一种粮库仓窗控制启关结构
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及粮库仓窗控制领域,具体涉及一种粮库仓窗自动控制系统及自动手动控制切换结构。
背景技术
近年来,粮库设备智能控制系统已经得到了广泛的应用,该系统既节省了人力的使用,同时提高了效率以及控制的准确性。
但在粮库仓窗的智能控制方面,常规的电动开窗方式并不适用于粮库仓窗的使用。粮库的仓窗不仅起到常规窗户的通风、降温、防雨学等恶劣天气的功能,且在对粮库进行粮食的进出库过程中,高处的仓窗需要放置输粮机构,因此仓窗附近不宜有其他结构。
同时在现有的自动控制机构中,大多只保留了电动控制的功能,在供电以及动力机构功能。结构等出现问题时,无法在故障期间进行开关窗操作,仓窗的正常启关存在一定的风险。
因此,本发明将自动控制机构移动到非仓窗周围的较低区域,不仅不影响仓窗处的粮食进出,而且自动控制机构也方便进行调试与维修。同时保留了手动控制机构,确保在自动控制机构出现问题时能及时快速的手动开启和关闭仓窗。
发明内容
本发明提供了一种粮库仓窗智能控制系统及自动手动控制切换结构,将自动控制仓窗启关与手动控制相结合,解决了在自动控制系统出现故障时,无法及时对仓窗进行关闭的技术问题。
通过以下技术方案来实现本发明的目的:
提出一种粮库仓窗控制启关结构,包括窗体连接机构、自动控制机构、手动控制机构、窗体。其中窗体连接机构与自动控制机构通过齿轮齿条的传动进行连接,窗体连接机构与手动控制机构通过内齿轮传动进行连接,自动控制机构与手动控制机构通过滑动进行连接。
优选地,所述的窗体连接机构包括窗体连杆,旋转连杆,连杆固定架,齿轮,所述的窗体连杆固定于窗体上,所述的旋转连杆的横杆部分与窗体连杆旋转连接,旋转连杆的竖杆部分固定于旋转支架,可正反旋转;旋转连杆的竖杆部分与齿轮固定连接。
优选地,所述的自动控制机构包括固定座、电动推杆、齿条、水平导轨,所述的电动推杆与固定座通过销连接,可竖直移动,电动推杆与齿条固定连接,可水平伸出和缩回,所述的齿条与齿轮啮合连接,竖直导轨固定于箱体上,所述的水平导轨与齿条固定连接,水平导轨可竖直运动。
优选地,所述的手动控制机构包括手动推杆、箱体、竖直导轨,箱体与仓库墙体固定连接,所述的竖直导轨固定在箱体上,与水平导轨通过螺钉固定连接,手动推杆与旋转连杆转动连接,手动推杆可以旋转和竖直运动。
与现有控制系统结构相比,该结构具有如下优点:
将自动控制机构移动到非仓窗周围的较低区域,不仅不影响仓窗处的粮食进出,而且自动控制机构也方便进行调试与维修。使用市面上使用广泛、技术成熟的电动推杆作为动力源,运转精准且方便系统控制。同时保留了手动控制机构,确保在自动控制机构出现问题时能及时快速的手动开启和关闭仓窗。
附图说明
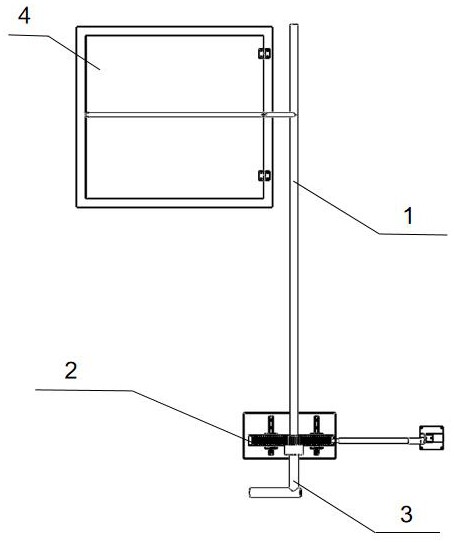
图1为本发明的仓窗启关系统整体结构示意图,其包括1窗体连接机构、2自动控制机构、3手动控制机构、4窗体。
图2为本发明的仓窗控制系统窗体连接结构图,其包括2-1固定座、2-2电动推杆、2-3齿条、2-4水平导轨。
图3为本发明的自动控制和手动控制结构示意图,其包括包括3-1箱体、3-2竖直导轨、3-3手动推杆。
具体实施方式
