智能安全帽
文献发布时间:2023-06-19 10:55:46
技术领域
本申请涉及一种智能安全帽,尤其涉及AI智能安全帽。
背景技术
随着智能可穿戴设备的兴起,越来越多的功能被集成到诸如手表、眼镜等的服装或饰品中,这些智能可穿戴设备可以起到诸如语音和数据通信、监控佩戴者或穿戴者的健康状况、获得佩戴者或穿戴者的位置等功能。
在工程领域,智能可穿戴设备尤其是智能安全帽也越来越受到重视,这些智能安全帽可以为佩戴者提供图像采集、语音通信、位置确定和导航、危险提示或报警等作用,从而在作为传统安全帽保护佩戴者的安全的同时,也为佩戴者提供多种辅助功能。这种智能工程头盔或智能安全帽在例如电力巡检、消防和煤矿等工地起到有益的作用。
但是,在工程机械领域,还没有提出适合工程机械方面的智能安全帽。工程机械,例如,挖掘机,需要有经验的操作者才能熟练掌握各种操作方式,由此完成所需的工程任务。但是,操作者的培训需要相对长的时间。另外,如何评价每个操作者的技术熟练程度也是工程机械领域需要解决的问题。
工程机械,例如,挖掘机是比较昂贵的设备,通常施工单位在工程建设中从设备拥有者处租赁这些设备,设备拥有者需要了解出租设备的使用状况和维护保养情况,因此,也急需一种能够对工程机械进行现场管理的设备。
发明内容
为了解决现有技术中遇到的问题,提出了本发明。根据本发明的一个方面,提供了一种智能安全帽,包括帽体、帽檐、摄像头组件和控制器,其中,所述摄像头组件至少包括第一摄像头和第二摄像头,所述第一摄像头被构造成对第一取景范围内取像,所述第二摄像头被构造成对第二取景范围取像,所述第一取景范围与所述第二取景范围不同,所述控制器被构造成获得所述第一摄像头对第一取景范围获得的第一图像和所述第二摄像头对第二取景范围获得的第二图像,并将所述第一图像和第二图像按照时间相互关联。
在一个实施例中,所述第一取景范围是所述智能安全帽的佩戴者的正前方预定范围,所述第二取景范围是所述佩戴者的前下方的预定范围。
在一个实施例中,所述控制器被构造成将相关联的所述第一和第二图像发送到远程控制中心进行处理且/或将相关联的所述第一和第二图像保存在本地的存储单元以便将来导出进行处理或在本地处理。
在一个实施例中,所述处理包括识别所述第一图像中的第一预定识别对象和所述第二图像中的第二预定识别对象,所述第一预定识别对象与所述第二预定识别对象不同。
在一个实施例中,所述处理还包括将所述第一图像分解成多个帧,并且识别每个帧中的第一预定识别对象,并根据每个帧中的第一预定识别对象的位置确定所述第一预定识别对象的动作信息。
在一个实施例中,所述处理还包括将所述第二图像分解成多个帧,并且识别每个帧中的第二预定识别对象,并根据每个帧中的第二预定识别对象的位置确定所述第二预定识别对象的移动轨迹信息。
在一个实施例中,所述处理还包括将所述第一预定识别对象的动作信息与所述第二预定识别对象的移动轨迹信息相关联,以确定所述智能安全帽的佩戴者的技术水平等级。
由此,通过根据本公开的智能安全帽,可以根据操作者的手部动作、工作的完成程度来评价操作者的技术水平等级。
进一步地,所述控制器被构造成与智能安全帽的佩戴者所操纵的设备相通信,以获得表示所述设备的工作状况的信息。
在一个实施例中,所述控制器被构造成将所述表示所述设备的工作状况的信息与所述第一和第二图像根据时间相关联。
