一种基于远程控制的电动支架输送系统
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及医疗器械技术领域,具体地说,是一种基于远程控制的电动支架输送系统。
背景技术
二尖瓣关闭不全(Mitral Regurgitation,MR)是最为常见的瓣膜疾病,在一般人群中的发病率约1.7%,严重MR将严重损害心脏功能,增加心力衰竭的风险,严重威胁健康和寿命。重度MR患者的主要治疗方式为体外循环下二尖瓣瓣膜修复或置换术,该方法技术成熟,效果确切,但对于老年、严重心功能不全或者有严重合并症的患者风险大、死亡率高,无法进行手术。对于这些患者缺乏安全、微创、快速康复的瓣膜置换手段,仅依靠药物保守治疗,预后较差。经导管二尖瓣瓣膜置换术(Transcatheter Mitral Valve Implantation,TMVI)是近年来涌现的微创瓣膜置换技术,该技术通过心尖或者股动脉等途径进行瓣膜置换,让瓣膜置换像冠脉支架置入般微创,从而避免胸骨劈开、体外循环等创伤操作,具有低风险、微创和康复快的特点。TMVI将为高龄高危MR患者提供置换瓣膜的治疗机会,降低返流程度,避免心脏衰竭,从而获益。
由于二尖瓣的解剖结构的复杂性,目前所采用的支架输送器使用均为人工手动逐步释放,不能根据支架及病人的不同条件支架自动植入,操作过程复杂,无法精确无误,对手术医生要求很高,并且整个手术过程术者都要暴露在辐射之下,对手术医生身体产生损伤(本申请人已在先申请过相关方面的专利文献,申请号:2020109584189,申请日2020.9.14)。目前用于TMVI的瓣膜支架仍未成熟,TMVI的应用存在瓣膜定位困难、瓣膜移位,瓣膜突然释放等问题,可控性低,致失败率高,手术风险高,也容易导致瓣周漏、左心室流出道梗阻等并发症。
中国专利文献:CN201310417098.6,申请日2013.09.13,专利名称为:一种经导管植入的人工主动脉瓣支架及其输送系统。公开了一种经导管植入的人工主动脉瓣支架,包括支架和人工瓣膜,支架由弹性纤维状材料编制呈“哑铃状”结构,包括头部、腰部和尾部,在支架头部的外表面覆一层生物相容性薄膜,支架尾部设有安装锚。还提供一种用于输送该支架的输送系统,由外鞘、内芯、装载器、推送杆和固定头组成,其中支架尾部的安装锚安装于固定头,通过穿刺法将人工主动脉瓣支架输送到体内。
中国专利文献:CN201721155153.9,申请日2017.09.11,专利名称为:一种主动脉瓣膜支架输送系统及主动脉瓣膜系统。公开了一种主动脉瓣膜支架输送系统及主动脉瓣膜系统,包括用于输送主动脉瓣膜支架的推送释放装置,特别是,主动脉瓣膜支架输送系统还包括设置在推送释放装置前端的异形球囊导管,异形球囊导管包括球囊,球囊具有柱状连接部和与柱状连接部连通的球囊扩张部,柱状连接部与推送释放装置的前端连接,球囊被设计为:在扩张后所述的球囊扩张部在靠近所述的柱状连接部的一侧形成定位面,使用主动脉瓣膜支架输送系统时,所述球囊的球囊扩张部位于左心室流出道内并通过定位面与人体主动脉瓣的底部紧密贴合,起到定位以及减少和/或阻止瓣周漏的作用。
上述专利文献CN201310417098.6中的一种经导管植入的人工主动脉瓣支架及其输送系统,以及专利文献CN201721155153.9中的一种主动脉瓣膜支架输送系统及主动脉瓣膜系统,虽可实现主动脉瓣膜的输送,但是均为手动输送方式,故存在操作过程复杂和精准度低的问题。
