一种圆柱电池抓取变位机械手装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及一种圆柱电池抓取变位机械手装置。
背景技术
在圆柱电池的生产过程中,电池会进入不同的输送工具中,这些工具有输送线,料框,机构等。由于圆柱电池的生产节拍非常的高,目前行业中是200PPM,因此在工具间搬运的机械手都是同时抓取一排电池,一般是16只。而这些工具之间的电池间距有的就不一样,为了实现这些工具的正常运转,生产电池,因而就有了电池抓取变距机械手,来对接有不同的电池间距的工具及机构。现有的变距机械手,夹爪采用了导杆导套引导,夹爪间采用可调连接块连接,一端夹爪固定,另一端夹爪在气缸的带动下,可沿导向轴方向移动,从而拉动夹爪实现变距,但是这种变距机械手运动过程中行程长,所需驱动力大,抓取时间长,整个设备的能源消耗大。
发明内容
为了解决上述问题,本发明提出了一种运动行程短、所需驱动力小、节约能源的圆柱电池抓取变位机械手装置。
本发明所述的一种圆柱电池抓取变位机械手装置,其特征在于,包括:
升降机构,包括升降驱动装置和升降连接装置,所述升降驱动装置与外置的水平模组的驱动部相连,并且所述升降驱动装置的升降端与所述升降连接装置的固定部相连,所述升降驱动装置的升降部与所述变距机构相连,用于驱动变距机构沿竖直方向升降;
变矩机构,设置于所述升降连接装置的下方,包括支撑架体、水平驱动装置和供气装置,所述支撑架体水平设置于所述升降连接装置的正下方,并且所述支撑架体的中部与所述升降驱动装置的升降端相连;所述水平驱动装置共两套,分别设置于所述支撑架体的两端部,并保持所述水平驱动装置的伸缩端正对,用于控制夹爪机构的间距;两套所述水平驱动装置之间设置变距导向轴,用于安装所述夹爪机构;所述供气装置安装于所述支撑架体上,并且所述供气装置的控制端配装可与外部气源连通的电磁阀,用于控制夹爪机构的夹紧或松开;
以及夹爪机构,设置于所述变距导向轴上,包括固定爪组件和移动爪组件,所述固定爪组件包括固定爪安装部和固定爪,所述固定爪安装部的顶部固设于所述变距导向轴的中部,用于安装所述固定爪;所述固定爪悬装于所述固定爪安装部的底部,并且所述固定爪的第一气管接头与所述供气装置的固定爪气管连接头管路连通;所述移动爪组件分成两组,分列于所述固定爪组件两侧,每套所述移动爪组件包括移动爪固定部和移动爪,所述移动爪固定部可滑动地套设于所述变距导向轴上,并且相邻两所述移动爪固定部之间通过连接片相互连接;所述移动爪悬装于所述移动爪安装部的底部,所述移动爪的第二气管接头与所述供气装置的移动爪气管连接头管路连通。
进一步,所述升降连接装置包括第一水平支撑板、拖链、第一拖链连接板以及第一直线轴承,所述第一水平支撑板的两端部各安装一第一拖链连接板,所述第一水平支撑板沿长度方向设有加强筋,两端部各设有一通孔;所述拖链共两条,分别设置于所述第一水平支撑板的两端部,所述拖链的上端与所述第一拖链连接板相连,所述拖链的下端与所述支撑架体的端部相连;所述第一直线轴承安装于所述第一水平支撑板的端部的通孔处,用于与所述支撑架体滑动配合。
进一步,所述支撑架体包括第二水平支撑板、第三水平支撑板、第二拖链连接板、连接条、升降导向轴、端部支撑柱、中部支撑柱,所述第二水平支撑板通过端部支撑柱水平架设于所述第三水平支撑板的上方,二者之间留有用于容纳水平驱动装置的驱动安装区;所述升降导向轴分为两组,分别竖直固装于所述第二水平支撑板的两端部,所述升降导向轴穿设于所述第一水平支撑板对应的第一直线轴承中,并且每组所述升降导向轴的上端贯穿所述通孔后通过连接条连接在一起,用于防止所述升降导向轴从通孔中脱出;所述中部支撑柱设置于所述第二水平支撑板和所述第三水平支撑板的中间位置,所述中部支撑柱的上端与所述第二水平支撑板固连,下端与所述固定爪安装部固连;所述第二水平支撑板的顶部安装供气装置;所述第二拖链连接板安装于所述第三水平支撑板的侧面,用于固定拖链。