在一个实施例中,所述处理还包括将所述第一预定识别对象的动作信息、所述第二预定识别对象的移动轨迹信息以及表示所述设备的工作状况的信息相关联,以确定所述智能安全帽的佩戴者的技术水平等级。
由此,通过本智能安全帽,可以获得操作者的个人操作动作、设备的工作完成程度以及设备的油耗等信息来衡量操作者的技术水平。
在一个实施例中,所述第一识别对象包括所述智能安全帽的佩戴者所操纵的设备的作业末端,且/或所述第二识别对象是所述佩戴者的手部,且/或所述表示所述设备的工作状况的信息包括由所述设备的瞬时油耗、发动机的参数、设备的噪声、设备的作业机构的油压中的至少一项。
作为一个具体实施例,所述设备是挖掘机,所述第一识别对象是挖掘机的挖斗,所述设备的作业机构包括所述挖掘机的油泵。
在一个实施例中,所述处理包括将所述第一预定识别对象与参照对象相比较,并且在所述第一预定识别对象与所述参照对象不同时,发出报警信息。
在一个实施例中,所述处理还包括在发出报警信息时远程指令所述智能安全帽的佩戴者所操纵的设备停机。
在一个实施例中,所述控制器被构造成在发出报警信息时将该信息记录在所述控制器的存储单元中。
在一个实施例中,所述处理包括将技术水平等级被确定为高的佩戴者的移动轨迹信息保存为指导信息。
在一个实施例中,所述智能安全帽还包括光机组件,所述光机组件向所述智能安全帽的佩戴者显示指令信息和/或指导信息。由此,可以将技术数量的操作者的操作方式存储为指导信息并且利用该指导信息指导其他初级操作者,以为这些初级操作者提供实施现场培训,并快速提高这些初级操作者的操作水平。
在一个实施例中,所述指令信息包括指示所述智能安全帽的佩戴者工作内容的信息,该信息被事先存储或传输到所述智能安全帽,或自远程控制器或其他智能安全帽实时地或非实时地传输到所述智能安全帽。
在一个实施例中,所述第一识别对象包括所述智能安全帽的佩戴者所操纵的设备的作业末端,且/或所述第二识别对象是所述佩戴者的手部。
在一个实施例中,所述智能安全帽还包括扬声器,所述扬声器能够与所述光机组件的显示一起或单独地向所述佩戴者传达所述指导信息。
在一个实施例中,所述处理还包括将所述佩戴者的手部的移动轨迹信息与所述指导信息相比较并且在二者不同时发出提醒。通过实时地将指导信息和实际操作相比较,可以纠正初级操作者的操作错误,快速提高初级操作者的操作水平。
在一个实施例中,还包括麦克风和/或按钮,所述智能安全帽的佩戴者通过所述麦克风和/或所述按钮输入信息。
在另一方面,提供了一种工程机械的操作者的技术水平评价方法,包括如下步骤:
提供如上所述的智能安全帽;
在所述操作者操纵所述工程机械的同时,利用所述智能安全帽的摄像头组件获取第一图像和第二图像;
将所述第一图像分解成多个帧,识别每个帧或至少一些帧中的工程机械的作业末端,并将识别的信息组合以获得该作业末端的信息;
将所述第二图像分解成多个帧,识别每个帧或至少一些帧中的操作者的手部的位置,并将识别的位置信息组合以获得操作者手部位置的运动轨迹信息;
将所述作业末端的信息和所述手部的运动轨迹信息相关联,以评价所述操作者的技术水平的等级。
在一个实施例中,所述方法还包括:
获得表示所述工程机械的工作状况的信息;
将表示所述工程机械的工作状况的信息与所述作业末端的信息和所述手柄的运动轨迹信息相关联,以评价所述操作者的技术水平等级。