综上所述,亟需一种可用于解决目前二尖瓣瓣膜置换技术上,设备操作复杂,精准度低,手术失败率高的问题,切实地减少患者的创伤、降低术者的难度、提高手术的成功率、减少术后的并发症,能够简化操作过程,保证二尖瓣瓣膜置入的精确定位以及精准释放,提高手术成功率,避免二次手术发生,为二尖瓣瓣膜置换技术的发展做出贡献的一种基于远程控制的电动支架输送系统,而关于该支架输送系统目前则没有相关的报道。
发明内容
本发明的目的是克服现有技术的不足,提供一种可用于解决目前二尖瓣瓣膜置换技术上,设备操作复杂,精准度低,手术失败率高的问题,切实地减少患者的创伤、降低术者的难度、提高手术的成功率、减少术后的并发症,能够简化操作过程,保证二尖瓣瓣膜置入的精确定位以及精准释放,提高手术成功率,避免二次手术发生,为二尖瓣瓣膜置换技术的发展做出贡献的一种基于远程控制的电动支架输送系统。
为实现上述目的,本发明采取的技术方案是:
一种基于远程控制的电动支架输送系统,所述基于远程控制的电动支架输送系统包括输送装置和远程控制装置;所述输送装置和远程控制装置组成操作端;所述远程控制装置由控制页面和控制装置组成;所述输送装置包括导头,内芯,外鞘,推送杆,放线装置,切线装置,瓣膜支架牵引线,收线装置,推送杆推送装置,内芯推送装置,安装座;所述导头设于内芯的顶端;所述内芯置于内鞘内部;所述推送杆设于外鞘的末端,且推送杆末端与推送杆推送装置相对;所述内芯推送装置设于内芯的末端,并与内芯位置相对;所述放线装置,切线装置,瓣膜支架牵引线和收线装置之间分别相互连接,且分别设于输送装置内部前端位置;所述安装座设于输送装置后段,且所述推送杆,推送杆推送装置和内芯推送装置均设于安装座表面;所述控制页面通过Microsoft Visual Studio C#平台开发,配合整个操作端使用;所述控制页面在PC机Windows系统下运行,远程传输患者个性化数据到操作端,控制操作端开始、急停、复位动作;所述控制装置由主控板、收线电机驱动、切线电机驱动、推送杆电机驱动、电源模块构成;所述控制装置采用32位高性能ARM Cortex-M3处理器;控制装置内部设有TCP连接管理模块,通过Wi-Fi与远程控制装置建立TCP连接,实现数据和指令的实时响应。
作为一种优选的技术方案,所述输送装置包含5个电机及相应机构,可在控制装置的控制下完成相应动作。
作为一种优选的技术方案,所述推送杆推送装置由推送杆齿条、推送杆齿轮、推送杆电机构成;推送杆齿条安装于推送杆末端,推送杆齿轮安装于推送杆电机输出轴上,与推送杆齿条啮合。
作为一种优选的技术方案,所述内芯包括一体式内芯头与内芯,内芯为中空结构;所述导头与内芯头通过螺纹连接;内芯推送装置由内芯推送齿条,内芯齿轮,内芯推送电机构成。
作为一种优选的技术方案,所述瓣膜支架牵引线一端连与人工瓣膜尾端,为回型线,另一端连与所述发动机所控制的收线装置,控制线在外鞘与推送杆之间通过,用于协助支架的释放。
作为一种优选的技术方案,所述切线装置由切线电机、平键、切线电机丝杆、刀座、刀头、切线挡板、切线挡板组成;装置安装在与外鞘相连的壳体中,切线刀头通过螺纹连接安装于切线刀座上,切线刀座通过键与刀座导轨实现定位;切线刀座通过螺孔与切线丝杆电机轴配合,构成丝杆滑块装置;当收线动作完成后,通过驱动丝杆切线电机正转或反转,可以使切线刀座与刀座导轨产生相对移动,使切线刀头伸出和收回,切断紧绷于收线滑轮组的瓣膜支架牵引线。