为了准确说明本发明实施例中的技术方案,结合本发明中实施例中的附图作出进一步的说明。在下文的描述中,给出了具体的细节能够便对本发明有更为彻底的理解。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。在本发明的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“竖直”、“水平”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1所示,仓窗控制系统的整体结构,包括1窗体连接机构、2自动控制机构、3手动控制机构、4窗体,其中窗体连接机构与自动控制机构通过齿轮齿条的传动进行连接,窗体连接机构与手动控制机构通过内齿轮传动进行连接。
所述的1窗体连接机构包括1-1窗体连杆、1-2旋转连杆、1-3连杆固定架、1-4齿轮。1-1窗体连杆与4窗体转动连接,1-2旋转连杆的横杆部分与1-1窗体连杆转动连接,1-2旋转连杆的竖杆部分固定于1-3转动支架,可正反旋转,1-2旋转连杆的竖杆部分与1-4齿轮固定连接。
所述的2自动控制机构包括2-1固定座、2-2电动推杆、2-3齿条、2-4水平导轨,2-2电动推杆与2-1固定座通过销连接,可竖直移动;2-2电动推杆与2-3齿条固定连接,可水平伸出和缩回;2-3齿条与1-4齿轮啮合传动,2-3齿条的水平移动可带动1-4齿轮旋转运动。竖直导轨固定于箱体上,水平导轨与齿条固定连接,水平导轨与竖直导轨固定连接,水平导轨可竖直运动。
所述的3手动控制机构包括3-1箱体、3-2竖直导轨、3-3手动推杆,3-1箱体固定于粮仓墙面,3-2竖直导轨固定3-1箱体上,与2-4水平导轨通过螺钉固定连接。3-3手动推杆与1-2旋转连杆转动连接,手动推杆可以旋转和竖直运动。
参照所有附图,一种非开挖地下穿孔工作机器人工作过程是:
如图2所示,在收到关窗信号时,2-2电动推杆的杆体伸出,带动2-3齿条在2-4水平导轨上相对水平向左移动,1-4齿轮在啮合传动的作用下逆时针转动,带动1-2旋转连杆,1-1窗体连杆逆时针转动,从而打开4窗体,实现自动开窗动作。
如图2所示,在收到关窗信号时,2-2电动推杆的杆体缩回,带动2-3齿条在2-4水平导轨上相对水平向右移动,1-4齿轮在啮合传动的作用下顺时针转动,带动1-2旋转连杆,1-1窗体连杆顺时针转动,从而关闭4窗体,实现自动关窗动作。
如图3所示,当2自动控制机构出现故障时,将3-3手动推杆竖直向上移动,3-3手动推杆内齿轮部分与1-4齿轮相啮合,同时内齿轮上表面推动2-3齿条、2-4水平导轨在3-2竖直导轨上竖直向上移动,使1-4齿轮与2-3齿条脱离啮合,此时如进行开窗动作,用手握住3-3手动推杆的横杆部分拉动其做逆时针旋转,在内齿轮啮合的作用下,1-4齿轮逆时针转动,带动1-2旋转连杆,1-1窗体连杆逆时针转动,从而打开4窗体,实现手动开窗动作。
此时如进行关窗动作,用手握住3-3手动推杆的横杆部分推动其做顺时针旋转,在内齿轮啮合的作用下,1-4齿轮顺时针转动,带动1-2旋转连杆,1-1窗体连杆逆时针转动,从而打开4窗体,实现手动开窗动作。
以上所述为本发明具体实施方式,并非限制本方案的保护范围。任何熟悉本研究领域的技术人员在不脱离本方案的范围情况下,对以上实施例所做的修改等同替换及修饰,均在本方案的技术保护范围内。