作为一个具体实施例,所述作业末端的信息包括所述作业末端的位置信息和所述作业末端的动作信息。
作为一个具体实施例,所述工程机械为挖掘机,所述动作信息包括挖满斗、挖半斗、空斗、粉碎、起吊中的至少一个。
作为一个具体实施例,所述表示工程机械的工作状况的信息包括所述工程机械的瞬时油耗、发动机的参数、设备的噪声、工程机械的作业机构的油压中的至少一项。
在一个实施例中,所述方法还包括:
将技术水平等级评价为高的操作者的作业末端的信息和运动轨迹信息存储为指导信息;
通过所述智能安全帽的光机组件显示该指导信息。
在另一方面中,本申请提供了一种工程机械施工现场管理方法,包括:
提供如上所述的智能安全帽;
将所述第一图像分解成多个帧,并识别至少其中一些帧中的第一预定识别对象;
根据识别出的第一预定识别对象确定该第一预定识别对象的工作内容;
将确定的工作内容与参考工作内容相比较,并且在所述确定的工作内容与所述参考工作内容不同时,发出报警信息。
在一个实施例中,所述报警信息被传送到远程控制中心且/或存储在所述智能安全帽的存储单元内。
在一个实施例中,所述远程控制中心在收到该报警信息时停止所述工程机械的操作。
由此,利用本发明的智能安全帽,可以实时监控工程机械施工现场的情况,评价操作者的操作水平以及快速对初级操作者进行培训。
附图说明
虽然本说明书以具体地指出并明确地要求保护被视为本发明实施例的内容的权利要求书结束,但在结合附图阅读时,可以根据本公开的实施例的某些实例的描述更容易地确定本公开的实施例的优势,在附图中:
图1是示出根据本公开的智能安全帽的透视图;
图2是示出根据本公开的智能安全帽的封闭壳的分解视图;
图3是示出摄像头组件的透视图;
图4是示出下壳的外部透视图;
图5是示出摄像头组件和光机组件的透视图;
图6是示出摄像头组件的透视图;
图7是示出摄像头组件安装在下壳内部的透视图;
图8是示出摄像头组件的拍摄范围的示意图;以及
图9是摄像头组件获取的图像的示例。
具体实施方式
下面参照附图,详细描述根据本发明的智能安全帽。虽然结合以上数个优选实施例公开了本发明,然而其并非用以限定本发明,任何所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,可作任意的更动与润饰,因此本发明的保护范围应当以附上的权利要求所界定的为准。
在下面的描述中,混合使用了安全帽、头盔或工程头盔等称谓,但是应该理解的是,这些称谓是同等含义,可以互换。使用的诸如前、向前或前部等方向性术语是指在智能安全帽被使用者正确佩戴时朝向使用者所面对的方向,而后、向后或者后端部等方向性术语是指佩戴者后脑所朝向的方向,而左、向左或左侧以及右、向右或右侧是指佩戴者的左手的方向和右手的方向。而对于安全帽而言,其内、向内或内部是指在安全帽被使用者佩戴时朝向佩戴者的头部的方向,而外、向外或外部是指与内、向内或内部相反的方向。
在下面的描述中以及在权利要求书中,使用了诸如连接、耦接、连通等术语,这些术语应该做宽泛解释,不仅包括一个元件与另一个元件直接连接、耦接、连通等,也包括一个元件和另一个元件通过中间元件连接、耦接或连通。在下面的描述中,采用了序数词“第一”、“第二”等,这些序数词的使用仅仅用于将一个元件与另一个元件区分开,而非用于表示某个元件的重要性,更不能理解为这个元件对本发明而言是必不可少的。