作为一种优选的技术方案,所述收线装置由收线卷筒、收线滑轮组和收线电装置成,所述放线装置由放线卷筒和放线滑轮构成;驱动收线电机转动收线时,左右收线卷筒转动,通过瓣膜支架牵引线带动左右放线卷筒,直至将两侧瓣膜支架牵引线拉紧。
作为一种优选的技术方案,所述输送系统还配套有机械臂,所述机械臂具有两个活动关节,可以调节伸展臂的角度和方向。
本发明优点在于:
1、远程控制:瓣膜输送系统手动逐步释放变为电动自动远程定位控制,减少辐射。
2、精准释放:个体化输入心脏瓣膜的相关数据,自动调节精准释放步骤及距离。
3、分阶段释放随时调整:分阶段分级释放瓣膜,预设释放步骤,多方面协调控制,在不同阶段可以重新调整或回收再次释放。
4、解决目前二尖瓣瓣膜置换技术上,设备操作复杂,精准度低,手术失败率高的问题,切实地减少患者的创伤、降低术者的难度、提高手术的成功率、减少术后的并发症,能够简化操作过程,保证二尖瓣瓣膜置入的精确定位以及精准释放,提高手术成功率,避免二次手术发生,为二尖瓣瓣膜置换技术的发展做出贡献。
附图说明
附图1为本发明推送装置及控制装置主视图。
附图2为本发明输送装置整体立体结构示意图。
附图3为本发明输送装置的前视图。
附图4为本发明输送装置的俯视图。
附图5为本发明导头与导芯的结构示意图。
附图6为本发明导头与推送杆的俯视图。
附图7为本发明推送杆头部截面图。
附图8为本发明控制页面的示意图。
附图9a-9g本发明支架输送系统分级分阶段释放示意图。
具体实施方式
下面结合实施例并参照附图对本发明作进一步描述。
附图中涉及的附图标记和组成部分如下所示:
100.导头 200.内芯
201.内芯头 300.外鞘
400.推送杆 401.推送杆头部
402.推送分割盘 500.放线机构
510.放线卷筒 520.放线滑轮组
600.切线机构 610.切线电机
620.切线电机丝杆 630.平键
640.刀座 650.刀头
660.切线挡板 670.切线挡板螺钉
700.瓣膜支架牵引线 800.收线机构
810.收线卷筒 820.收线滑轮组
830.收线电机 900.推送杆推送机构
910.推送杆齿条 920.推送杆齿轮
1000.内芯推送机构 1010.内芯推送齿条
1020.内芯齿轮 1030.内芯推送电机
1100.安装座 1200.瓣膜支架
1201.瓣膜支架勾脚 1300.外壳
1400.控制装置 1410.主控板
1420.收线电机驱动 1430.切线电机驱动
1440.推送杆电机驱动 1450.电源模块
1451.3V电源模块 1452.3.3V电源模块
1453.5V电源模块
实施例1
本发明的一种基于远程控制的电动支架输送系统,由输送装置和远程控制装置组成,远程控制装置由控制装置及控制页面组成,操作端则由控制装置和输送装置构成;所述控制页面通过Microsoft Visual Studio C#平台开发,可以在PC机Windows系统下运行,远程传输患者个性化数据到操作端,控制操作端开始、急停、复位等动作;控制装置采用32位高性能ARM Cortex-M3处理器,具有较高的数据处理能力;输送装置包含5个电机及相应机构,可在控制装置的控制下完成相应动作;控制页面与控制装置之间采用Wi-Fi通信,具有传输速率高、有效距离长的优点,且在无线路由器电波覆盖的有效范围内都可以实现通信;设备外观尺寸45cmx20cmx7.75cm,可安装在六轴机械臂上,通过开关电源连接普通插座,确保供电持续稳定;