进一步,所述支撑架体还包括过压保护缓冲机构,所述过压保护缓冲机构包括位置检测传感器以及传感器支架,所述传感器支架安装于所述第三水平支撑板的底部,所述位置检测传感器安装于所述传感器支架上。
进一步,所述水平驱动装置包括水平驱动气缸、连接杆、油压缓冲头和气缸支架,两套所述气缸支架正对,分别固设于所述第三水平支撑板的两端部,并且所述气缸支架之间设置变距导向轴和连接杆,所述变距导向轴和连接杆均沿所述第二水平支撑杆和第三水平支撑杆的长度方向布置,其中所述变距导向轴的两端与所述气缸支架固连,所述连接杆的端部通过油压缓冲头与所述气缸支架连接;所述水平驱动气缸通过气缸支架安装于所述第三水平支撑板的端部,两套所述水平驱动气缸的伸缩端配装第一浮动接头,并且两第一浮动接头对准套设于所述变距导向轴上的移动爪,用于调节所述移动爪之间的轴向间距。
进一步,所述供气装置包括集成气管接头、第二浮动接头、电磁阀安装板和电磁阀,所述集成气管接头和所述电磁阀安装板均固装于所述第二水平支撑板的表面,所述集成气管接头顶部配装第二浮动接头;所述电磁阀安装于所述电磁阀固定板上,并且所述集成气管接头的总进气口通过所述电磁阀与外部气源相连通,所述集成气管接头的分出气口分别与所述固定爪的第一气管接头以及所述移动爪的第二气管接头管路连通,用于控制所述固定爪和移动爪的抓紧或松开。
进一步,所述固定爪安装部包括固定座、第二直线轴承、第一缓冲导向轴、第一限位块、固定夹爪安装板以及第一检测片,所述固定座固定套装于所述连接杆和所述变距导向轴的中部,并且所述固定座的顶部与所述中部固定轴的底部固连;所述第一缓冲导向轴设置于所述固定座和所述固定夹爪安装板之间,所述第一缓冲导向轴的顶端与所述固定座的底部固连,所述第一缓冲导向轴的下端与所述第二直线轴承滑动配合,所述第一缓冲导向轴的外部套设第一弹簧;所述第二直线轴承固装于所述固定夹爪安装板的顶部;所述第一检测片安装于所述固定夹爪安装板上,用于检测所述固定爪的状态;所述第一限位块设置于所述固定夹爪安装板的端部。
进一步,所述固定爪包括固定夹爪气缸、第一夹持手指、第一摩擦条和第一气管接头,所述固定夹爪气缸悬装于所述固定夹爪安装板的底部,所述固定夹爪气缸的夹紧端安装一对第一夹持手指,所述固定夹爪气缸的进气口配装第一气管接头,用于与所述集成气管接头的分出气口相连通,用于控制第一夹持手指之间间距以夹紧或放松电池;所述第一摩擦条铺装于所述第一夹持手指相对的夹持端面上。
进一步,所述移动爪安装部包括滑动座、第三直线轴承、第二缓冲导向轴、第二限位块、移动夹爪安装板以及第二检测片,所述滑动座可滑动地套装于所述连接杆和所述变距导向轴的中部,相邻所述滑动座、相邻的滑动座与固定座之间通过连接片相互连接,用于实现所述滑动座与固定座之间的联动;所述第二缓冲导向轴设置于所述滑动座和所述移动夹爪安装板之间,所述第二缓冲导向轴的顶端与所述滑动座的底部固连,所述第二缓冲导向轴的下端与所述第三直线轴承滑动配合,所述第二缓冲导向轴的外部套设第二弹簧;所述第三直线轴承固装于所述移动夹爪安装板的顶部;所述第二检测片安装于所述移动夹爪安装板上,用于检测所述移动爪的状态;所述第二限位块设置于所述移动夹爪安装板的端部。