下面,参照附图,详细描述根据本公开的智能工程头盔或智能安全帽,要指出的是,智能工程头盔和智能安全帽在本说明书中是相同的含义,并且可以互换使用。要指出的是,在附图中,示出了根据本公开的一个实施例的智能安全帽,出于图示清楚的目的,这些附图并非按照比例绘制,并且也根据需要省略一些零件,应该理解的是,本公开不应局限于附图中示出的结构。在下面的描述中,要指出的是,术语“图像”应广义地理解,不仅包括静态图像(图片)也包括动态连续或非连续图像(视频),本发明并不局限于任何一种。
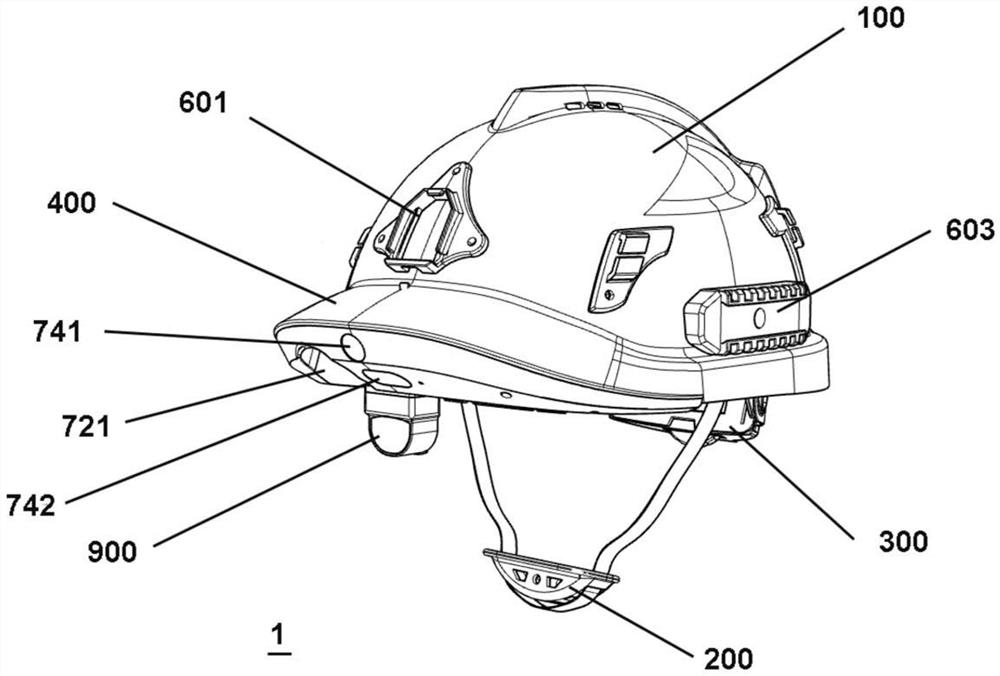
下面参照图1和图2,详细描述根据本公开的智能安全帽1的结构,其中,图1是根据本公开的智能安全帽的透视图,而图2是根据本公开的智能安全帽1的分解视图。
如图1所示,智能安全帽1包括帽壳100、下颌带200、后颈箍300、帽檐400和内衬(未示出)。另外,在帽壳100的外表面上还设置有挂件,例如,前挂件601、上挂件602、侧挂件603、通用挂件604等,以根据需要在安全帽1上挂装其他装置,例如照明灯等。
帽壳100通常由金属、塑料、玻璃钢等材料制成,并且在帽壳上形成有加强筋,以提高帽壳100的强度。内衬连接在帽壳内部,并且与帽壳之间通常具有25-50mm的间隙,以便当物体打击到安全帽的帽壳时,帽壳不会因受力变形而直接影响到佩戴者的头部。下颌带200的长度可以调节,以确保安全帽1牢靠地佩戴在使用者的头部上,后颈箍300同样起到定位的作用。
帽檐400和帽壳100是一体形成的,在帽檐400的下方,可拆卸地安装封闭壳700,该封闭壳700由上壳710和下壳720构成,并且上壳710和下壳720可拆开并可组合到一起,以构成一个封闭的空间,智能安全帽1的电子器件和控制电路(见图2)等设置在该封闭空间内。该封闭空间是密封的,以防止雨水、汗水、呼气中的水分等侵入并损坏其中的电子器件和控制电路等。通过将容纳电子器件和控制电路等容纳在封闭壳700内,并且将封闭壳700可拆卸地安装在帽檐400的下方,在电子器件或控制电路发生变化,例如,更新或维修的情况下,可以拆下就的封闭壳700并将新的封闭壳700安装在帽檐下,即可以完成更新或维修工作,由此,与将整个安全帽替代相比,提高了维修和更新的便利性并节省了更新或维修成本。
电池仓800设置在安全帽的帽壳100的后部,以平衡前部封闭壳700的重量。电池(未示出),优选地可再充电电池以及相应的充电电路和充电保护电路设置在该电池仓800内并通过例如导线连接到封闭壳700内的电子器件和控制电路等上,以为后者供电。在一个实施例中,该电池可以为锂离子电池,并且可以通过USB接口充电;可替代的是,该电池可以为锂离子电池,并且可以无线充电,在无线充电的情况下,电池仓800内还包括相应的感应线圈等,以通过感应给电池充电。
下面,参照图2至图7,详细描述根据本申请的摄像头组件。其中,图2示出了根据本公开的智能安全帽的封闭壳的分解视图;图3是示出摄像头组件的透视图;图4是示出下壳的外部透视图;图5是示出摄像头组件和光机组件的透视图;图6是示出摄像头的透视图;以及图7是示出摄像头组件安装在下壳内部的透视图。
