夜光遥感数据降尺度处理方法
文献发布时间:2024-01-17 01:16:56
技术领域
本发明属于夜光遥感影像处理的技术领域,具体涉及一种夜光遥感数据降尺度处理方法。
背景技术
卫星夜光遥感为我们提供了观测夜间灯光的独特视角,使我们有机会从太空角度大范围监测地表夜间灯光的强度和变化。夜间灯光遥感影像已被广泛应用于城市空间结构及演化规律的分析研究(包括城市要素及内部空间结构、城市区域、城市体系等级、城市群结构以及城市化进程综合监测),多类社会经济发展指标的估算(如人口、GDP、电力消耗、碳排放、货运总量、城市住房空置率),区域公共安全监测(包括自然灾害、疫情、节日、战争、环境)等领域。
目前,常用的两种夜光数据DMSP-OLS(Defense Meteorological SatelliteProgram's Operational Line-Scan System,DMSP/OLS)、NPP-VIIRS(Suomi NationalPolar-Orbiting Partnership- the Visible Infrared Imaging Radiometer Suite,NPP-VIIRS)是区域以及全球尺度人类活动研究的重要数据。然而,由于其分辨率较低(DMSP-OLS分辨率2.7km、NPP-VIIRS分辨率约742m),易导致灯光总量和照明区域高估等问题,难以满足进一步精细化研究的需要。
降尺度是提升夜光遥感数据的重要手段。学者研究了许多降尺度方法,总结如下:1、基于插值的空间预测降尺度方法(如:反距离权重插值、克里金插值等);2、基于回归建模降尺度方法 (如:各种统计和机器学习模型,包括线性模型、神经网络和支持向量机;3、基于过程的数值模型降尺度方法;4、基于深度学习的降尺度方法。其中,基于深度学习的降尺度方法考虑了空间像素邻域信息,是目前研究较多的方法。
但是,对于夜光遥感来说,其数据与日间遥感数据有很大区别:第一,数据分布不均衡:一般日间遥感数据为正态分布,而夜光数据为不均衡的长尾分布,其中低像素值占比较大;数据分布不均衡对于深度学习建模可能造成过拟合的问题;第二,特征分布离散、具体:夜光遥感图像中灯光的包含有效信息的像素较少,多数像素为无灯光区域的背景像素,对建模影响大;需要将降尺度所需的尺度因子融入深度学习模型;第三,与自然图像相比,现有夜光遥感数据分辨率极低,解空间的可能性是无穷的,很难获得唯一的深度学习模型。进一步导致可能存在多个高分辨率图像与低分辨率图像相对应,即图像的解空间是无限的。
已有深度学习模型在设计时没有考虑夜光的数据特点,缺少适用于夜光遥感数据降尺度的深度学习模型。
发明内容
本发明的目的在于针对现有技术的不足之处,提供一种夜光遥感数据降尺度处理方法,该方法能对分辨率低的夜光遥感数据进行降尺度处理以获得目标高分辨率的夜光遥感数据,解决了夜间灯光遥感数据的深度学习模型缺失问题。
为解决上述技术问题,本发明采用如下技术方案:
一种夜光遥感数据降尺度处理方法,包括如下步骤:
步骤1、获取待降尺度处理的夜光遥感数据、夜光尺度因子以及目标尺度的夜光遥感实测数据并对其进行预处理;
步骤2、构建用于对夜光数据进行降尺度处理的CMSRM深度学习降尺度模型;
步骤3、采用步骤1处理后的标尺度的夜光遥感实测数据对步骤2构建的CMSRM深度学习降尺度模型进行训练;
步骤4、采用训练后的CMSRM深度学习降尺度模型结合步骤1的夜光尺度因子对步骤1获得的待降尺度处理的夜光遥感数据进行降尺度处理得到目标尺度的夜光遥感数据。
进一步地,步骤1中对夜光遥感影像数据进行预处理的方法为:
经过重采样方法将夜光遥感数据空间分辨率重采样到高空间分辨率标签数据的整数倍。
进一步地,夜光尺度因子包括与夜光高度相关且同时期的不透水面数据和OSM矢量路网数据。
进一步地,对于夜光尺度因子的预处理方法为:
采用重采样方法将不透水面数据分辨率重采样到CMSRM深度学习降尺度模型要求的分辨率;
对于OSM矢量路网数据,将其转换为CMSRM深度学习降尺度模型要求的栅格数据,转换过程中输出指定的空间分辨率。
进一步地,对目标尺度的夜光遥感实测数据进行预处理包括:对其进行降噪以及几何校正。
