下颚前移系统
文献发布时间:2023-06-19 11:27:38
技术领域
本发明的实施例涉及下颚前移系统。
背景技术
通常,睡眠过程中,如果围绕气道的肌肉放松,则喉结、扁导体及舌头等会向后松弛下垂。因此,相比于清醒状态时气道虽然可能会略微变窄但是对于大部分人群而言不会带来问题。但是,部分人群在睡眠过程中由于气道变得过窄而阻挡空气通过气道,因此会产生打鼾(Snoring)及阻塞性睡眠呼吸暂停(Obstructive Sleep Apnea,OSA)。作为打鼾和阻塞性睡眠呼吸暂停的原因,包括如下颚小于正常人的情况、舌头或者扁导体大于正常人的情况、喉结长度松弛变长的情况的气道局部被堵塞的情况等。
出于缓解这种打鼾和阻塞性睡眠呼吸暂停的目的,正在使用各种口腔内装置及方法,例如包括利用下颚前移装置使变窄的气道变宽的方法。
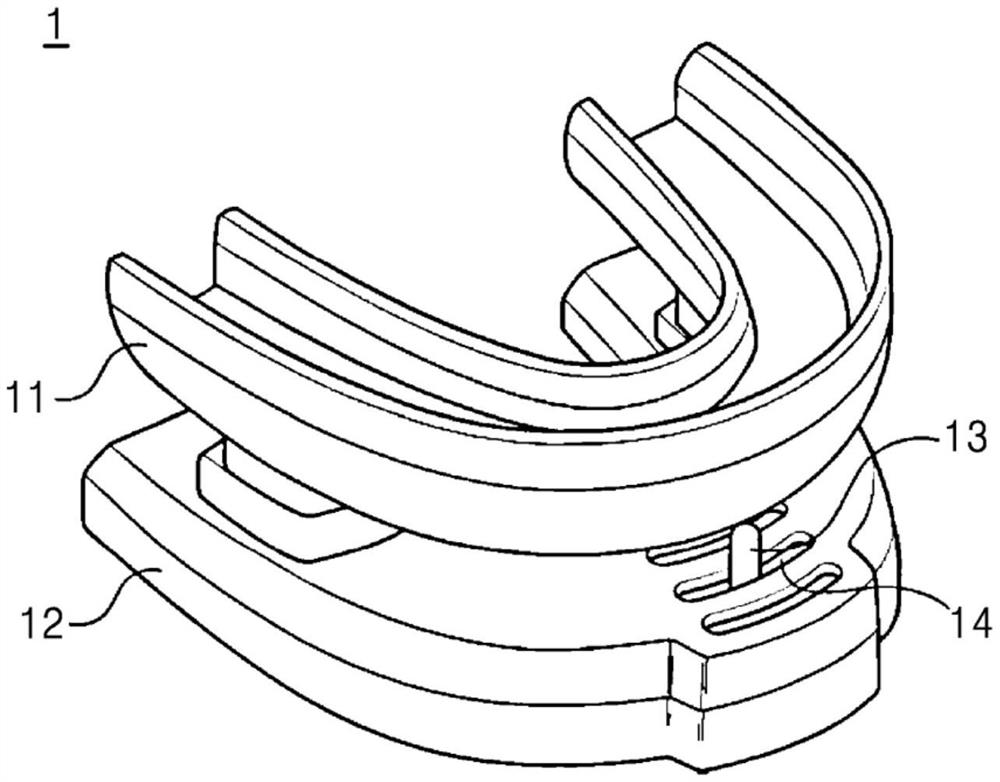
图1是根据现有技术的用于校正打鼾及睡眠呼吸暂停的牙科器具(DENTALAPPLIANCE FOR TREATMENT OF SNORING AND OBSTRUCTIVE SLEEP APNEA),所述下颚前移装置100为佩戴于患者口腔内的牙科器具以用于维护患者的上侧咽喉的气道,其具有与患者的上颚的齿列一致的上部部件11、与患者的下颚的齿列一致的下部部件12、延伸以牢固地连接到上部部件11和从上部部件11延伸的底表面的连接器13、以及彼此间隔开设置以与下部部件12平行的槽14。通过使连接器13选择性地插入槽14中任意一个,从而连接上部部件11与下部部件12,以使下部部件12相对于上部部件11位于比较突出的前方位置。
发明内容
技术问题
本发明的实施例旨在提供一种下颚前移系统,其为了感知在睡眠过程中打鼾及睡眠呼吸暂停的患者的睡眠姿势,利用睡眠姿势、呼吸音(气息声)、氧气饱和度以及人体的活动等来确定是否移动下颚前移装置。
技术方案
本发明的一实施例提供一种下颚前移系统,包括:上牙安置单元,其用于安置使用者的上牙;下牙安置单元,其用于安置所述使用者的下牙;驱动单元,其与所述上牙安置单元和所述下牙安置单元连接,且用于改变所述下牙安置单元相对于所述上牙安置单元的位置;感知单元,其感知所述使用者的生物信息;以及控制单元,其基于自所述感知单元接收的所述生物信息来控制所述驱动单元的操作;所述驱动单元布置于使用者的口腔外部。
有益效果
根据本发明的实施例的下颚前移系统通过感知睡眠过程中打鼾和睡眠呼吸暂停的患者的睡眠姿势,从而根据睡眠姿势提供是否移动下颚前移装置。此外,下颚前移系统通过将驱动单元布置于外部,从而可减少因佩戴下颚前移装置导致的疼痛且减少唾液分泌,并且可提供使下颚前移的充分的力。
附图说明
图1是图示根据现有技术的下颚前移装置的示图。
图2是图示根据本发明一实施例的网络环境的例子的示图。
图3是概略地显示根据本发明一实施例的下颚前移系统的方框图。
图4是图示根据本发明一实施例的下颚前移装置的立体图。
图5是用于说明图4的下颚前移装置的内部结构的示图。
图6是显示根据本发明一实施例的下颚前移装置的工作原理的示图。
图7是显示下颚前移装置的使用状态的示图。
图8是显示下颚前移系统的控制方法的流程图。
图9是本发明的利用另一驱动形态的下颚前移装置的上牙安置单元和下牙安置单元的分解立体图。
图10是显示图9的下颚前移装置的工作原理的示图。
图11是概略地显示驱动单元为空气泵型的示意图。
图12是概略地显示驱动单元为钢丝型时的示意图。
具体实施方式