如图2至7所示,封闭壳700包括上壳710和下壳720,上壳710和下壳720可以拼合在一起,并且上壳710和下壳720之间可以设置密封胶圈730,以使得拼合后的上壳710和下壳720构成一个密封的中空空间。在下壳720的下侧上形成凹陷721,光机组件900通过旋转结构910可旋转地设置在该凹陷721中。在下壳的左右方向的大致中间位置,形成两个窗口,第一窗口741和第二窗口742,例如,如图所示,第一窗口741为圆形,第二窗口742为跑道形,但是也可以采用其他形状,在此没有限制。相对应形状的镜片743和744例如通过粘结剂粘结到窗口上,以封闭第一窗口741和第二窗口742。镜片743和744可以采用玻璃、树脂等材料制成,可以是平面镜,但是也可以采用透镜,以根据需要调整入射光,使得摄像头更好地取像。
在封闭壳700的内侧,设置摄像头组件1000,该摄像头组件1000包括支架1100;安装在支架1100上的第一摄像头1200和第二摄像头1300;以及安装在支架1100上的闪光灯板1400,在该闪光灯板1400上设置有闪光灯1401、光照传感器1402和麦克风1403。
第一摄像头1200和第二摄像头1300在支架1100上安装成指向不同的方向,例如,第一摄像头1200指向远景方向并优选地包括远射镜头,第二摄像头1200指向前下方,主要是获取佩戴者的身前的图像,优选地包括广角镜头,如图7所示,摄像头组件1000例如通过螺钉(未示出)固定在下壳720内侧预先设定的支柱上,使得第一摄像头1200对准第一窗口741,第二摄像头1300对准第二窗口742,并且闪光灯1401和光照传感器1402也对准跑道形的第二窗口742,以便获取外界光照信息和利用闪光灯为摄像头的拍摄补光。
如图7所示,承载控制电路的电路板1500设置在支架1100的上侧,盖住支架1100。由此,两个摄像头分别通过柔性扁平电缆1201和1301连接到电路板1500的连接器1501和1502上,以将拍摄的图像传送给电路板上承载的控制电路并且接收控制电路的控制信号和电源信号。
图4示出了下壳下侧的外部视图,其中,光机900收纳在凹陷721中。在摄像头的右侧,下壳720上还设置有操作按钮722,以接收用户的操作指令。优选地是,每个操作按钮具有不同的形状或者每个操作按钮的按压表面上设置不同的凸起和/或凹坑,以便于佩戴者盲按并防止误操作。
图5示出了在安装状态下摄像头组件与光机的位置关系,其中省略了下壳以便更清楚地显示,在该图中,光机组件900处于收纳位置,位于摄像头组件的一侧,在摄像头组件1000的另一侧为闪光灯板1400和电路板1500。闪光灯板1400上设置有闪光灯1401和光照传感器1402,以便在光照不足的情况下,闪光灯1401开启为摄像头补光。在闪光灯板1400上还设置有麦克风1403,以获取外界的声音和佩戴者的语音信息,并且将获取的语音信息传输到电路板上设置的控制电路,以进行语音识别。
图6示出了摄像头组件和闪光灯板的透视图,在支架1100上设置有弹性卡子1101和1102,闪光灯板1400通过该弹性卡子1101和1102卡接在支架1100上,由此将摄像头组件和闪光灯板拼合成一个组件,便于安装和维护。
在封闭壳700内还可以设置扬声器(未示出),以向佩戴者输出声音信息,该声音信息包括声音指令、提醒声音、报警声音等,或者可以是在利用智能安全帽进行语音/视频通话时向佩戴者提供对方的声音。另外,还可以设置USB插口、耳机插口(未标识)、NFC读卡器、指纹输入单元等中的一个或多个,以方便与外围设备通信和实现相应的功能。
