基于无人机的立体成像方法和装置
文献发布时间:2024-01-17 01:15:20
技术领域
本发明属于无人机立体成像技术领域,具体为基于无人机的立体成像方法和装置。
背景技术
立体视觉是通过相采集点位置的不同实现的,例如人的左右眼之间存在一定距离,所成的相之间有细微差别,故能判断物体远近,相采集点之间的距离称为baseline,baseline越远,越容易获得立体视觉,或者说获得的立体视觉越明显。
目前,人们一般会采用无人机携带摄像机飞行,从而达到立体成像的效果,而现有技术中,采用双目摄像机获取立体图像,在图像分辨率、物体距离精度之间的权衡之下,导致的必然结果是双目摄像机之间距离较大。而小型无人机由于位置的限制,导致双目摄像机的应用十分受限。行业中多采用大型无人机进行相关测绘,成本高,不利于推广。
发明内容
针对上述情况,为克服现有技术的缺陷,本发明提供基于无人机的立体成像方法和装置,有效的解决了背景技术中提出的问题。
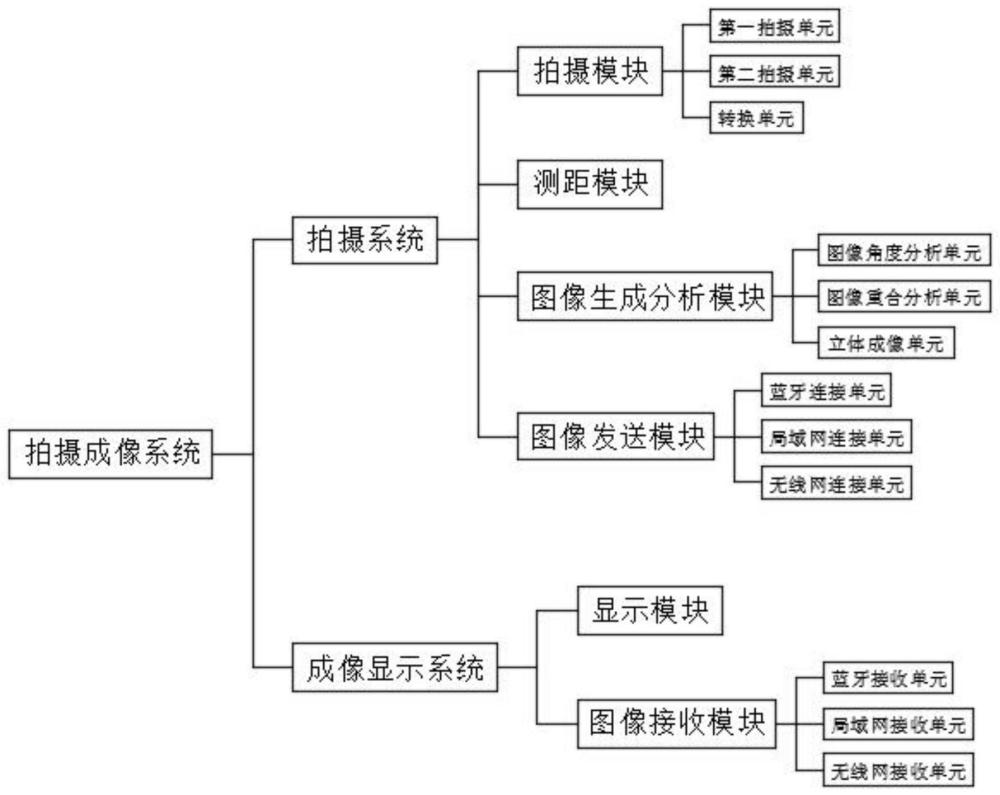
为实现上述目的,本发明提供如下技术方案:基于无人机的立体成像方法,包括无人机本体和液晶显示屏,所述无人机本体上设置有拍摄系统,所述液晶显示屏中设置有成像显示系统,所述拍摄系统包括拍摄模块、测距模块、图像生成分析模块及图像发送模块,所述拍摄模块包括第一拍摄单元、第二拍摄单元和转换单元,所述第一拍摄单元和第二拍摄单元均可进行图像拍摄,所述转换单元用于对第一拍摄单元和第二拍摄单元进行转换,所述测距模块用于对第一拍摄单元和第二拍摄单元的拍摄距离进行测量,所述图像生产分析模块同时与第一拍摄单元、第二拍摄单元及测距模块数据连接,且图像生成拍分析模块用于对多个拍摄的图像进行分析合成,且图像生成分析模块还与图像发送模块数据连接,并可将分析合成的图像发送至图像发送模块,所图像发送模块用于将合成的图像发送至成像显示系统;
所述图像显示系统包括显示模块和图像接收模块,所述图像接收模块与图像发送模块信号连接,并可接收图像发送模块发送的图像,所述显示模块用于对接受的图像进行显示;
具体使用方法如下:
一、通过无人机本体飞行至待拍摄位置一侧,通过第一拍摄单元对待拍摄位置进行拍摄,获得图像A,同时通过测距模块对拍摄距离进行测量,获得数据a,将图像A和数据a发送至图像生成分析模块;
二、移动无人机本体至待拍摄位置的另一侧,并通过转换单元对第一拍摄单元和第二拍摄单元进行转换,通过第二拍摄单元对带拍摄位置进行另一角度拍摄,获取图像B,同时通过测距模块对拍摄距离进行测量,获得数据b,将图像B和数据b发送至图像生成分析模块;
三、通过图像生成分析模块对图像A和图像B进行分析,同时根据数据a和数据b进行图像分析,并对图像A和图像B进行立体合成,获得立体图像C;
四、通过图像发送模块将立体图像C发送至成像显示系统,通过图像接收模块对立体图像C进行接收,并通过显示模块对立体图像C进行显示。
优选的,所述图像生成分析模块包括图像角度分析单元、图像重合分析单元及立体成像单元,所述图像角度分析单元用于对图像A和图像B的不同拍摄角度进行分析,确定图像A和图像B的拍摄角度,所述图像重合分析单元用于对图像A和图像B的重合位置进行分析确定,并对图像A和图像B进行立体成像模拟,所述立体成像单元用于根据图像角度分析单元和图像重合分析单元的分析数据及数据a、数据b进行图像立体合成。
