一种基于三维重建的煤堆体积测量方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及煤堆体积测量相关领域,具体为一种基于三维重建的煤堆体积测量方法。
背景技术
现有技术中,对于煤堆的体积测量,人工测量浪费时间较长,且煤堆周围的污染物较多,给测量人员身体健康带来影响,且人工测量容易出现误差,影响测量结果。
发明内容
本发明的目的在于提供一种基于三维重建的煤堆体积测量方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于三维重建的煤堆体积测量方法,包括以下步骤:
S1、开始,然后无人机获取图像;
S2、无人机采集的图像数据经三维重建可获取煤堆场景的点云模型及关键帧位姿数据,同时无人机的定位数据可为三维重建的结果提供尺度信息,该过程即是无人机定位轨迹数据点与三维重建位姿估计轨迹点的配准过程,首先通过时间轴信息将两组轨迹点信息进行关联对应,假设该两组配对后的点云为:P={p
S3、在步骤S2中获取真实尺度的点云基础上,结合煤堆实际场景的空间尺寸约束和过滤方法提纯煤堆点云数据,且包括在生成点云的过程中会把部分非感兴趣区域的内容和一些离散的误差噪音点添加至点云结果中,针对这两种情况,分别提出以下对应的解决方法:方法1、针对非感兴趣区域,通过三维空间平面方程对非感兴趣区域直接进行切割剔除;方法2、针对随机误差噪音点,通过离群点检测算法进行剔除;
S4、根据场景的空间尺寸约束拟合水平面方程及煤堆表面点云数据,并计算所有煤堆点云距水平面高度以生成新点云数据,由步骤S3中输入的煤堆场景实际空间尺寸,可使用场景点云非感兴趣区域进行煤堆周边水平面拟合,同时对于煤堆的表面点云数据进行曲面拟合,在此基础上,对煤堆表面点云数据依据点云密度要求进行间隔采样,重新计算煤堆表面点云距水平面的高度,获取修正后的点云数据,以便于后续的点云投影和体积计算;
S5、接着将所有煤堆表面3D点投影至水平面的2D点,进一步对所有2D点云求Delaunay三角网,获取Delaunay三角网格的步骤为:
S51、构造一个超级三角形,包含所有散点,放入三角形链表;
S52、将点集中的散点依次插入,在三角形链表中找出其外接圆包含插入点的三角形,删除影响三角形的公共边,将插入点同影响三角形的全部顶点连接起来,从而完成一个点在Delaunay三角形链表中的插入;
S53、根据优化准则对局部新形成的三角形进行优化,将形成的三角形放入Delaunay三角形链表;
S54、循环执行上述捕捉S52,直到所有散点插入完毕;
由于Delaunay剖分具备最接近和区域性的特性,故采用步骤S51-S54对点集所构成的平面进行拟合,步骤S51-S54可以获得三角形的集合以及三角形中每个顶点对应的距离,取三个顶点距离的平均值作为三棱柱的高,每个三角形的面积按照以下公式计算,其中,(x
S6、剔除异常三棱柱,将所有有效三棱柱体积进行积分得出煤堆真实体积。
优选的,步骤S6中可以将三维重建后点云体积的求解转化成对多个三棱柱积分的求解,因为所有三棱柱的体积值都分布在某一个区间内,对于部分偏差较大的三棱柱体积值应该通过算法进行剔除,步骤S6中通过采用箱形图的方法进行计算,能够准确稳定地描绘出数据的离散分布情况,同时也利于数据的清洗,需要求解出数据中的5个特征数据值,包括下四分位Q
优选的,步骤S3中的方法1为在三维重建后的点云中,只需要收集感兴趣区域内的3D点集,可以通过场景的实际尺寸信息约束求出空间切面方程对场景进行切割。
优选的,步骤S3中的方法2为采用统计滤波器即为对每个点的邻域进行一个统计分析,并修剪掉一些不符合标准的点,具体方法为在输入数据中对点到临近点的距离分布的计算,对每一个点,计算它到所有临近点的平均距离,那么平均距离在标准范围之外的点,可以被定义为离群点并从数据中去除。