本发明的一实施例提供一种下颚前移系统,包括:上牙安置单元,其用于安置使用者的上牙;下牙安置单元,其用于安置所述使用者的下牙;驱动单元,其与所述上牙安置单元和所述下牙安置单元连接,且用于改变所述下牙安置单元相对于所述上牙安置单元的位置;感知单元,其感知所述使用者的生物信息;以及控制单元,其基于自所述感知单元接收的所述生物信息来控制所述驱动单元的操作;所述驱动单元布置于使用者的口腔外部。
在本发明的一实施例中,还可包括本体单元,其具有相距所述上牙安置单元或者所述下牙安置单元预定距离地布置的一表面,且在内部容纳所述驱动单元。
在本发明的一实施例中,所述上牙安置单元和所述下牙安置单元可布置于所述本体单元的外部。
在本发明的一实施例中,所述感知单元可位于所述本体单元中。
在本发明的一实施例中,所述感知单元可包括呼吸传感器、氧气饱和度传感器及姿势传感器中的至少任意一个。
在本发明的一实施例中,所述控制单元可基于所述生物信息判断所述使用者的睡眠状态,并根据所述睡眠状态来控制所述驱动单元的操作。
在本发明的一实施例中,所述驱动单元可包括生成驱动力的动力单元及将由所述动力单元生成的驱动力传递至所述上牙安置单元或者所述下牙安置单元的动力传递单元。
在本发明的一实施例中,所述动力单元可包括可将空气注入到所述动力传递单元的泵,所述动力传递单元可包括用于容纳由所述泵注入的所述空气的气缸及通过所述注入的空气可在所述气缸内部移动的活塞。
在本发明的一实施例中,所述动力传递单元还可包括作为由所述泵注入的空气的通道的管道,所述感知单元可包括感知所述管道内压力的压力传感器。
在本发明的一实施例中,所述气缸可与所述下牙安置单元连接,而且所述活塞可与所述上牙安置单元连接。
在本发明的一实施例中,所述动力传递单元还可具有在所述活塞与所述气缸之间赋予恢复力的弹性部件。
前面所述以外的其他方面、特征、优点将通过以下附图、权利要求书及发明的详细内容变得更加清晰。
本发明可进行各种变形,而且可具有多种实施例,下面将特定实施例图示到附图中并进行详细说明。为了使本发明的效果、特征及实现它们的方法明确,请参照下面结合附图详细说明的实施例。但是本发明并不受限于以下记载的实施例,可以以各种形态实施。
下面参照附图详细说明本发明的实施例,参照附图进行说明时,相同或者对应的组成要素将赋予相同的附图标记,其重复说明部分将被省略。
在以下的实施例中,“第一”、“第二”等术语的使用目的是用于将一组成要素与另一组成要素区分而非用于限定。
在以下实施例中,如果前后文中对单数的表述没有做出明确的不同解释,则单数的表述包括复数。
在以下的实施例中,“包括”或者“具有”等术语是指存在说明书记载的特征或者组成要素,而非事先排除增加至少一个其他特征或者组成要素的可能性。
为了便于说明,附图中组成要素的尺寸可将放大或者缩小。例如,附图中图示的各组成要素的尺寸及厚度为了便于说明而随意地显示,因此本发明并非一定受限于附图中所图示的。
图2是图示根据本发明一实施例的网络环境的例子的示图,图3是概略地显示根据本发明一实施例的下颚前移系统10的方框图。
图2的网络环境可包括下颚前移装置100、使用者终端200、服务器400及通信网300。图2的网络环境作为一示例,并非用于将下颚前移装置100的数量或者使用者终端200的数量限定为与图2相同。
