一种适用于长直焊缝的数字射线检测装置及检测方法
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及船舶焊缝检测技术领域,尤其涉及一种适用于长直焊缝的数字射线检测装置及检测方法。
背景技术
在船舶、海工、钢结构建造等领域中存在着大量的焊缝结构,这些焊缝的质量对人民生命和财产安全影响巨大,采用射线检测技术以其可直观显示检测结果,检测可靠性高等特点,被广泛应用于各个行业的无损检测中。
传统胶片X射线检测法存在人工环节多,检测效率低,检测结果难以有效保存,过程对环境有一定污染等突出问题。
发明内容
本发明的目的是提供一种适用于长直焊缝的数字射线检测装置及检测方法。
为了实现上述目的,本发明的技术方案是:
一种适用于长直焊缝的数字射线检测装置,其特征在于,包括射线机、电控系统、机械传动系统、无线传输系统、视觉识别系统和安全防护系统,所述机械传动系统包括射线源移动车和探测器运载车,所述射线机设置于射线源移动车上,所述射线源移动车由上位机无线控制沿导轨移动;
所述探测器运载车上设有辐射探测器,所述电控系统和视觉识别系统均设置于探测器运载车上;
所述电控系统包括微型计算机、可编程控制器和无线中继器,所述电控系统通过路由中继由上位机无线控制采集;
所述安全防护系统包括辐射安全防护系统和设备安全防护系统,所述辐射安全防护包括屏蔽铅房和光栅,所述上位机位于屏蔽铅房内,所述光栅设置于射线机的窗口处,
所述设备安全防护系统包括光电传感器,所述光电传感器设置于探测器运载车两侧前轮、后轮的边缘。
进一步地,所述设备安全防护系统包括无线摄像头,所述无线摄像头安装在射线源移动车和探测器运载车上。
进一步地,所述上位机包括总控制台,所述总控制台设有电源急停按钮和射线急停按钮,所述电源急停按钮切断或开启本检测装置的总电源,所述射线急停按钮切断或开启射线机的电源。
进一步地,所述射线源移动车和探测器运载车设有紧急停车按钮,所述紧急停车按钮可切断射线源移动车和探测器运载车的供电。
一种适用于长直焊缝的数字射线检测方法,其特征在于,包括以下步骤:
步骤S1、辐射探测器在检测之前进行亮场及暗场校正;
步骤S2、将探测器运载车置于焊缝起点,系统自检,准备开始检测;
步骤S3、探测器运载车车轮上的光电传感器寻找钢板近端边缘以及焊缝起点,计算机设立检测坐标系;
步骤S4、上位机控制射线源移动车运动到起点位置,根据被检工件厚度,按照工艺要求设定曝光参数,上位机将参数信号发至射线机,射线机开启射线;
步骤S5、辐射探测器向边缘伸出,检测焊缝端点,曝光完成后,探测器收回,准备检测焊缝主体;
步骤S6、探测器运载车与射线源移动车根据检测工艺中一次透照长度,向前行走相应距离,探测器运载车通过视觉识别系统保持跟随焊缝做直线行走运动,到位后发送信号至上位机;
步骤S7、射线源移动车沿轨道行走,到位后发送信号至上位机;
步骤S8、上位机接收到探测器运载车与射线源移动车到位信号后,发送信号至探测器运载车上的电控系统,电控系统控制辐射探测器接收射线曝光采集图像;