控制电路(未标识)设置在电路板1500上,例如,包括处理单元、存储单元、通信单元、I/O接口单元等。处理单元例如可以包括微处理器、通用处理器或专用处理器等,并且也可以包括分立元件构成的处理电路。存储单元可以存储由处理单元执行的程序、执行程序所需的数据、由麦克风、摄像头、传感器等采集的数据等信息。通信单元例如可以在5G网络、Wifi、蓝牙、第四代无线通信协议等协议下与远程控制中心、其他智能安全帽、工程机械的控制单元等通信,以交换信息以及语音/视频通话。在一个实施例中,工程机械中设置的控制单元可以采集表示工程机械的工作状况的信息,并将给信息发送给智能安全帽的控制电路,该控制电路可以接收该信息并且处理该信息。
如图8和9所示,智能安全帽1的两个摄像头1200和1300可以获取不同场景的图像,例如,第一摄像头1200可以获得佩戴者前方A范围内的第一图像,而第二摄像头1300可以获得佩戴者前下方B范围内的第二图像。由此,从图9的示例中可以看出,在机手佩戴安全帽操作挖掘机的过程中,通过第一摄像头1200可以获得挖掘机的挖斗的图像,同时通过第二摄像头1300获得机手的手部的动作的图像。
下面,简要描述根据本公开内容的智能安全帽的一种可选的工作方式,要指出的是,下面的描述是以操作工程机械,例如挖掘机的机手为例进行描述,但是本公开并不局限于此,而是可以应用于其他类似的场景。
在机手佩戴上根据本公开的智能安全帽1时,可以通过例如NFC卡等方式或者通过面部识别、指纹识别、语音识别等各种识别方式中的至少一种确定机手的身份;
在机手起动工程机械,例如挖掘机之后,智能安全帽1例如通过配对与工程机械上安装的控制单元连接,并且接收工程机械上的控制单元发送的识别信息,以识别工程机械的唯一识别码或其他身份信息;
机手可以根据预先确定的工作内容操作挖掘机,或者机手的工作内容或作业清单可以通过远程控制中心或其他智能安全帽实时地发送给机手佩戴的智能安全帽,并显示在智能安全帽的光机900上,机手可以通过阅读光机给出的指令进行操作;
在机手操作过程中,第一摄像头1200将拍摄机手前方的图像,例如,该图像包括挖掘机的挖斗的动作,该动作例如包括挖掘机的挖斗铲出满斗,倾倒材料后的挖斗为空斗,或者挖掘机的挖斗仅铲出半斗,进行吊装或运送的动作,如吊管,换成其他作业末端的工作,例如,破碎等。在一个实施例中,也可以识别挖掘机的挖斗所针对的工作对象,例如,挖掘土方、砂石、石块等。同时,第二摄像头1300将拍摄机手前下方的图像,例如,该图像包括机手手部控制挖掘机的控制杆的操作动作,并且将第一摄像头1200和第二摄像头1300获取的图像同步传输到控制电路;
于此同时,控制电路通过所包括的通信单元与挖掘机的控制单元通信,以获取机手操作的同时挖掘机的操作参数,该操作参数可以包括例如挖掘机的瞬时油耗信息、挖掘机的泵油压力、挖掘机的发动机各项性能信息(水温,转速,扭矩),挖掘机的噪声等;
控制电路将获得的上述图像信息以及表示挖掘机的操作状态的参数信息传输到控制中心,控制中心将第一摄像头1200获得的挖斗的图像信息以及第二摄像机1300获得的机手操作控制杆的信息、以及表示挖掘机的操作状态的信息根据时间相关联,并且生成关系图,由此获得机手在进行给定任务时机手的操作时间、操作顺序、挖斗的动作顺序、挖掘机的油耗等的关联信息,进而得出不同个体机手的操作习惯,符合规范的操作与不符合规范的操作,是否符合产品设计的使用场景,根据操作状态的信息分析,对机手技能的评价指标。
