一种基于散射效率的海面溢油光学检测设备
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于目标识别技术领域,具体涉及一种基于散射效率的海面溢油光学检测设备。
背景技术
随着海洋石油工业的发展,海上石油运输量急剧增加,海面溢油的风险也随着增加。一旦海上发生溢油事故,将对海洋环境甚至全球生态循环造成严重的影响。随着人们环保意识的增强,海上溢油事故备受关注,对海面溢油检测设备也提出了更高要求;如何合理、高效地提高检测精度,对溢油区域进行定位,也成为专家们研究的课题。
目前海面溢油检测设备主要有图像和电磁波两种方式;这两种方式主要作用是通过采集信号建立相关的海面溢油反射模型,所建立的反射模型精度往往不能满足数据处理的需要,并且缺少对信号的分析能力,且不能精确定位。另外,海面环境复杂多变,部分区域漂浮的杂物种类较多,水藻、垃圾、动物等其他漂浮物都会影响基于图像和电磁波检测原理的海面溢油检测设备的检测精度和检测效率。为此,我们提出了一种能精确定位、高效检测的基于散射效率的海面溢油光学检测设备。
发明内容
本发明专利的目的是针对现有海面溢油检测设备所存在的不足,提出一种能精确定位、高效检测的海面溢油光学检测设备,该油海面溢油光学检测设备根据海面溢油与海面环境存在的散射偏振差别特性,可以精准地识别出海面溢油的特征信号,通过位置信号和角度信号的运算,可以得到坐标信息;该设备具有能精确定位、检测误差小、稳定性高、操作简单、测量效率高的特点。
为实现上述目的,本发明采用以下技术方案:
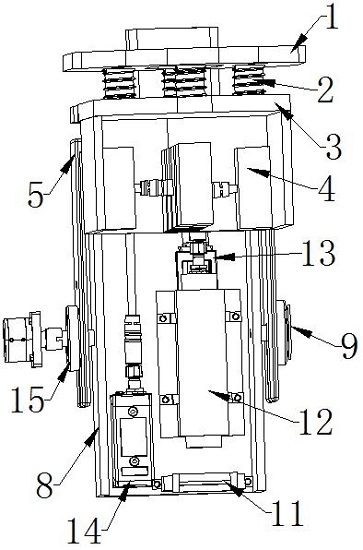
本发明提供一种基于散射效率的海面溢油光学检测设备,其特征在于包括:基座1,通过多个减震器2与基座1相连接的机架3,固定在机架3右端的用于处理信号的集成处理器模块4,可以360°旋转的径向旋转支架5,安装在径向旋转支架5上的用于测量径向旋转角度的径向角度检测仪6,安装在机架3上的给径向旋转支架5提供径向旋转动力的径向驱动装置7,可以180°旋转的轴向旋转支架8,安装在轴向旋转支架8上的用于测量轴向旋转角度的轴向角度检测仪9,安装在径向旋转支架5上的给轴向旋转支架8提供轴向旋转动力的轴向驱动装置10,用于产生散射现象的偏振探头11,基于散射效率检测原理的图像采集模块12,用于改变图像采集模块12检测距离的能上下运动的摄像驱动装置13,以及用于实时监测距离的激光测距仪14。
进一步的,径向旋转支架5的上端轴通过轴承15安装在机架3的左端,轴向旋转支架8的左右端轴通过两个轴承15安装在径向旋转支架5上;图像采集模块12安装在摄像驱动装置13的支撑板1301上;偏振探头11、摄像驱动装置13、激光测距仪14都安装在轴向旋转支架8上;图像采集模块12的图像采集方向、激光测距仪14的测距方向都与摄像驱动装置13上下运动方向平行,摄像驱动装置13上下运动方向与轴向旋转支架8的左右端轴垂直。
进一步的,图像采集模块12包括:镜头1201,工业相机1202,以及用于数据传输的光纤1203;所述镜头1201的第一表面与偏振探头11相连接;所述镜头1201的第二表面与工业相机1202相连接;所述工业相机1202通过光纤1203与集成处理器模块4电性连接。
进一步的,偏振探头11包括:偏振片1101,用于固定偏振片1101的圆弧刻度架1102,以及用于固定圆弧刻度架1102的电动码盘1103;所述偏振片1101与镜头1201平行;所述电动码盘1103的旋转角度为0~120°;所述偏振探头11与图像采集模块12相结合,用于采集各偏振角度下的光学图像。