步骤S9、采集完成后,辐射探测器将采集到的图像原始数据发送至探测器运载车上的微型计算机,临时储存,微型计算机通过无线网络将数据发送至采集工作站,由检测人员处理、评定;同时微型计算机发送信号至上位机,重复步骤S4~S8,检测下一部位;
步骤S10、当检测进行至钢板远端边缘,通过探测器运载车前轮的光电传感器寻找到边缘,重复步骤S3,检测焊缝远端端点,完成检测;
步骤S11、检测完成,探测器运载车与射线源移动车自动回到起点,收回探测器运载车。
进一步地,所述步骤S1包括,校正时,将探测器运载车吊起,将射线机的窗口与成像板的成像区域进行校对,先在不开射线的情况下进行暗场校正,再打开射线机,调整电压、电流进行暗场校正;校正完成的数据备份至上位机中,若检测条件不变,继续使用当前校正文件。
本发明采用数字射线检测技术,减少成像的中间环节,直接实现检测结果的数据化,减少中间环节,提高检测效率,实现绿色检测,满足高效建造场景下对质量检测的需求,减少对人工的依赖性。
附图说明
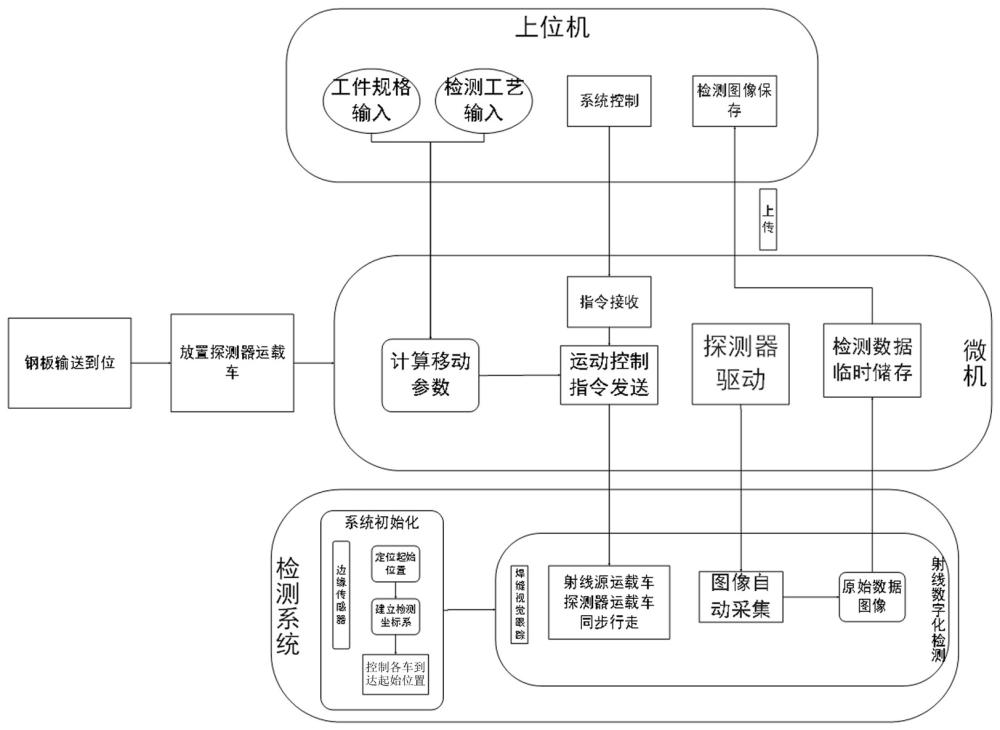
图1为本发明的系统结构图;
图2为本发明的实施流程图;
图3为射线源移动车的示意图;
图4为探测器运载车的示意图。
附图标记:
1射线源移动车、2射线源、3光栅、4视觉识别系统、5探测器运载车、
6辐射探测器。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明公开了一种适用于长直焊缝的数字射线检测装置,如图1所示,包括射线机、电控系统、机械传动系统、无线传输系统、视觉识别系统4和安全防护系统,机械传动系统包括射线源移动车1和探测器运载车5,射线机设置于射线源移动车1上,射线源移动车1由上位机无线控制沿导轨移动,探测器运载车5上设有辐射探测器6,电控系统和视觉识别系统4均设置于探测器运载车5上。
导轨的总长至少比待检焊缝长1m,以便检测焊缝的起始点和终点,轨道固定于施工现场地面,当现场地面无法通过打孔固定轨道装置时,可利用周边立架固定轨道部分结构。
电控系统包括微型计算机、可编程控制器和无线中继器,本发明检测装置远端操作由射线数字化检测采集工作站遥控,现场检测机构控制核心则采用可编程控制器结合微型计算机,满足遥控检测功能,电控系统通过路由中继由上位机无线控制采集,每个射线源移动车1或探测器运载车5车体都安装若干机械式手动按钮,以控制车体各轴的运动,检测人员可单独调整每个车体位置,再由上位机集中控制全部车体。
视觉识别系统4用于自动跟踪焊缝,并给电控系统提供信息反馈,保证探测器用车的直线移动,探测器运载车5采用麦克纳姆轮来为移动方向纠错。
安全防护系统包括辐射安全防护系统和设备安全防护系统,辐射安全防护包括屏蔽铅房和光栅3,上位机位于屏蔽铅房内,光栅3设置于射线机的窗口处,更好成像,避免过量曝光;该光栅3有1个自由度,X方向水平移动,光栅3由伺服电机控制。