为使本发明的技术方案及优点更加清楚明白,以下参数附图并举实施例,对本发明作进一步详细说明:
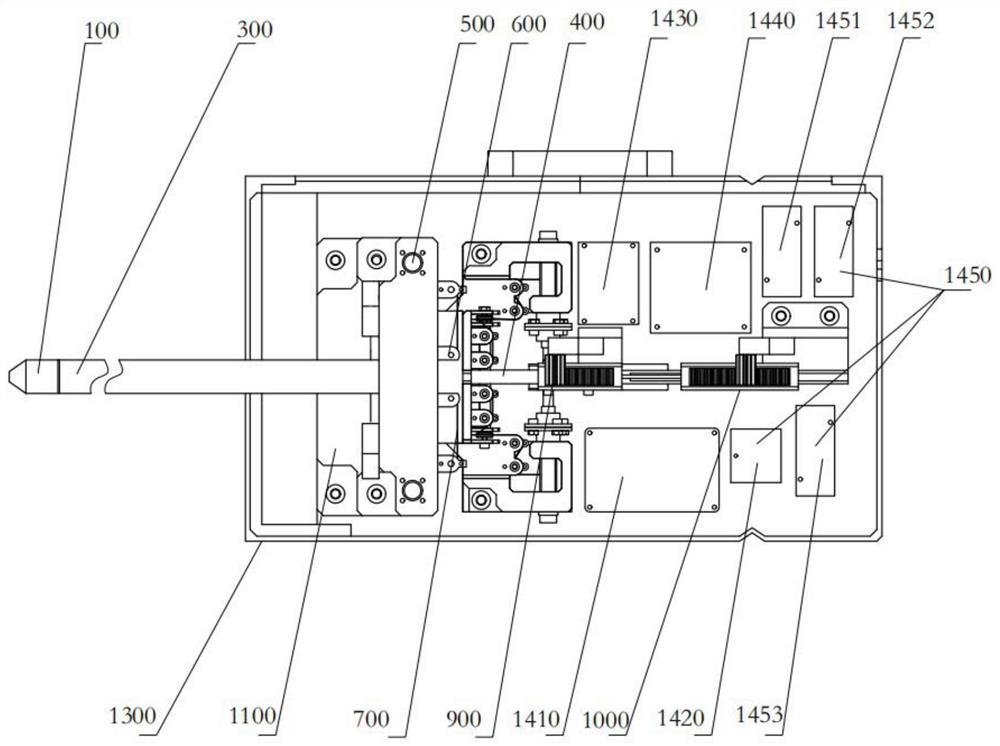
请参看附图1,图1为本发明推送装置及控制装置主视图。所述的输送装置由导头100,内芯200,外鞘300,推送杆400,放线装置500,切线装置600,瓣膜支架牵引线700,收线装置800,推送杆推送装置900,内芯推送装置1000和安装座1100构成;所述的控制装置1400由主控板1410、收线电机驱动1420、切线电机驱动1430、推送杆电机驱动1440和电源模块1450构成;其中,电源模块1450由3V电源模块1451、3.3V电源模块1452及5V电源模块1453组成;所述操作端由控制装置和输送装置构成;所述的主控板1410、收线电机驱动1420、切线电机驱动1430、推送杆电机驱动1440和电源模块1450分别呈对称结构设于推送装置的外鞘300内部末端;
请参看附图2,图2为本发明输送装置整体立体结构示意图。所述的输送装置由导头100,内芯200,外鞘300,推送杆400,放线装置500,切线装置600,瓣膜支架牵引线700,收线装置800,推送杆推送装置900,内芯推送装置1000和安装座1100构成;所述的导头100设于内芯200的顶端;所述的内芯200置于内鞘300内部;所述的推送杆400设于外鞘300的末端,且推送杆400末端与推送杆推送装置900相对;所述的内芯推送装置1000设于内芯200的末端,并与内芯200位置相对;所述的放线装置500,切线装置600,瓣膜支架牵引线700和收线装置800之间分别相互连接,且分别设于输送装置内部前端位置;所述的安装座1100设于输送装置后段,且所述的推送杆,推送杆推送装置900和内芯推送装置1000均设于安装座1100表面;
请参看附图3,图3为本发明输送装置的前视图。所述的推送杆推送装置900由推送杆齿条910、推送杆齿轮920、推送杆电机930构成;推送杆齿条910安装于推送杆400末端,推送杆齿轮920安装于推送杆电机930输出轴上,与推送杆齿条910啮合;所述内芯推送装置1000由内芯推送齿条1010,内芯齿轮1020,内芯推送电机1030构成;内芯推送齿条1010安装于内芯200末端,内芯齿轮1020安装于内芯推送电机1030的输出轴上,与内芯推送齿条1010相啮合;推送杆电机930与内芯推送电机1030都为蜗轮蜗杆电机,通过螺栓连接,安装于安装座1100上;驱动推送杆电机930与内芯推送电机1030,可带动推送杆齿轮920与内芯齿轮1020转动,使推送杆400和内芯200分别做往返运动;所述放线装置500由放线卷筒510和放线滑轮520构成;