进一步的,集成处理器模块4包括:数据采集卡401,用于接收位置信号的信号仪402,数据存储卡403,运算器404,控制器405,以及数据发射器406;所述径向角度检测仪6、轴向角度检测仪9、激光测距仪14、信号仪402、数据存储卡403都与数据采集卡401电性连接;所述数据存储卡403与运算器403相配合;所述控制器405、数据发射器406都与运算器404电性连接;所述径向驱动装置7、轴向驱动装置10、摄像驱动装置13、、电动码盘1103都与控制器405电性连接。
进一步的,集成处理器模块4同时对位置信号、径向旋转角度信息、轴向旋转角度信息和光学图像完成采集、存储、运算过程,得到的光学图像和光学图像的空间位置信息通过数据发射器406完成数据的发射传输过程。
本发明的优点在于。
本发明的设备具有能精确定位、检测误差小、稳定性高、操作简单、测量效率高的特点;根据海面溢油与海面环境存在的散射偏振差别特性,通过电动码盘1103的转动带动偏振片1101在圆弧刻度架1102上完成0~120°角度的转动,能发生多角度的散射现象,通过图像采集模块12有效的采集各个角度的散射图像,能充分识别目标的散射偏振特性、有效的减小检测误差;通过径向旋转支架5的360°旋转、轴向旋转支架8的180°旋转和摄像驱动装置13的上下运动相结合,能提高测量效率、增大检测范围;通过集成处理器模块4对位置信号、径向旋转角度信息、轴向旋转角度信息的运算,能有效的对检测目标进行精确定位。
附图说明
图1是本发明的海面溢油光学检测设备主视图。
图2是本发明的海面溢油光学检测设备结构示意图。
图3是本发明的海面溢油光学检测设备另一较佳视角结构示意图。
图4是本发明的图像采集模块结构示意图。
图中,1-基座,2-减震器,3-机架,4-集成处理器模块,5-径向旋转支架,6-径向角度检测仪,7-径向驱动装置,8-轴向旋转支架,9-轴向角度检测仪,10-轴向驱动装置,11-偏振探头,12-图像采集模块,13-摄像驱动装置,14-激光测距仪,15-轴承,401-数据采集卡,402-信号仪,403-数据存储卡,404-运算器,405-控制器,406-数据发射器,1101-偏振片,1102-圆弧刻度架,1103-电动码盘,1201-镜头,1202-工业相机,1203-光纤。
具体实施方式
下面结合附图和具体实施方式,对本发明做进一步的详细说明。
实施例参照附图1-4所示,一种基于散射效率的海面溢油光学检测设备,包括:基座1,通过多个减震器2与基座1相连接的机架3,固定在机架3右端的用于处理信号的集成处理器模块4,可以360°旋转的径向旋转支架5,安装在径向旋转支架5上的用于测量径向旋转角度的径向角度检测仪6,安装在机架3上的给径向旋转支架5提供径向旋转动力的径向驱动装置7,可以180°旋转的轴向旋转支架8,安装在轴向旋转支架8上的用于测量轴向旋转角度的轴向角度检测仪9,安装在径向旋转支架5上的给轴向旋转支架8提供轴向旋转动力的轴向驱动装置10,用于产生散射现象的偏振探头11,基于散射效率检测原理的图像采集模块12,用于改变图像采集模块12检测距离的能上下运动的摄像驱动装置13,以及用于实时监测距离的激光测距仪14。
径向旋转支架5的上端轴通过轴承15安装在机架3的左端,轴向旋转支架8的左右端轴通过两个轴承15安装在径向旋转支架5上;图像采集模块12安装在摄像驱动装置13的支撑板1301上;偏振探头11、摄像驱动装置13、激光测距仪14都安装在轴向旋转支架8上;图像采集模块12的图像采集方向、激光测距仪14的测距方向都与摄像驱动装置13上下运动方向平行,摄像驱动装置13上下运动方向与轴向旋转支架8的左右端轴垂直。