进一步地,CMSRM深度学习降尺度模型包括卷积层、上采样层、参数化整流线性单元以及连接层,其中,
卷积层用于将输入图像与滤波器核卷积来生成特征图;
上采样层用于对特征图进行卷积和多通道间的重组得到高分辨率的特征图;
参数化整流线性单元的激活函数用于实现准确的网络非线性建模;
连接层,用于在通道维度将尺度因子与夜光特征融合。
进一步地,步骤2中,CMSRM深度学习降尺度模型在降尺度处理过程中先将原始的低分辨率尺度1x处理成中间过渡尺度2x,再将中间过渡尺度2x处理成目标高分辨率尺度4x,两个步骤中均有相似的降尺度过程。
进一步地,步骤2中,CMSRM深度学习降尺度模型降尺度过程为:
在每个降尺度过程中,首先采用卷积层对上一尺度的低分辨率夜光图像进行卷积拓展特征的通道数;
随后采用上采样层放大夜光图像特征矩阵到2x分辨率,恢复更多的空间细节;
然后通过连接层将夜光图像的特征矩阵和尺度因子矩阵连接;
之后多次应用卷积层和参数化整流线性单元激活函数的组合来生成新的特征矩阵,以捕获更深层的上下文信息;
最后采用卷积层将特征矩阵转换为该尺度的降尺度结果;
采用以上述方法进行两次相同降尺度过程,最终获取4x分辨率的降尺度结果。
进一步地,步骤3中,对CMSRM深度学习降尺度模型进行训练的过程中,统计样本直方图,做反比加权操作,即对占比较多的低值像素赋予较低的权重,对占比较少的高值像素赋予较高的权重。
与现有技术相比,本发明的有益效果为:
1)为了解决图像的解空间无限问题,本发明提出了引入先验约束的CMSRM深度学习降尺度模型,在利用深度学习降尺度夜光数据过程中引入高分辨率的尺度因子作为先验信息约束,有助于高效准确地构建夜光遥感领域的降尺度深度学习模型;
2)由于低空间分辨率夜光数据必要细节严重损失,一次性降尺度到目标尺度难度较大(如1x到4x),因此引入多尺度降尺度策略,在逐尺度降尺度过程中,尺度因子在不同尺度下提供对应的约束,提升降尺度精度;
3)顾及到数据分布不均衡特点,本发明在构建模型过程中,将离散数据的不均衡分类的加权约束思想中引入夜光遥感数据降尺度中,即在降尺度中根据数据直方图,赋予反比权重,对占比较大的像素(如0)赋予较小的权重。
附图说明
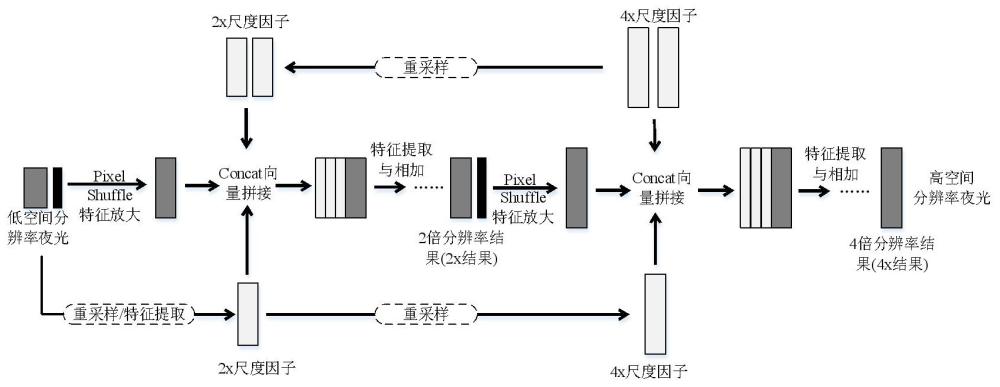
图1 为本发明实施例CMSRM深度学习降尺度模型的结构图;
图2 为本发明实施例夜光遥感影像深度学习降尺度前后的对比图,(a)降尺度前,(b)降尺度后。
具体实施方式
下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合具体实施例对本发明作进一步说明,但不作为本发明的限定。
本发明一种夜光遥感数据降尺度处理方法,其特征在于,包括如下步骤:
步骤1、获取夜光遥感数据、夜光尺度因子以及目标尺度的夜光遥感实测数据并对其进行预处理;
在本实施例中,选择2018年的NPP/VIIRS DNB Black Marble夜光遥感数据作为降尺度目标数据;夜光尺度因子选择与夜光高度相关且同时期的30m空间分辨率GAIA不透水面数据和OSM矢量路网数据;同时,获取2018年130m空间分辨率的夜光遥感数据Luojia1-01作为训练的标签数据。
对数据进行预处理,具体为:对NPP/VIIRS DNB Black Marble数据、不透水面数据、路网数据、Luojia1-01数据进行预处理。原始NPP/VIIRS DNB Black Marble数据分辨率为500m,需要经过重采样方法(采用最邻近像元方法)将其空间分辨率重采样到高空间分辨率标签数据的整数倍,方便模型运行;本实施例中重采样为标签数据的4倍,即520m空间分辨率。对于尺度因子来说,为保证不同尺度的数据能够同时进行学习,给不同尺度的模型运算提供约束信息,需要为每个尺度的降尺度运算提供相应分辨率的尺度因子。对于30m空间分辨率的不透水面数据,本实施例采用cubic重采样方法将其分辨率重采样到260m、130m,与模型要求保持一致。OSM矢量路网数据由于其数据格式为矢量格式,利用地理信息工具将其转换为深度学习模型要求的栅格数据,转换过程中可以指定输出的空间分辨率,将数据输出为260m、130m。对于130m空间分辨率的Luojia1-01,为保证其数据标签质量,对其进行降噪,几何校正预处理。