请参看附图4,图4为本发明输送装置的俯视图。所述切线装置600由切线电机610、切线电机丝杆620、平键630、刀座640、刀头650、切线挡板660、切线挡板螺钉670组成;刀座640安装于安装架1100中,通过键620进行定位,通过切线电机610带动切线电机丝杆630转动使刀座640连同刀头650作横向进给运动,切线挡板660和切线挡板螺钉670起限位作用,切断瓣膜支架牵引线700后,切线电机610带动刀头650回撤;所述收线装置800由收线卷筒810、收线滑轮组820和收线电机830构成;
请参看附图5,图5为本发明导头与导芯的结构示意图。所述的内芯头201与内芯200一体,内芯200为中空结构;可更换导头100与内芯头201通过螺纹连接;导头100可根据手术需要与瓣膜共同更换,达到输送装置重复利用;
请参看附图6,图6为本发明导头与推送杆的俯视图。所述的瓣膜支架牵引线700左右各一股,推送杆头部401与推送分隔盘402上各分布四个线孔,当推送杆400推动瓣膜支架1200推出时,瓣膜支架牵引线700受力,带动左右放线卷筒510转动,经过两侧放线滑轮组520导入外鞘300,从推送分隔盘402与推送杆头部401上孔穿入,勾住瓣膜支架左右勾脚1201,从下孔穿出,形成环形结构;穿出的牵引线700经过外鞘300,绕入左右收线滑轮组820,尾部接入左右收线卷筒810;驱动收线电机830为双头蜗轮蜗杆电机;当驱动收线电机830转动收线时,左右收线卷筒810转动,通过瓣膜支架牵引线700带动左右放线卷筒510,直至将两侧瓣膜支架牵引线700拉紧;
请参看附图7,图7为本发明推送杆头部截面图。所述导头与推送杆俯由导头100,瓣膜支架1200,瓣膜支架勾脚1201,内芯200,瓣膜支架牵引线700,推送杆400,推送分隔盘402,推送杆头部401,外鞘300;推送杆头部侧视图与推送分隔盘侧视图大小形态相似,位置关系如图6;
请参看附图8,图8为本发明控制页面的示意图。所述通过控制页面使得PC端与单片机建立WIFI连接;
本发明的一种基于远程控制的电动支架输送系统的使用操作流程:
本发明提供了一种远端控制的方式,使得使用者可以在远程操控室中实现数据输入与装置控制,完成整个手术过程;手术开始前,使用者将输送系统放置于床旁相应的机械臂上,并调整好机械臂姿态;准备工作完成后,使用者可以退出手术室,进入远程操控室;如图8所示,操作开始时,手术医生启动控制页面,首先点击“连接”按钮,PC端软件与单片机建立Wi-Fi连接;连接成功后,连接状态栏中显示“已连接”字样;若未成功连接则显示“连接失败”,可在等待网络状态恢复后再次点击“链接”直至连接成功;
本发明提供“自动输送”与“手动输送”两种控制方式;使用者可以在控制页面右上角的下拉框中选择控制方式或进行控制方式的切换;控制方式的选择与切换可以在手术开始之前,或术中紧急停止后进行;在手术开始之前,若选择“自动输送”,则输送装置将自动按照输入的数据和指定的程序完成输送过程;若选择“手动输送”,则由使用者通过电机选择按钮和方向控制按键手动控制完成输送过程;
在自动控制过程中,使用者首先需要输入事先测得的患者心脏解剖数据;使用者通过键盘输入提前测得的患者心脏解剖数据并点击“提交”按钮,全部数据将会依次显示在提交预览框中;使用者核对数据,核对无误后点击“确认提交”即可将数据通过Wi-Fi发送到控制装置;若使用者在核对数据时发现数据输入有误,则可以在输入框中重新输入数据并再次点击“提交”按钮,直至核对无误后点击“确认提交”;点击“确认提交”后,若发送成功,则发送状态栏显示“发送成功”字样;否则显示“发送失败”,使用者可以重复点击“确认提交”直至发送成功;