图像采集模块12包括:镜头1201,工业相机1202,以及用于数据传输的光纤1203;所述镜头1201的第一表面与偏振探头11相连接;所述镜头1201的第二表面与工业相机1202相连接;所述工业相机1202通过光纤1203与集成处理器模块4电性连接。
偏振探头11包括:偏振片1101,用于固定偏振片1101的圆弧刻度架1102,以及用于固定圆弧刻度架1102的电动码盘1103;所述偏振片1101与镜头1201平行;所述电动码盘1103的旋转角度为0~120°;所述偏振探头11与图像采集模块12相结合,用于采集各偏振角度下的光学图像。
集成处理器模块4包括:数据采集卡401,用于接收位置信号的信号仪402,数据存储卡403,运算器404,控制器405,以及数据发射器406;所述径向角度检测仪6、轴向角度检测仪9、激光测距仪14、信号仪402、数据存储卡403都与数据采集卡401电性连接;所述数据存储卡403与运算器403相配合;所述控制器405、数据发射器406都与运算器404电性连接;所述径向驱动装置7、轴向驱动装置10、摄像驱动装置13、、电动码盘1103都与控制器405电性连接。
集成处理器模块4同时对位置信号、径向旋转角度信息、轴向旋转角度信息和光学图像完成采集、存储、运算过程,得到的光学图像和光学图像的空间位置信息通过数据发射器406完成数据的发射传输过程。
本发明的具体工作过程一如下:
基座1与外部载体相连接,外部载体带动本发明的海面溢油光学检测设备移动;集成处理器模块4对激光测距仪14的实时监测距离信息进行采集、存储、运算,控制器405根据所述运算结果控制摄像驱动装置13的上下运动,进而带动图像采集模块12快速对海面溢油目标聚焦锁定;通过电动码盘1103的转动带动偏振片1101在圆弧刻度架1102上完成0~120°角度的转动,从而发生多角度的散射现象,通过图像采集模块12有效的采集各个角度的散射图像;控制器405同时控制径向驱动装置7、轴向驱动装置10的运动,从而带动径向旋转支架5、轴向旋转支架8的旋转;在海面溢油光学检测设备的移动、摄像驱动装置13的上下运动、径向旋转支架5和轴向旋转支架8的旋转配合下,实现对海面溢油目标的锁定,并采集海面溢油目标的多角度散射图像,实现对海面溢油目标的特征标定,集成处理器模块4实时的对信号仪402的位置信号、径向角度检测仪6的径向旋转角度信息、轴向角度检测仪9的轴向旋转角度信息和图像采集模块12的光学图像完成采集、存储、运算过程,得到的光学图像和光学图像的空间位置信息通过数据发射器406完成数据的发射传输过程。
本发明的具体工作过程二如下:
基座1与固定的外部载体相连接;电动码盘1103的转动带动偏振片1101在圆弧刻度架1102上完成0~120°角度的转动,从而发生多角度的散射现象,通过图像采集模块12有效的采集各个角度的散射图像;集成处理器模块4对激光测距仪14的实时监测距离信息进行采集、存储、运算,控制器405根据所述运算结果控制摄像驱动装置13的上下运动,进而带动图像采集模块12对待测范围快速聚焦;控制器405同时控制径向驱动装置7、轴向驱动装置10的运动,从而带动径向旋转支架5、轴向旋转支架8的旋转;在摄像驱动装置13的上下运动、径向旋转支架5和轴向旋转支架8的旋转配合下,实现对较大待测范围的光学图像采集;集成处理器模块4实时的对信号仪402的位置信号、径向角度检测仪6的径向旋转角度信息、轴向角度检测仪9的轴向旋转角度信息和图像采集模块12的光学图像完成采集、存储、运算过程,得到的光学图像和光学图像的空间位置信息通过数据发射器406完成数据的发射传输过程。
以上实施利用以说明本发明的技术方案而非限制,本领域技术人员应当理解,凡在本发明的精神和原则之内,对本发明的技术方案所做的任何修改、等同替换或改进等,均包含在本发明的保护范围内。