优选的,所述图像发送模块包括蓝牙连接单元、局域网连接单元及无线网连接单元,所述图像接收模块包括蓝牙接收单元、局域网接收单元及无线网接收单元,所述蓝牙连接单元、局域网连接单元及无线网连接单元可分别与蓝牙接收单元、局域网接收单元及无线网接收单元数据连接。
优选的,所述第一转换单元采用第一摄像头、所述第二转换单元采用第二摄像头。
优选的,所述测距模块采用红外线测距仪。
优选的,所述转换单元包括柱体和转动机构,所述柱体安装在转动机构的下方并可进行转动。
基于无人机的立体成像装置,包括无人机本体、第一摄像头、第二摄像头、红外线测距仪、柱体和转动机构,其特征在于:所述转动机构中的盒体固定安装无人机本体的下侧中部,所述红外线测距仪固定安装在盒体的前侧中部,所述柱体与转动机构中的转杆下端固定连接,所述柱体的前后两侧分别开设有第一凹槽和第二凹槽,所述第一摄像头和第二摄像头分别安装在第一凹槽和第二凹槽中。
优选的,所述转动机构包括盒体、伺服电机、蜗杆、蜗轮及转杆,所述转杆通过轴承竖直转动设置在盒体的内部,所述蜗轮与转杆固定插接,所述蜗杆横向设置在盒体中并与蜗轮啮合连接,所述伺服电机设置在盒体的内部并与盒体的右内侧壁固定连接,且伺服电机的输出端与蜗杆的右端固定连接,所述转杆的下端延伸至盒体的下方并与柱体固定连接。
本发明的技术效果和优点:
1、通过无人机本体飞行至待拍摄位置一侧,通过第一拍摄单元对待拍摄位置进行拍摄,获得图像A,同时通过测距模块对拍摄距离进行测量,获得数据a,将图像A和数据a发送至图像生成分析模块;移动无人机主体至待拍摄位置的另一侧,并通过转换单元对第一拍摄单元和第二拍摄单元进行转换,通过第二拍摄单元对带拍摄位置进行另一角度拍摄,获取图像B,同时通过测距模块对拍摄距离进行测量,获得数据b,将图像B和数据b发送至图像生成分析模块;通过图像生成分析模块对图像A和图像B进行分析,同时根据数据a和数据b进行图像分析,并对图像A和图像B进行立体合成,获得立体图像C;通过图像发送模块将立体图像C发送至成像显示系统,通过图像接收模块对立体图像C进行接收,并通过显示模块对立体图像C进行显示,通过上述方式,能够自动对拍摄点进行转换,且能够自动对拍摄的多个图像进行多维分析,最后合成立体图像,不需要采用大型无人机,降低人们使用成本,便于人们使用。
附图说明
图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1为本发明的系统架构示意图;
图2为本发明的整体结构示意图;
图3为本发明的盒体的内部结构示意图;
图4为本发明的柱体的俯视剖面结构示意图。
图中:1、无人机本体;2、液晶显示屏;3、第一摄像头;4、第二摄像头;5、红外线测距仪;6、柱体;7、盒体;8、转杆;9、伺服电机;10、蜗杆;11、蜗轮。
具体实施方式
本发明提供了如图1-4所示的基于无人机的立体成像方法,包括无人机本体1和液晶显示屏2,无人机本体1上设置有拍摄系统,液晶显示屏2中设置有成像显示系统,拍摄系统包括拍摄模块、测距模块、图像生成分析模块及图像发送模块,拍摄模块包括第一拍摄单元、第二拍摄单元和转换单元,第一拍摄单元和第二拍摄单元均可进行图像拍摄,转换单元用于对第一拍摄单元和第二拍摄单元进行转换,测距模块用于对第一拍摄单元和第二拍摄单元的拍摄距离进行测量,图像生产分析模块同时与第一拍摄单元、第二拍摄单元及测距模块数据连接,且图像生成拍分析模块用于对多个拍摄的图像进行分析合成,且图像生成分析模块还与图像发送模块数据连接,并可将分析合成的图像发送至图像发送模块,图像发送模块用于将合成的图像发送至成像显示系统;
