氢燃料电池重卡空压机的控制方法及系统
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及空压机控制领域,尤其涉及一种氢燃料电池重卡空压机的控制方法及系统。
背景技术
空压机的作用是将空气压缩进储气罐存储,并需达到一定的压力;驾驶员行车制动时储气罐中的压力空气被阀体释放,顺着制动管路作用于制动执行器产生制动力矩,使车辆减速或停止;气刹被广泛应用于各种车辆的制动系统,尤其是货车,重卡;此外,被空压机加压的空气也是一些变速箱气动拨叉换挡的驱动来源,压力不足会导致变速箱无法换挡;因此对空压机的控制,关乎行车制动和换挡能否执行。
氢燃料电池重卡同样需要制动和换挡,也就需要压缩机运行保证储气罐的一定压力,而空压机运行需要消耗能量,氢燃料电池重卡与其它气刹制动的车辆区别在于有燃料电池系统和辅助能源系统,也就需要对能量的供给和消耗进行管理,使氢燃料电池重卡可以顺利启动,正常运行;而现有技术中,传统气刹制动车辆的空压机控制方法无法满足氢燃料电池重卡中空压机的控制需求。
上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
发明内容
本发明的主要目的在于,解决现有技术中,传统气刹制动车辆的空压机控制方法无法满足氢燃料电池重卡中空压机的控制需求的技术问题。
为实现上述目的,本发明提供一种氢燃料电池重卡空压机的控制方法,包括步骤:
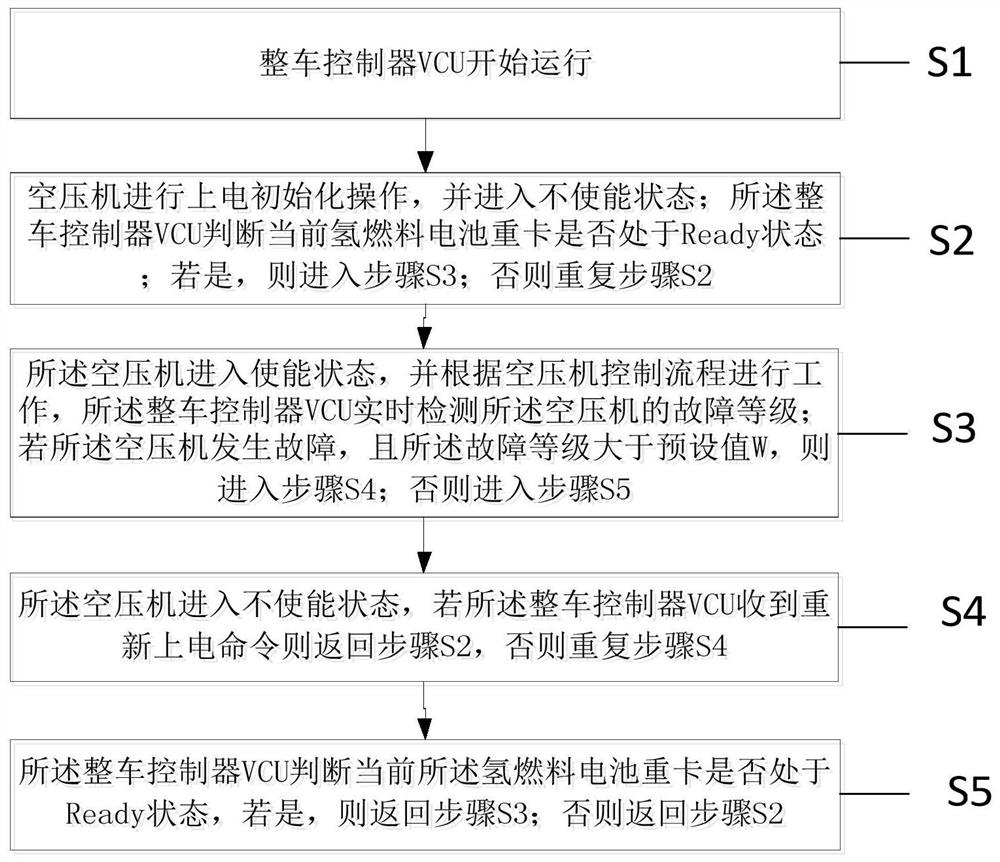
S1:整车控制器VCU开始运行;
S2:空压机进行上电初始化操作,并进入不使能状态;所述整车控制器VCU判断当前氢燃料电池重卡是否处于Ready状态;若是,则进入步骤S3;否则重复步骤S2;
S3:所述空压机进入使能状态,并根据空压机控制流程进行工作,所述整车控制器VCU实时检测所述空压机的故障等级;若所述空压机发生故障,且所述故障等级大于预设值W,则进入步骤S4;否则进入步骤S5;
S4:所述空压机进入不使能状态,若所述整车控制器VCU收到重新上电命令则返回步骤S2,否则重复步骤S4;
S5:所述整车控制器VCU判断当前所述氢燃料电池重卡是否处于Ready状态,若是,则返回步骤S3;否则返回步骤S2。
优选地,步骤S3中,所述根据空压机控制流程进行工作具体为:
S21:所述整车控制器VCU实时检测辅助能源系统最大允许放电功率与氢燃料电池系统净输出功率之和是否小于空压机额定功率P,若是,则所述空压机进入不使能状态,重复步骤S21;否则进入步骤S22;
S22:所述空压机进入使能状态,并开始计时;若所述计时达到预设时间T则进入步骤S23;否则继续计时;
S23:所述整车控制器VCU实时检测前桥气压和后桥气压的值;若所述前桥气压和所述后桥气压均<预设值P1,则进入步骤S24;若所述前桥气压或所述后桥气压≥预设值P2,则进入步骤S25;否则,所述空压机的状态不改变;
S24:所述空压机进入使能状态,返回步骤S23;
S25:所述空压机进入不使能状态,返回步骤S23。
优选地,步骤S24中,所述空压机进入使能状态后,所述前桥气压和所述后桥气压的值均逐渐增加;