进一步,所述移动爪包括移动夹爪气缸、第二夹持手指、第二摩擦条和第一气管接头,所述移动夹爪气缸悬装于所述移动夹爪安装板的底部,所述移动夹爪气缸的夹紧端安装一对第二夹持手指,所述移动夹爪气缸的进气口配装第二气管接头,用于与所述集成气管接头的分出气口相连通,用于控制第二夹持手指之间间距以夹紧或放松电池;所述第二摩擦条铺装于所述第二夹持手指相对的夹持端面上。
本发明的有益效果是:
(1)中间夹爪是固定的,2边夹爪向2边可以移动;使得每边只有一半的运动夹爪,相对于单边运动,行程减少了一半,所需驱动力也减少了;
(2)移动夹爪带有直线轴承,减小了摩擦阻力;
(3)夹爪带有过压保护缓冲机构,可以检测到下降过程中的碰撞;
(4)夹爪手指内侧嵌有防滑用的摩擦条,可以防止电池掉落。
附图说明
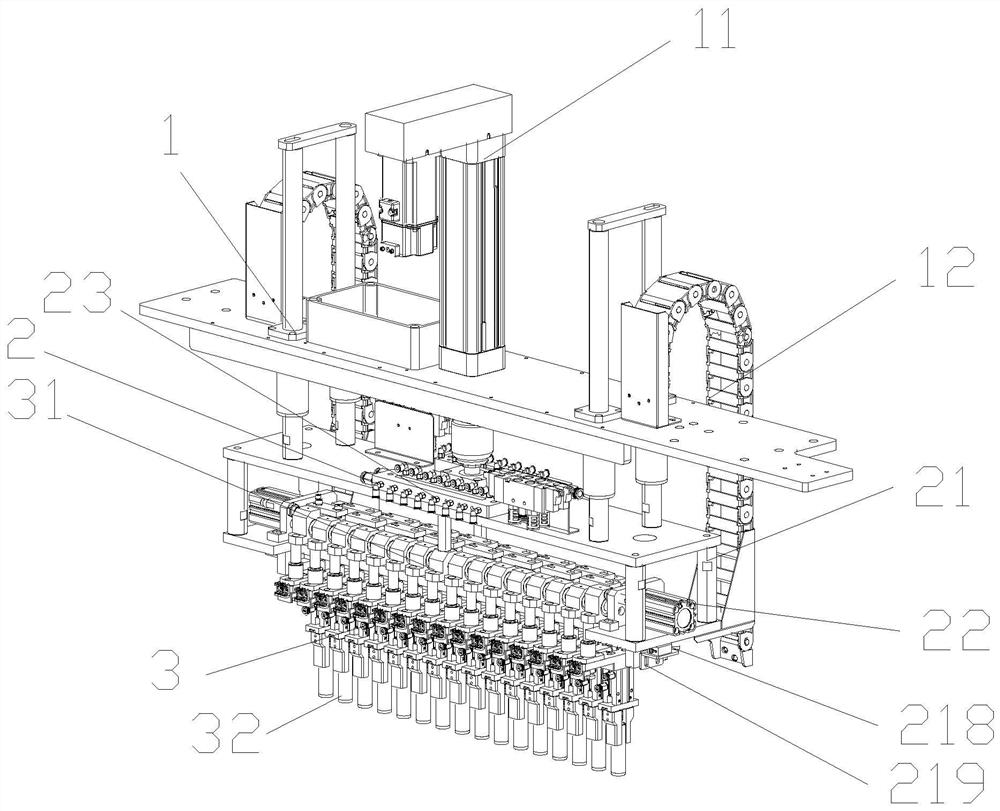
图1是本发明的结构图之一。
图2a是本发明的结构图之二。
图2b是本发明的结构图之三。
图3是本发明的升降机构结构图。
图4是本发明的变距机构结构图。
图5a是本发明的固定夹爪组件结构图之一。
图5b是本发明的固定夹爪组件结构图之二。
图6a是本发明的移动夹爪组件结构图之一。
图6b是本发明的移动夹爪组件结构图之二。
具体实施方式
下面结合附图进一步说明本发明。
参照附图:
实施例1本发明所述的一种圆柱电池抓取变位机械手装置,包括:
升降机构1,包括升降驱动装置11和升降连接装置12,所述升降驱动装置11与外置的水平模组的驱动部相连,并且所述升降驱动装置11的升降端与所述升降连接装置12的固定部相连,所述升降驱动装置11的升降部与所述变距机构2相连,用于驱动变距机构沿竖直方向升降;
变矩机构2,设置于所述升降连接装置12的下方,包括支撑架体21、水平驱动装置22和供气装置23,所述支撑架体21水平设置于所述升降连接装置11的正下方,并且所述支撑架体21的中部与所述升降驱动装置11的升降端相连;所述水平驱动装置22共两套,分别设置于所述支撑架体21的两端部,并保持所述水平驱动装置22的伸缩端正对,用于控制夹爪机构的间距;两套所述水平驱动装置之间设置变距导向轴24,用于安装所述夹爪机构3;所述供气装置23安装于所述支撑架体21上,并且所述供气装置23的控制端配装可与外部气源连通的电磁阀,用于控制夹爪机构的夹紧或松开;
以及夹爪机构3,设置于所述变距导向轴上,包括固定爪组件31和移动爪组件32,所述固定爪组件31包括固定爪安装部311和固定爪312,所述固定爪安装部311的顶部固设于所述变距导向轴的中部,用于安装所述固定爪;所述固定爪312悬装于所述固定爪安装部311的底部,并且所述固定爪312的第一气管接头与所述供气装置23的固定爪气管连接头管路连通;所述移动爪组件32分成两组,分列于所述固定爪组件31两侧,每套所述移动爪组件32包括移动爪固定部321和移动爪322,所述移动爪固定部321可滑动地套设于所述变距导向轴上,并且相邻两所述移动爪固定部321之间、相邻所述移动爪固定部与固定爪安装部31之间通过连接片33相互连接;所述移动爪322悬装于所述移动爪安装部321的底部,所述移动爪322的第二气管接头与所述供气装置23的移动爪气管连接头管路连通。
所述升降连接装置12包括第一水平支撑板121、拖链122、第一拖链连接板123以及第一直线轴承124,所述第一水平支撑板121的两端部各安装一第一拖链连接板123,所述第一水平支撑板121沿长度方向设有加强筋125,两端部均设有通孔;所述拖链122共两条,分别设置于所述第一水平支撑板121的两端部,所述拖链122的上端与所述第一拖链连接板123相连,所述拖链122的下端与所述支撑架体21的端部相连;所述第一直线轴承124安装于所述第一水平支撑板121的端部的通孔正下方,用于与所述支撑架体21滑动配合。