与现有技术相比,本发明的有益效果是:通过结合计算机视觉和几何计算的流程,融合无人机定位信息,可获取到具有真实尺度的煤堆点云,在此基础上可以求解出煤堆的实际体积。
附图说明
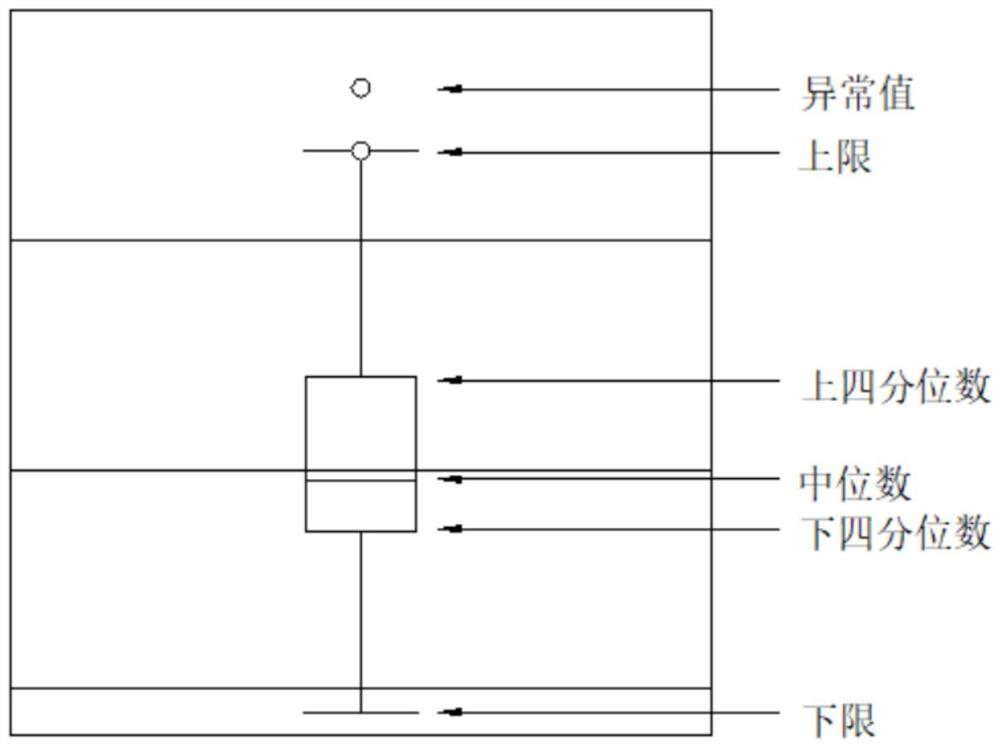
图1为本发明的箱型图示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供一种技术方案:一种基于三维重建的煤堆体积测量方法,包括以下步骤:
S1、开始,然后无人机获取图像;
S2、无人机采集的图像数据经三维重建可获取煤堆场景的点云模型及关键帧位姿数据,同时无人机的定位数据可为三维重建的结果提供尺度信息,该过程即是无人机定位轨迹数据点与三维重建位姿估计轨迹点的配准过程,首先通过时间轴信息将两组轨迹点信息进行关联对应,假设该两组配对后的点云为:P={p
S3、在步骤S2中获取真实尺度的点云基础上,结合煤堆实际场景的空间尺寸约束和过滤方法提纯煤堆点云数据,且包括在生成点云的过程中会把部分非感兴趣区域的内容和一些离散的误差噪音点添加至点云结果中,针对这两种情况,分别提出以下对应的解决方法:
方法1、针对非感兴趣区域,通过三维空间平面方程对非感兴趣区域直接进行切割剔除;
方法2、针对随机误差噪音点,通过离群点检测算法进行剔除;
S4、根据场景的空间尺寸约束拟合水平面方程及煤堆表面点云数据,并计算所有煤堆点云距水平面高度以生成新点云数据,由步骤S3中输入的煤堆场景实际空间尺寸,可使用场景点云非感兴趣区域进行煤堆周边水平面拟合,同时对于煤堆的表面点云数据进行曲面拟合,在此基础上,对煤堆表面点云数据依据点云密度要求进行间隔采样,重新计算煤堆表面点云距水平面的高度,获取修正后的点云数据,以便于后续的点云投影和体积计算;
S5、接着将所有煤堆表面3D点投影至水平面的2D点,进一步对所有2D点云求Delaunay三角网,获取Delaunay三角网格的步骤为:
S51、构造一个超级三角形,包含所有散点,放入三角形链表;
S52、将点集中的散点依次插入,在三角形链表中找出其外接圆包含插入点的三角形,删除影响三角形的公共边,将插入点同影响三角形的全部顶点连接起来,从而完成一个点在Delaunay三角形链表中的插入;
S53、根据优化准则对局部新形成的三角形进行优化,将形成的三角形放入Delaunay三角形链表;
S54、循环执行上述捕捉S52,直到所有散点插入完毕;
由于Delaunay剖分具备最接近和区域性的特性,故采用步骤S51-S54对点集所构成的平面进行拟合,步骤S51-S54可以获得三角形的集合以及三角形中每个顶点对应的距离,取三个顶点距离的平均值作为三棱柱的高,每个三角形的面积按照以下公式计算,其中,(x
S6、剔除异常三棱柱,将所有有效三棱柱体积进行积分得出煤堆真实体积。
进一步的,步骤S6中可以将三维重建后点云体积的求解转化成对多个三棱柱积分的求解,因为所有三棱柱的体积值都分布在某一个区间内,对于部分偏差较大的三棱柱体积值应该通过算法进行剔除,步骤S6中通过采用箱形图的方法进行计算,能够准确稳定地描绘出数据的离散分布情况,同时也利于数据的清洗,箱形图如图1所示,需要求解出数据中的5个特征数据值,包括下四分位Q
进一步的,步骤S3中的方法1为在三维重建后的点云中,只需要收集感兴趣区域内的3D点集,可以通过场景的实际尺寸信息约束求出空间切面方程对场景进行切割。
进一步的,步骤S3中的方法2为采用统计滤波器即为对每个点的邻域进行一个统计分析,并修剪掉一些不符合标准的点,具体方法为在输入数据中对点到临近点的距离分布的计算,对每一个点,计算它到所有临近点的平均距离,那么平均距离在标准范围之外的点,可以被定义为离群点并从数据中去除。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于单目相机三维重建的大型煤堆体积测量方法
- 基于多目普通摄像机的大型煤堆体积测量方法