设备安全防护系统包括光电传感器,光电传感器设置于探测器运载车5两侧前轮、后轮的边缘,光电传感器检测钢板边缘,当任意一个光电传感器检测到钢板边缘时,车体立即停止当前运动,并可以向反方向运动,由于每个射线源移动车1或探测器运载车5两侧均安装光电传感器,当车体移动到钢板起始端和终端,立即停止移动,射线源移动车1、探测器运载车5的结构参见图3和图4。
设备安全防护系统包括无线摄像头,无线摄像头安装在射线源移动车1和探测器运载车5上,无线摄像头检测四周环境,构成检测现场的全景监控。
上位机包括总控制台,总控制台设有电源急停按钮和射线急停按钮,电源急停按钮切断或开启本检测装置的总电源,射线急停按钮切断或开启射线机的电源。
射线机控制器和管头采用有线连接的方式,防止因信号干扰或屏蔽发生射线机失控,无法切断射线高压的情况。
射线源移动车1和探测器运载车5设有紧急停车按钮,紧急停车按钮可切断射线源移动车1和探测器运载车5的供电。
按下紧急停车按钮,紧急停止后,车体停在原地,切断射线机高压,如果当前焊缝未检测完,可从当前位置继续检测或者回原点重新检测,之前检测的图像数据备份在微型计算机和上位机中,不会因电控系统中断而丢失。
本发明还公开了一种适用于长直焊缝的数字射线检测方法,如图2所示,包括以下步骤:
步骤S1、辐射探测器6在检测之前进行亮场及暗场校正,校正时,将探测器运载车5吊起,将射线机的窗口与成像板的成像区域进行校对,先在不开射线的情况下进行暗场校正,再打开射线机,调整电压、电流进行暗场校正;校正完成的数据备份至上位机中,若检测条件不变,继续使用当前校正文件;
步骤S2、将探测器运载车5置于焊缝起点,系统自检,准备开始检测;
步骤S3、探测器运载车5车轮上的光电传感器寻找钢板近端边缘以及焊缝起点,计算机设立检测坐标系;
步骤S4、上位机控制射线源移动车1运动到起点位置,根据被检工件厚度,按照工艺要求设定曝光参数,上位机将参数信号发至射线机,射线机开启射线;
步骤S5、辐射探测器6向边缘伸出,检测焊缝端点,曝光完成后,探测器收回,准备检测焊缝主体;
步骤S6、探测器运载车5与射线源移动车1根据检测工艺中一次透照长度,向前行走相应距离,探测器运载车5通过视觉识别系统4保持跟随焊缝做直线行走运动,到位后发送信号至上位机;
步骤S7、射线源移动车1沿轨道行走,到位后发送信号至上位机;
步骤S8、上位机接收到探测器运载车5与射线源移动车1到位信号后,发送信号至探测器运载车5上的电控系统,电控系统控制辐射探测器6接收射线曝光采集图像;
步骤S9、采集完成后,辐射探测器6将采集到的图像原始数据发送至探测器运载车5上的微型计算机,临时储存,微型计算机通过无线网络将数据发送至采集工作站,由检测人员处理、评定;同时微型计算机发送信号至上位机,重复步骤S4~S8,检测下一部位;
步骤S10、当检测进行至钢板远端边缘,通过探测器运载车前轮的光电传感器寻找到边缘,重复步骤S3,检测焊缝远端端点,完成检测;
步骤S11、检测完成,探测器运载车与射线源移动车自动回到起点,收回探测器运载车。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。