步骤S25中,所述空压机进入不使能状态后,所述前桥气压和所述后桥气压的值均不增加或逐渐减小。
优选地,所述空压机进入使能状态后,所述空压机内的旋转元件开始转动;
所述空压机进入不使能状态后,所述空压机内的旋转元件停止转动。
优选地,所述Ready状态具体为:
所述氢燃料电池重卡已完成低压上电和高压上电,并处于可挂挡行驶的状态,整车各控制器均无严重故障;燃料电池系统根据整车控制器VCU的需求进行正常发电。
一种氢燃料电池重卡空压机的控制系统,包括:低压蓄电池、整车控制器VCU、燃料电池系统、动力电池、超级电容、双向DCDC、高压配电箱、驱动电机控制器、驱动电机、空压机控制器、空压机和高压储气瓶;
所述低压蓄电池通过低压线束与所述整车控制器VCU、所述燃料电池系统、所述动力电池、所述超级电容和所述空压机控制器连接;所述超级电容通过低压线束与所述双向DCDC连接;所述高压配电箱通过低压线束与所述驱动电机控制器连接;
所述整车控制器VCU通过CAN总线与所述燃料电池系统、所述动力电池、所述超级电容、所述双向DCDC、所述高压配电箱、所述驱动电机控制器和所述空压机控制器连接;
所述高压配电箱通过高压线束与所述燃料电池系统、所述动力电池、所述双向DCDC、所述驱动电机控制器和所述空压机控制器连接;所述双向DCDC通过高压线束与所述超级电容连接;所述驱动电机控制器通过高压线束与所述驱动电机连接;所述空压机控制器通过高压线束与所述空压机连接;
所述空压机通过管道与所述高压储气瓶连接。
优选地,还包括:燃料电池系统控制器FCS、动力电池管理器BMS、超级电容控制器SCMS、双向DCDC控制器、高压配电箱控制器PDU、驱动电机控制管理器MCU和空压机控制管理器APC;
所述燃料电池系统控制器FCS与所述燃料电池系统电性连接;
所述动力电池管理器BMS与所述动力电池电性连接;
所述超级电容控制器SCMS与所述超级电容电性连接;
所述双向DCDC控制器与所述双向DCDC电性连接;
所述高压配电箱控制器PDU与所述高压配电箱电性连接;
所述驱动电机控制管理器MCU与所述驱动电机控制器电性连接;
所述空压机控制管理器APC与所述空压机控制器电性连接。
优选地,所述整车控制器VCU与所述燃料电池系统控制器FCS、所述动力电池管理器BMS、所述超级电容控制器SCMS、所述双向DCDC控制器、所述高压配电箱控制器PDU、所述驱动电机控制管理器MCU和所述空压机控制管理器APC电性连接。
本发明具有以下有益效果:
通过本发明的氢燃料电池重卡空压机的控制方法,可以合理地控制空压机启停,在保证行车制动和换挡压力空气需求的同时,可以延长空压机的使用寿命,降低整车能耗;在整车放电功率有限的情况下优先将能量分配给燃料电池系统,而禁止空压机启动,有利于氢燃料电池车在极限条件下的启动和系统稳定。
附图说明
图1为本发明氢燃料电池重卡空压机的控制方法流程图;
图2为本发明空压机控制流程的流程图;
图3为本发明氢燃料电池重卡空压机的控制系统结构图;
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