所述第一水平支撑板121上配装接线盒1211。
所述支撑架体21包括第二水平支撑板211、第三水平支撑板212、第二拖链连接板213、连接条214、升降导向轴215、端部支撑柱216和中部支撑柱217,所述第二水平支撑板211通过端部支撑柱216水平架设于所述第三水平支撑板212的上方,二者之间留有用于容纳水平驱动装置的驱动安装区;所述升降导向轴215分为两组,分别竖直固装于所述第二水平支撑板211的两端部,所述升降导向轴215穿设于所述第一水平支撑板121对应的第一直线轴承124中,并且每组所述升降导向轴215的上端贯穿所述通孔后通过连接条214连接在一起,用于防止所述升降导向轴从通孔中脱出;所述中部支撑柱217设置于所述第二水平支撑板211和所述第三水平支撑板212的中间位置,所述中部支撑柱217的上端与所述第二水平支撑板211固连,下端与所述固定爪安装部311固连;所述第二水平支撑板211的顶部安装供气装置23;所述第二拖链连接板213安装于所述第三水平支撑板212的侧面,用于固定拖链。
所述支撑架体21还包括过压保护缓冲机构,所述过压保护缓冲机构包括位置检测传感器218以及传感器支架219,所述传感器支架219安装于所述第三水平支撑板212的底部,所述位置检测传感器218安装于所述传感器支架219上。
所述水平驱动装置22包括水平驱动气缸221、连接杆222、油压缓冲头223和气缸支架224,两套所述气缸支架224正对,分别固设于所述第三水平支撑板212的两端部,并且所述气缸支架224之间设置变距导向轴215和连接杆222,所述变距导向轴215和连接杆222均沿所述第二水平支撑杆211和第三水平支撑杆212的长度方向布置,其中所述变距导向轴215的两端与所述气缸支架224固连,所述连接杆222的端部通过油压缓冲头223与所述气缸支架224连接;所述水平驱动气缸221通过气缸支架224安装于所述第三水平支撑板212的端部,两套所述水平驱动气缸221的伸缩端配装第一浮动接头,并且两第一浮动接头对准套设于所述变距导向轴215上的移动爪,用于调节所述移动爪之间的轴向间距。
所述供气装置23包括集成气管接头231、第二浮动接头232、电磁阀安装板233和电磁阀234,所述集成气管接头231和所述电磁阀安装板233均固装于所述第二水平支撑板211的表面,所述集成气管接头231顶部配装第二浮动接头232;所述电磁阀234安装于所述电磁阀固定板233上,并且所述集成气管接头231的总进气口通过所述电磁阀234与外部气源相连通,所述集成气管接头231的分出气口分别与所述固定爪312的第一气管接头以及所述移动爪322的第二气管接头管路连通,用于控制所述固定爪和移动爪的抓紧或松开。
所述固定爪安装部311包括固定座3111、第二直线轴承3112、第一缓冲导向轴3113、第一限位块3114、固定夹爪安装板3115以及第一检测片3116,所述固定座3111固定套装于所述连接杆222和所述变距导向轴24的中部,并且所述固定座3111的顶部与所述中部固定轴217的底部固连;所述第一缓冲导向轴3113设置于所述固定座和所述固定夹爪安装板3115之间,所述第一缓冲导向轴3113的顶端与所述固定座3111的底部固连,所述第一缓冲导向轴3113的下端与所述第二直线轴承3112滑动配合,所述第一缓冲导向轴3113的外部套设第一弹簧3117;所述第二直线轴承3112固装于所述固定夹爪安装板3115的顶部;所述第一检测片3116安装于所述固定夹爪安装板3115上,用于检测所述固定爪312的状态;所述第一限位块3114设置于所述固定夹爪安装板3115的端部。
