缸、滑台气缸五和气动卡爪三,所述滑台气缸五的输出端与气动卡爪三连接,所述滑台气缸五安装在无杆气缸上。
与现有技术相比,本发明的有益效果如下:
本发明,通过移载滑动机构可以对基板进行自动上料,将基板移动至剪线模组下方来进行剪线,剪线完成后移动到焊点高度检测结构下方,检测三个锡焊最高点和基板一平面的高度差,剪线合格,卸料移载机构上的卡爪抓取基板移动到下个工位中;剪线不合格,卸料中转机构直接将产品放入废料盒中。自动化剪线并检测,保证出品质量,降低人工成本。
附图说明
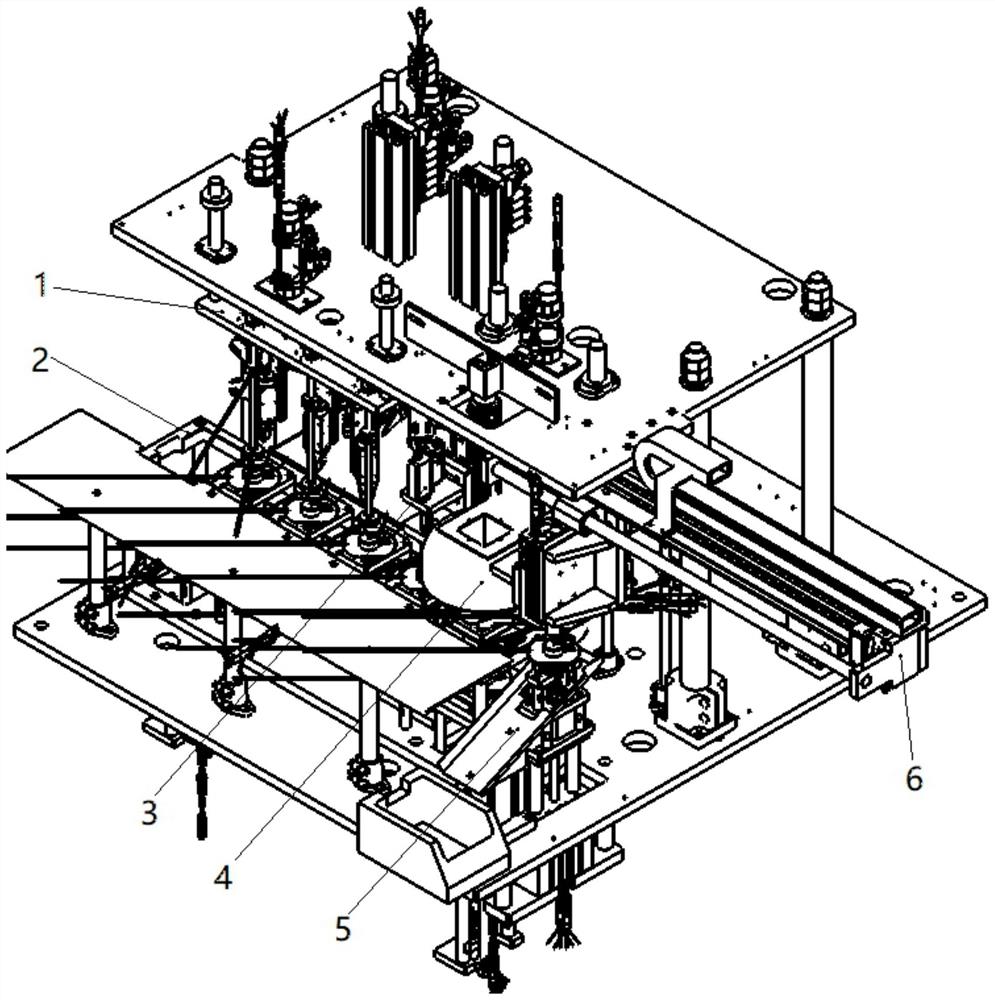
图1为本发明所述自动剪引线机的整体结构图;
图2为本发明所述自动剪引线机的去机架结构图;
图3为本发明所述移载滑动机构的结构图;
图4为本发明所述移载滑动机构的截面图;
图5为本发明所述移载滑动机构的俯视图;
图6为本发明所述剪线模组的结构图;
图7为图6中A的放大图;
图8为本发明所述剪线模组的局部结构图;
图9为本发明所述焊点高度检测机构的结构图;
图10为本发明所述卸料中转机构的结构图;
图11为本发明所述卸料移载机构的结构图。
图中:1、剪线模组;2、移载滑动机构;3、焊点高度检测;4、相机检测机构;5、卸料中转机构;6、卸料移载机构;7、托盘;8、上下升降气缸;9、滑台气缸一;10、双轴气缸;11、圆形气缸一;12、滑台气缸二;13、气动卡爪一;14、圆形气缸二;15、压块;16、气动剪刀;17、滑台气缸三;18、高精度数字位移传感器一;19、高精度数字位移传感器二;20、工业相机;21、照明灯;22、圆形气缸三;23、滑台气缸四;24、气动卡爪二;25、步进电机;26、带导杆薄型气缸;27、无杆气缸;28、滑台气缸五;29、气动卡爪三。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-11,本发明提供一种技术方案:一种自动剪引线机,包括:装置本体,装置本体包括剪线模组1、移载滑动机构2、焊点高度检测机构3、相机检测机构4、卸料中转机构5、卸料移载机构6和机架,剪线模组1、移载滑动机构2、焊点高度检测机构3、相机检测机构4、卸料中转机构5和卸料移载机构6均安装在机架的中部,移载滑动机构2安装在机架的中部前方且置于剪线模组1的下方,焊点高度检测机构3安装在移载滑动机构2与剪线模组1之间,相机检测机构4固定在卸料中转机构5的一侧,卸料中转机构5固定在移载滑动机构2的末端,卸料移载机构6安装在卸料中转机构5的上方。
如图3-5所示:移载滑动机构2上设置有上滑道、下滑道、托盘7、上下升降气缸8、滑台气缸一9和双轴气缸10,托盘7活动连接在上滑道和下滑道中,上下升降气缸8分别安装在上滑道、下滑道的两端,双轴气缸10安装在移载滑动机构2的侧壁上且端部延伸至上滑道内,滑台气缸一9共设置有两个且分别安装在上滑道和下滑道的下方。
(1)左边上下升降气缸8将下滑道的托盘7顶升,人工将基板放入顶升的托盘7上,上滑道下方的滑台气缸一9伸出将托盘7钩住往前推入上滑道;
(2)两个双轴气缸10伸出顶住托盘7,从而定位托盘7;
(3)右边的上下顶升气缸顶升接住上滑道滑过来的托盘7,之后下降;
(4)下滑道下方的滑台气缸一9伸出将托盘7钩住往前推入下滑道,之后循环重复(1)至(4)步骤。
如图6-8所示:剪线模组1内安装有圆形气缸一11、滑台气缸二12、气动卡爪一13、圆形气缸二14和气动剪刀16,气动卡爪一13和气动剪刀16分别设置有三个,滑台气缸二12的端部与气动卡爪一13连接,圆形气缸一11的末端与滑台气缸二12连接;圆形气缸二14的端部向下延伸并连接有压块15,压块15的端部与气动剪刀16连接。