在自动控制模式下,使用者通过“开始运行”、“紧急停止”和“复位”三个按钮控制电机状态;右侧状态显示栏显示输送装置当前的运行状态;当控制装置初始化完毕并成功接收到PC端发送的指令时,状态显示为“就绪”;当电机按照指定的程序开始运行时状态显示为“正在运行”;执行完毕后运行状态为“执行结束”;若执行过程中遇到错误,则运行状态栏显示“错误”字样;
当控制装置通过Wi-Fi模块接收到远程控制页面发送的患者数据后,主控板1410将根据该数据计算出本次释放流程中每个电机各自的运行时间;当使用者点击“开始运行”后;
如图1/2/3/4,首先,整个机械臂带动输送系统到达指定位置(如图9a);之后,电机驱动1440驱动推送杆电机930与内芯推送电机1030同时开始转动,带动推送杆齿轮920与内芯齿轮1020转动,使推送杆400和内芯200向前运动释放瓣膜远心端(如图9b);而后,电机驱动1440控制内芯推送电机1030停止转动,内芯200停止前进,电机驱动1440驱动推送杆电机930转动,推送杆400继续前进,使推送杆头部401抵住瓣膜近心端(如图9c);推送动作完成时,电机驱动1420控制收线电机830开始转动收线,左右收线卷筒810转动,通过瓣膜支架牵引线700带动左右放线卷筒510,直至将两侧瓣膜支架牵引线700拉紧(如图9d);而后,电机驱动1440控制推送杆电机930停止转动,推送杆400停止前进,电机驱动1440驱动内芯推送电机1030转动,内芯200继续前进,释放瓣膜近心端(如图9e);收线动作完成后,电机驱动1430驱动丝杆切线电机610转动,使切线刀座640与刀座导轨产生相对移动,使切线刀头650伸出,切断紧绷于收线滑轮组的瓣膜支架牵引线700(如图9f);切断瓣膜支架牵引线后,切线电机带动刀头回撤;至此释放过程结束;而后电机驱动1440控制推送杆电机930与内芯推送电机1030开始同时反向转动,带动推送杆齿轮920与内芯齿轮1020反向转动,至推送杆400回到初始位置,而后内芯推送电机1030继续反向转动直至内芯200回到初始位置(如图9g);至此全部输送过程结束,所有电机停转,运行状态显示为“执行结束”;
在上述自动执行过程中,“紧急停止”按钮始终有效;当使用者发现手术过程中出现紧急情况时,随时可以通过“紧急停止”按钮控制输送装置急停,此时所有电机立刻停止转动;待问题解决后可以通过“复位”按钮控制输送装置回到起始位置;再次点击“开始运行”即可按照中止前提交的数据运行;在紧急停止后,若需要对输送装置状态做出调整,或选择手动控制输送装置完成剩余过程,则可以进行模式切换,也即从“自动输送”转为“手动输送”;
在手动控制模式下,使用者可以单独控制任意一个电机正传或反转;当切换为手动控制模式后,使用者可以通过鼠标点击选择想要控制的电机,并通过“向前”和“向后”按钮控制其转动;当“向前”或“向后”按钮按下时,电机转动,当按钮松开时,电机停止转动;通过手动控制方式,使用者可以处理手术过程中的特殊情况,也可以直接通过手动控制方式完成整个输送过程。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
- 一种基于远程控制的电动支架输送系统
- 一种基于EtherCAT的液压支架远程控制系统的控制方法