在一个实施例中,第一摄像头1200和第二摄像头1300获得的第一图像和第二图像被分成多个帧,第一图像的图像帧与第二图像的图像帧基于时间相关联,并且第一图像的图像帧被识别,以确定挖掘机的挖斗的位置、挖斗内的材料填充情况、挖斗的角度等信息,第二图像的图像帧被识别,以确定机手的手部的位置;所述第一图像的图像帧被识别的信息被组合,以获得挖斗的运动轨迹,同时相关联地,在相同时间段的第二图像的图像帧中被识别的手部位置信息被组合以确定机手的手部的位置移动轨迹,并且根据时间将挖斗的运动轨迹与机手的手部的位置移动轨迹相关联。
在一个实施例中,表示挖掘机的操作状态的信息从挖掘机的控制单元获得,并且根据时间顺序与上述挖斗的运动轨迹以及机手的手部操作轨迹相关联,以获得映射图,并且根据该映射图评价机手的操作技能水平。
在一个实施例中,可以根据在确定时间段内机手处理的材料的量、工作的场景内容以及挖掘机的油耗来确定机手的操作技能水平,例如,在给定5分钟时间内,通过自动识别每次挖掘挖斗被填充的材料及数量(挖斗的工作效率信息)以及与此同时挖掘机的油耗来确定机手的操作技能水平,进一步地,可以将被评为高技能水平的机手的操作轨迹信息和挖斗的运动轨迹信息中的一个或二者作为基准,将其他机手、尤其是被评为低技能水平的机手的操作轨迹信息与该基准相比较,由此确定低技能水平的机手的操作问题,以提供改进培训。
在一个实施例中,根据对挖掘机的挖斗的工作对象进行识别,可以确定挖掘机正在进行的工作,例如,通过识别挖斗中的材料为石块、煤炭、或土方,来确定挖掘机的工作对象,并且将识别到的挖掘机的工作对象与预先设定的工作对象相比较,以确定机手或挖掘机的租赁方按照预先签订或授权的工作对象进行工作,并且可以在识别到的工作对象不同于预先授权的工作对象时,向控制中心发出报警信息并且/或者将该信息保存到挖掘机的工作日志中或保存到智能安全帽的工作日志中,以便日后调取。在进一步的实施例中,在控制中心收到该报警信息时,远程控制工程机械,如挖掘机自动停止工作。
在一个实施例中,可以将高技能水平的机手的操作轨迹信息作为指导信息通过智能安全帽上设置的光机提供给机手,由此使得机手在操作时可以根据该指导信息操作,由此改进或者培训低技能水平的机手。
在一个实施例中,可以将机手的操作信息、挖掘机的挖斗的运动轨迹信息、挖斗的工作效率信息与挖掘机的操作状况信息相关联,由此确定挖掘机的状况,例如,在相同或类似操作信息、类似挖斗工作效率情况下,如果挖掘机的油耗过高,则挖掘机有可能需要维护或保养。在另一个示例中,如果机手的操作轨迹信息类似,但是挖斗的运动轨迹以及挖掘机的油泵的油压出现异常,则表示挖掘机有可能需要维护或保养。从而可以对挖掘机的状况进行评估。
上述对图像的处理、识别和信息的处理可以在远程控制中心进行,也可以在智能安全帽上执行,或者可以部分在智能安全帽上执行,而部分在远程控制中心执行,本发明并不局限于此。另外,上述对图像的处理和识别可以通过机器学习利用人工智能识别,也可以通过部分由人工来完成部分由人工智能完成,本发明并不局限于此。
尽管上面以一个优选实施例详细描述了根据本公开的智能安全帽,但是,本领域技术人员能够理解到本发明并不局限于该具体结构,而是可以作出各种修改和变化。