图像显示系统包括显示模块和图像接收模块,图像接收模块与图像发送模块信号连接,并可接收图像发送模块发送的图像,显示模块用于对接受的图像进行显示;
具体使用方法如下:
一、通过无人机本体1飞行至待拍摄位置一侧,通过第一拍摄单元对待拍摄位置进行拍摄,获得图像A,同时通过测距模块对拍摄距离进行测量,获得数据a,将图像A和数据a发送至图像生成分析模块;
二、移动无人机本体1至待拍摄位置的另一侧,并通过转换单元对第一拍摄单元和第二拍摄单元进行转换,通过第二拍摄单元对带拍摄位置进行另一角度拍摄,获取图像B,同时通过测距模块对拍摄距离进行测量,获得数据b,将图像B和数据b发送至图像生成分析模块;
三、通过图像生成分析模块对图像A和图像B进行分析,同时根据数据a和数据b进行图像分析,并对图像A和图像B进行立体合成,获得立体图像C;
四、通过图像发送模块将立体图像C发送至成像显示系统,通过图像接收模块对立体图像C进行接收,并通过显示模块对立体图像C进行显示。
如图1示,图像生成分析模块包括图像角度分析单元、图像重合分析单元及立体成像单元,图像角度分析单元用于对图像A和图像B的不同拍摄角度进行分析,确定图像A和图像B的拍摄角度,图像重合分析单元用于对图像A和图像B的重合位置进行分析确定,并对图像A和图像B进行立体成像模拟,立体成像单元用于根据图像角度分析单元和图像重合分析单元的分析数据及数据a、数据b进行图像立体合成。
如图1示,图像发送模块包括蓝牙连接单元、局域网连接单元及无线网连接单元,图像接收模块包括蓝牙接收单元、局域网接收单元及无线网接收单元,蓝牙连接单元、局域网连接单元及无线网连接单元可分别与蓝牙接收单元、局域网接收单元及无线网接收单元数据连接,能够采用多种方式将图像发送模块与图像接收模块进行数据信号连接,从而能够适应不同的使用环境,避免信号中断。
如图2和图4示,第一转换单元采用第一摄像头3、第二转换单元采用第二摄像头4,能够分别采用第一摄像头3和第二摄像头4进行拍摄。
如图1示,测距模块采用红外线测距仪5,能够对拍摄位置进行距离测量。
如图1示,转换单元包括柱体6和转动机构,柱体6安装在转动机构的下方并可进行转动。
如图2-4示,基于无人机的立体成像装置,包括无人机本体1、第一摄像头3、第二摄像头4、红外线测距仪5、柱体6和转动机构,转动机构中的盒体7固定安装无人机本体1的下侧中部,红外线测距仪5固定安装在盒体7的前侧中部,柱体6与转动机构中的转杆8下端固定连接,柱体6的前后两侧分别开设有第一凹槽和第二凹槽,第一摄像头3和第二摄像头4分别安装在第一凹槽和第二凹槽中。
同时,转动机构包括盒体7、伺服电机9、蜗杆10、蜗轮11及转杆8,转杆8通过轴承竖直转动设置在盒体7的内部,蜗轮11与转杆8固定插接,蜗杆10横向设置在盒体7中并与蜗轮11啮合连接,伺服电机9设置在盒体7的内部并与盒体7的右内侧壁固定连接,且伺服电机9的输出端与蜗杆10的右端固定连接,转杆8的下端延伸至盒体7的下方并与柱体6固定连接。
启动伺服电机9能够带动蜗杆10转动,蜗杆10转动带动蜗轮11转动,蜗轮11带动转杆8转动,转杆8转动带动柱体6转动,从而能够带动第一摄像头3和第二摄像头4转动,能够依次采用第一摄像头3和第二摄像头4进行拍摄使用。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。