作为一实施例,使用图2的网络环境的下颚前移系统10的特征在于,在使用者佩戴下颚前移装置100进行睡眠的过程中感知使用者的生物信息,并根据通过利用所感知的生物信息判断的使用者的睡眠状态来移动下颚,从而以使用者定制的方式来缓解打鼾或者呼吸暂停症。此时,在根据本发明一实施例的下颚前移装置100中,驱动单元140布置于口腔的外部且布置于可携带的本体单元103的内部,从而无需另外与外部装置外连接即可使使用者在睡眠中佩戴,不仅增加了使用者的方便性,而且可准确地获取睡眠相关的生物信息。
参照图2和图3,佩戴下颚前移装置100可具有在使用者佩戴的状态下布置于口腔外部的本体单元103和布置于口腔的上牙安置单元110及下牙安置单元120,以在使用者佩戴的状态下根据睡眠状态来移动使用者的下颚。在下颚前移装置100中,驱动单元140布置于外部且驱动单元140和供电单元150布置于一个本体单元103内以形成一体,从而可最大化携带性和方便性。此外,下颚前移装置100可利用感知单元130感知使用者的生物信息,并通过通信网300可向使用者终端200或者服务器400提供所述生物信息。下面将对下颚前移装置100进行更加详细的说明。
使用者终端200可以是由计算机装置实现的固定式终端或者移动式终端。使用者终端200还可以是利用从下颚前移装置100接收的生物信息来执行控制下颚前移装置100功能的终端或者是将所述生物信息传递至服务器400的终端。使用者终端200例如包括智能手机(smartphone)、移动电话、导航器、计算机、笔记本电脑、用于数字广播的终端、个人数字助理(Personal Digital Assistants,PDA)、便携式多媒体播放器(Portable MultimediaPlayer,PMP)、平板电脑等。作为一例,使用者终端200可利用无线或者有线通信方式通过通信网300与其他使用者终端及/或服务器400进行通信。
对通信方式没有特别限制,通信网300不仅可以使用包括通信网(例如移动通信网、有线互联网、无线互联网、广播网)的通信方式,而且还可以包括设备之间的近距离通信方式。例如,通信网300可包括个域网(personal area network,PAN)、局域网(local areanetwork,LAN)、校域网(campus area network,CAN)、城域网(metropolitan areanetwork,MAN),广域网(wide area network,WAN)、宽带网络(broadband network,BBN)、互联网等网络中的任意至少一个的网络。此外,通信网300可包括具有总线网络、星型网络、环状网络、网状网络、星型-总线网络、树形或者分层(hierarchical)网络等的网络拓扑中的任意至少一个,但是不限于此。
服务器400可由通过通信网300与使用者终端200或者下颚前移装置100进行通信以提供指令、代码、文件、内容、服务等的计算机装置或者多个计算机装置来实现。
例如,服务器400可向通过通信网300连接的使用者终端200提供用于安装应用程序所需的文件。这种情况下,使用者终端200可利用由服务器400提供的文件安装应用程序。此外,使用者终端200根据其中包括的操作系统(Operating system,OS)及至少一个程序(例如浏览器或者安装的应用程序)的控制与服务器400连接并接收服务器400提供的服务或者内容。作为另一示例,服务器400设定用于收发数据的通信会话,并还可以通过所设定的通信会话来路由使用者终端200间的收发数据。