参照图1,本发明提供一种氢燃料电池重卡空压机的控制方法,可以灵活控制氢燃料电池重卡中空压机的状态,使其满足氢燃料电池重卡在启动和行驶中对空压机的工作需求;
包括步骤:
S1:整车控制器VCU开始运行;
S2:空压机进行上电初始化操作,并进入不使能状态;所述整车控制器VCU判断当前氢燃料电池重卡是否处于Ready状态;若是,则进入步骤S3;否则重复步骤S2;
S3:所述空压机进入使能状态,并根据空压机控制流程进行工作,所述整车控制器VCU实时检测所述空压机的故障等级;若所述空压机发生故障,且所述故障等级大于预设值W,则进入步骤S4;否则进入步骤S5;具体实现中,空压机的故障等级为1到4级,优选地,预设值W设置为1;
S4:所述空压机进入不使能状态,若所述整车控制器VCU收到重新上电命令则返回步骤S2,否则重复步骤S4;
S5:所述整车控制器VCU判断当前所述氢燃料电池重卡是否处于Ready状态,若是,则返回步骤S3;否则返回步骤S2。
参考图2,本实施例中,步骤S3中,所述根据空压机控制流程进行工作具体为:
S21:所述整车控制器VCU实时检测辅助能源系统最大允许放电功率与氢燃料电池系统净输出功率之和是否小于空压机额定功率P,若是,则所述空压机进入不使能状态,重复步骤S21;否则进入步骤S22;
具体实现中,空压机额定功率P的值设置为5Kw;当出现辅助能源系统最大允许放电功率+氢燃料电池系统净输出功率<空压机额定功率P时,一般是由于氢燃料电池系统还没有启动发电,或辅助能源系统因温度低或剩余容量较低,从而限制了最大允许放电功率,此时应优先保证氢燃料电池系统起堆时的功率需求,等待氢燃料电池系统有一定功率输出后再使能空压机;
S22:所述空压机进入使能状态,并开始计时;若所述计时达到预设时间T则进入步骤S23;否则继续计时;优选地,预设时间T设置为60s;
S23:所述整车控制器VCU实时检测前桥气压和后桥气压的值;若所述前桥气压和所述后桥气压均<预设值P
S24:所述空压机进入使能状态,返回步骤S23;
S25:所述空压机进入不使能状态,返回步骤S23;
具体实现中,当前桥气压和后桥气压均<预设值P
本实施例中,步骤S24中,所述空压机进入使能状态后,所述前桥气压和所述后桥气压的值均逐渐增加;
步骤S25中,所述空压机进入不使能状态后,所述前桥气压和所述后桥气压的值均不增加或逐渐减小;具体实现中,当驾驶员没有踩刹车时,前桥气压和后桥气压的值基本不变;当驾驶员踩刹车时会消耗掉一些气,此时前桥气压和后桥气压的值会逐渐减小;
所述空压机进入使能状态后,所述空压机内的旋转元件开始转动;
所述空压机进入不使能状态后,所述空压机内的旋转元件停止转动。
本实施例中,所述Ready状态具体为:
所述氢燃料电池重卡已完成低压上电和高压上电,并处于可挂挡行驶的状态,整车各控制器均无严重故障;燃料电池系统根据整车控制器VCU的需求进行正常发电;
具体实现中,当氢燃料电池重卡没有达到Ready状态时,空压机控制器输入端没有高压供给,此时即使整车控制器VCU向空压机发送使能信号,空压机也无法运行;