步骤2、构建用于对夜光数据进行降尺度处理的CMSRM深度学习降尺度模型;
本实施例构建CMSRM深度学习降尺度模型,采用该模型将500m空间分辨率的NPP/VIIRS DNB Black Marble夜光遥感数据分辨率提升(降尺度)到130m空间分辨率。具体的,如图1所示,CMSRM深度学习降尺度模型包括:
卷积层(Conv),通过将输入图像与滤波器核(例如3×3)卷积来生成特征图;
上采样层(PixelShuffle),通过卷积和多通道间的重组得到高分辨率的特征图,并且可以有效去除其他特征放大方法存在的棋盘效应;
参数化整流线性单元(PReLU)激活函数,在负值域,PReLU有一个较小斜率,可以避免Dead ReLU问题,实现准确的网络非线性建模;
Concat连接层,在通道维度将尺度因子与夜光特征融合。
CMSRM深度学习降尺度模型包括三个渐进尺度:原始的低分辨率尺度、中间过渡尺度、目标高分辨率尺度,在本实施例分别对应表示为520m、260m、130m。
CMSRM深度学习降尺度模型逐尺度对夜光影像进行降尺度,在本实施例中,整个降尺度过程分为两步:520m到260m、260m到130m,两个步骤中均有相似的降尺度过程。
降尺度过程为:
以520m到260m降尺度过程为例进行讲解,260m到130m以此类推。为了确保特征矩阵满足PixelShuffle上采样方法的要求,首先对520m空间分辨率的夜光图像使用一次卷积拓展特征的通道数(1通道转换为4通道);
随后利用PixelShuffle方法放大夜光图像特征矩阵到260m空间分辨率,恢复更多的空间细节;
通过Concat连接方法,本实施例将260m空间分辨率夜光图像的特征矩阵和260m空间分辨率的不透水面数据、路网数据尺度因子矩阵连接;
之后再应用10次Conv和PReLU的组合来生成新的特征矩阵,以捕获更深层的上下文信息;
最后应用一个卷积将特征矩阵转换为260m空间分辨率的降尺度结果。
以上述方法通过两次降尺度过程(520m到260m,260m到130m) ,最终获取130m分辨率的降尺度结果。
步骤3、采用步骤1处理后的目标尺度的夜光遥感实测数据对步骤2构建的CMSRM深度学习降尺度模型进行训练;
在训练过程中统计样本直方图,做反比加权操作(即占比较多的低值像素赋予较低的权重,占比较少的高值像素赋予较高的权重),以解决夜光数据的分布不平均对建模的影响。具体操作如下:在训练前,对夜光遥感数据训练样本进行像素统计,根据夜光遥感图像特点,夜光遥感数据的分布是低值较多,高值较少的长尾分布;低值较多,而高值较少可能造成CMSRM深度学习降尺度模型学习不到夜光数据的高值辐射特征;因此,分别对低值和高值区间进行统计,根据像素统计数量对其取倒数,作为权重与像素值相乘,输入CMSRM深度学习降尺度模型。
步骤4、采用训练后的CMSRM深度学习降尺度模型结合步骤1处理后的夜光尺度因子对步骤1预处理后的待降尺度处理的夜光遥感数据进行降尺度处理得到目标尺度的夜光遥感数据。
将步骤1中处理后的待降尺度处理的夜光遥感数据输入到训练后的CMSRM深度学习降尺度模型中进行降尺度处理,获得所需目标分辨率的图像,结果见图2所示,图2中(a)图为降尺度处理前的图像,图2中(b)图为降尺度处理后的图像,从图2可以看出,降尺度处理后的图像清晰度大大提高。
在原始NPP/VIIRS DNB夜光数据中,由于其低空间分辨率,受到灯光的开花效应和散射辐射影响,许多原本较暗的像素(较低的NTL强度),被周围亮度较强的区域带来了额外灯光点亮,城市区域似乎是一个略有渐变的照明光斑(图2中(a)图所示),城市内部NTL辐射的异质性较弱,灯光分布特征不明显甚至完全消失,无法更细致地表达城市内部情况。
与原始NPP相比,降尺度结果质量有了显著改善,随着空间分辨率的提高,抑制了来自于灯光的散射辐射和粗空间分辨率的平滑作用被有效的削弱,灯光的空间变化更为明显。从城市整体角度来看,夜光亮度随着城市中心向城市边缘过渡逐渐递减,主要道路和多数光源可以被识别出来。
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。