(1)圆形气缸一11伸出,夹线结构下降,同时滑台气缸二12伸出,三个气动卡爪分别夹住第一个托盘7中基板的第一根引线,第二个托盘7中基板的第二根引线,第三个托盘7中基板的第三根引线;
(2)圆形气缸二14下降,剪线结构下降,三个压块15分别压住定位第一个托盘7中基板,第二个托盘7中基板,第三个托盘7中基板;最后三个气动剪刀16分别剪断第一个托盘7中基板的第一根引线,第二个托盘7中基板的第二根引线,第三个托盘7中基板的第三根引线;
(3)滑台气缸二12缩回,三个气动卡爪张开,将剪断的引线丢入下方的线盒中,圆形气缸1缩回,夹线结构上升;
(4)圆形气缸2缩回,剪线结构上升。
如图9所示:焊点高度检测机构3内安装有滑台气缸三17、高精度数字位移传感器一18、高精度数字位移传感器二19,高精度数字位移传感器一18和高精度数字位移传感器二19分别安装在固定架上,且固定架置于托盘7的上方,滑台气缸三17的端部与固定架连接,滑台气缸三17推出后高精度数字位移传感器一18检测三个锡焊点的最高处,高精度数字位移传感器二19测量基板的上端面,高精度数字位移传感器一18和高精度数字位移传感器二19的高度差为三个锡焊点最高点和基板上平面的高度差。
滑台气缸三17下降,高精度数字位移传感器一18测量三个锡焊点的最高处,高精度数字位移传感器二19测量基板上端面,从而高精度数字位移传感器一18和二的高度差即为三个锡焊点最高点和基板上平面的高度差,测完之后滑台气缸三17上升。
如图10所示:卸料中转机构5上安装有工业相机20、照明灯21、圆形气缸三22、滑台气缸四23、气动卡爪二24、步进电机25和带导杆薄型气缸26,工业相机20安装在托盘7的上方,照明灯21固定在工业相机20与托盘7之间,圆形气缸三22的端部与滑台气缸四23连接,气动卡爪二24与滑台气缸四23的输出端连接,步进电机25安装在气动卡爪二24人的下方且步进电机25的输出端与带导杆薄型气缸26连接。
(1)工业相机20拍照检测引线是否剪除合格、剪除的引线是否遗落在基板上;
(2)气动卡爪二24抓取产品,圆形气缸三22缩回,之后滑台气缸四23伸出,接着圆形气缸三22又下降,气动卡爪二24松开将基板放入卸料中转机构5;
(3)如果工业相机20拍照判断合格,基板等待卸料移载机构6抓取基板移走;如果相机拍照判断不合格,步进电机25旋转一定角度,之后带导杆薄型气缸26下降,基板会被滑道接住滑入废料盒内
具体地,卸料移载机构6上连接有无杆气缸27、滑台气缸五28和气动卡爪三29,滑台气缸五28的输出端与气动卡爪三29连接,滑台气缸五28安装在无杆气缸27上。
滑台气缸下降,气动卡爪抓取基板;滑台气缸上升,无杆气缸27移动到下一工位。
工作原理:
(1)基板上3条引线锡焊完之后,人工将基板放入移载滑动机构2中的托盘7上,并且移载滑动机构2推动托盘7往前移动;
(2)托盘7移动到剪线模组1结构下方时,三个夹线头分别夹住第一根引线,第二根引线和第三根引线,同时三个气动剪刀16分别剪除第一根引线,第二根引线和第三根引线;
(3)引线剪完之后,托盘7继续移动到焊点高度检测3结构下方,检测三个锡焊最高点和基板一平面的高度差;
(4)托盘7继续移动到相机检测下方,相机拍照检测引线是否剪除合格、剪除的引线是否遗落在基板上;
(5)拍照完成之后,卸料中转机构5上的卡爪抓取基板放入中转固定工装中。如果拍照合格,卸料移载机构6上的卡爪抓取基板移动到下个工位中;如果拍照判断不合格,卸料中转机构5直接将产品放入废料盒中。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自动剪引线机
- 一种可自动改变纬浮长线剪花间距的织物自动剪花织造一体机