所述固定爪312包括固定夹爪气缸3121、第一夹持手指3122、第一摩擦条3123和第一气管接头3124,所述固定夹爪气缸3121悬装于所述固定夹爪安装板3115的底部,所述固定夹爪气缸3121的夹紧端安装一对第一夹持手指3122,所述固定夹爪气缸3121的进气口配装第一气管接头3124,用于与所述集成气管接头231的分出气口相连通,用于控制第一夹持手指3122之间间距以夹紧或放松电池;所述第一摩擦条3123铺装于所述第一夹持手指3122相对的夹持端面上。
所述移动爪安装部321包括滑动座3211、第三直线轴承3212、第二缓冲导向轴3213、第二限位块3214、移动夹爪安装板3215以及第二检测片3216,所述滑动座3211可滑动地套装于所述连接杆222和所述变距导向轴24的中部,相邻所述滑动座3211、相邻的滑动座3211与固定座3111之间通过连接片33相互连接,用于实现所述滑动座3211与固定座3111之间的联动;所述第二缓冲导向轴3213设置于所述滑动座3211和所述移动夹爪安装板3215之间,所述第二缓冲导向轴3213的顶端与所述滑动座3211的底部固连,所述第二缓冲导向轴3213的下端与所述第三直线轴承3212滑动配合,所述第二缓冲导向轴3213的外部套设第二弹簧3217;所述第三直线轴承3212固装于所述移动夹爪安装板3215的顶部;所述第二检测片3216安装于所述移动夹爪安装板3215上,用于检测所述移动爪322的状态;所述第二限位块3214设置于所述移动夹爪安装板3215的端部。
所述移动爪322包括移动夹爪气缸3221、第二夹持手指3222、第二摩擦条3223和第二气管接头3224,所述移动夹爪气缸3221悬装于所述移动夹爪安装板3215的底部,所述移动夹爪气缸3221的夹紧端安装一对第二夹持手指3222,所述移动夹爪气缸3221的进气口配装第二气管接头3224,用于与所述集成气管接头231的分出气口相连通,用于控制第二夹持手指3222之间间距以夹紧或放松电池;所述第二摩擦条3223铺装于所述第二夹持手指3222相对的夹持端面上。
该装置主要工作流程为:变位机械手由水平模组驱动运动到小间距电池托盘上方,变距机构在两边的水平驱动气缸的推动下,移动夹爪组件向固定夹爪组件靠拢,移动夹爪气缸和固定夹爪气缸上气,移动夹爪和固定夹爪打开;升降驱动装置向下推出,升降机构带动夹爪机构下降,当夹爪机构降到电池顶面下方30mm时,升降驱动装置停止,移动夹爪气缸和固定夹爪气缸闭合,夹柱电池。然后升降驱动装置拉起升降机构,使电池完全脱离托盘。变位机械手由水平模组驱动运动到大间距电池托盘上方,变距机构在两边的水平驱动气缸的拉动下,移动夹爪组件远离固定夹爪组件,移动夹爪组件远离固定夹爪间距拉开,升降驱动装置推出,升降机构下降,直到电池进入大间距托盘的槽中一定距离时,升降驱动装置停止,移动夹爪和固定夹爪打开,电池落下。升降驱动装置拉起升降机构,到上方预订位置后,停止。
本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也包括本领域技术人员根据本发明构思所能够想到的等同技术手段。
- 一种圆柱电池抓取变位机械手装置
- 一种圆柱形动力电池单体抓取机械手