氢燃料电池重卡第一次上电后会强制向高压储气瓶打气一段时间Time1,其好处如下:①持续打气一段时间使空压机温度升高,温度升高使油水分离,可以减小或避免空压机润滑油乳化问题;②相当于自检,第一次上电运行一段时间没有故障,说明空压机状态良好;③强制打气无需判断压力值,当压力传感器故障时,车辆第一次上电仍会打气,使储气罐有一定压力,这样驻车制动不会抱死,档位拨叉也可以进行切换,方便故障拖车或有限范围挪车。由于储气罐有机械的泄压阀,当压力达到会自动泄压,不用担心压力一直升高;Time1的取值原则为:不低于空罐打满所需要的时间。
参考图3,本发明提供一种氢燃料电池重卡空压机的控制系统,用于实现上述氢燃料电池重卡空压机的控制方法;
具体包括:低压蓄电池、整车控制器VCU、燃料电池系统、动力电池、超级电容、双向DCDC、高压配电箱、驱动电机控制器、驱动电机、空压机控制器、空压机和高压储气瓶;
所述低压蓄电池通过低压线束与所述整车控制器VCU、所述燃料电池系统、所述动力电池、所述超级电容和所述空压机控制器连接;所述超级电容通过低压线束与所述双向DCDC连接;所述高压配电箱通过低压线束与所述驱动电机控制器连接;
所述整车控制器VCU通过CAN总线与所述燃料电池系统、所述动力电池、所述超级电容、所述双向DCDC、所述高压配电箱、所述驱动电机控制器和所述空压机控制器连接;
所述高压配电箱通过高压线束与所述燃料电池系统、所述动力电池、所述双向DCDC、所述驱动电机控制器和所述空压机控制器连接;所述双向DCDC通过高压线束与所述超级电容连接;所述驱动电机控制器通过高压线束与所述驱动电机连接;所述空压机控制器通过高压线束与所述空压机连接;
所述空压机通过管道与所述高压储气瓶连接。
本实施例中,所述氢燃料电池重卡空压机的控制系统还包括:燃料电池系统控制器FCS、动力电池管理器BMS、超级电容控制器SCMS、双向DCDC控制器、高压配电箱控制器PDU、驱动电机控制管理器MCU和空压机控制管理器APC;
所述燃料电池系统控制器FCS与所述燃料电池系统电性连接,用于控制燃料电池系统;
所述动力电池管理器BMS与所述动力电池电性连接,用于控制动力电池;
所述超级电容控制器SCMS与所述超级电容电性连接,用于控制超级电容;
所述双向DCDC控制器与所述双向DCDC电性连接,用于控制双向DCDC;
所述高压配电箱控制器PDU与所述高压配电箱电性连接,用于控制高压配电箱;
所述驱动电机控制管理器MCU与所述驱动电机控制器电性连接,用于控制驱动电机控制器;
所述空压机控制管理器APC与所述空压机控制器电性连接,用于控制空压机控制器。
本实施例中,所述整车控制器VCU与所述燃料电池系统控制器FCS、所述动力电池管理器BMS、所述超级电容控制器SCMS、所述双向DCDC控制器、所述高压配电箱控制器PDU、所述驱动电机控制管理器MCU和所述空压机控制管理器APC电性连接。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 氢燃料电池重卡空压机的控制方法及系统
- 氢燃料电池系统空压机控制系统、方法及存储介质