根据本发明一实施例的服务器400包括控制单元,因此,接收使用者的生物信息则基于生物信息来判断使用者的睡眠状态,并根据判断结果确定何时移动下颚或者将下颚移动多少,从而生成用于控制下颚前移装置100的驱动单元140的控制信号并可以将其提供给使用者终端200或者下颚前移装置100。此外,如果周期性地提供使用者的生物信息,则服务器400学习基于生物信息来判断使用者的睡眠状态的判别基准,而且基于判别基准来生成对应使用者睡眠状态的控制信号,并将其提供给使用者终端200或者下颚前移装置100之后,利用反馈的生物信息重新学习所述判别基准或者控制信号生成基准。
但是,本发明不限于此,实现所述功能的控制单元还可以布置于使用者终端200或者下颚前移装置100而不会布置于服务器400。此外,服务器400当然还可以基于深度学习来学习睡眠状态的判别基准和控制信号生成基准,并将判别基准和控制信号生成基准传递至下颚前移装置100或者使用者终端200,从而在下颚前移装置100或者使用者终端200直接判断使用者的睡眠状态并生成控制信号。只是,下面为了便于说明将以使用者终端200具有控制单元221的情况为主进行说明。
图4是图示根据本发明一实施例的下颚前移装置100的立体图,图5是用于说明图4的下颚前移装置100的内部结构的示图。
再参照图3、图4及图5,根据本发明一实施例的下颚前移系统10可包括上牙安置单元110、下牙安置单元120、感知单元130、驱动单元140及控制单元221。此时,作为一实施例,作为使用者佩戴装置的下颚前移装置100可具有上牙安置单元110、下牙安置单元120、感知单元130及驱动单元140,使用者终端200可具有控制单元221。
下颚前移装置100可具有上牙安置单元110、下牙安置单元120、感知单元130及驱动单元140,而且还可包括本体单元101、供电单元150及通信模块160。
上牙安置单元110可用于安置使用者的上牙。上牙安置单元110能够以可插入使用者上牙的形状形成。上牙安置单元110可根据使用者的齿列定制制造,以最小化安置上牙时的异物感或者不适感。上牙安置单元110佩戴于上牙时,可包住上牙并紧贴上牙。
下牙安置单元120可用于安置使用者的下牙。下牙安置单元120可根据使用者的齿列定制制造,以最小化安置下牙时的异物感或者不适感。下牙安置单元120佩戴于下牙时,可包住下牙并紧贴下牙。
驱动单元140与上牙安置单元110和下牙安置单元120连接,并且能够改变下牙安置单元120相对于上牙安置单元110的位置。驱动单元140可包括用于提供驱动力的动力单元141和将动力单元141生成的驱动力传递至上牙安置单元110或者下牙安置单元120的动力传递单元145。
动力单元141可采用用于生成驱动力的任何手段。例如,动力单元141可利用电机(motor)、致动器(actuator)及泵(pump)中的任意一种来生成驱动力。此外,动力单元141还可以利用电磁或者形状记忆合金来生成驱动力。
动力传递单元145可包括对应于所述动力单元141类型的传递手段。例如,作为一实施例,动力单元141为电机或致动器时,动力传递单元145可包括至少一个齿轮(gear)以传递由电机或者致动器生成的驱动力。此外,作为另一实施例,动力单元141为泵时,动力传递单元145可包括气缸和活塞以传递由泵生成的空气流动。在稍后部分将对根据另一实施例的驱动单元140进行说明。
另一方面,驱动单元140可布置于使用者口腔的外部。此时,驱动单元140能够以容纳于本体单元103内部的状态布置于口腔的外部。驱动单元140位于口腔的外部,因此能够解决因口腔内的空间有限导致构件的尺寸受到限制或者不能充分生成前移下颚的推力等问题。如果驱动单元140位于口腔外部,则能够自由地选择用于提供使下颚前移的推力的动力单元141,而且还能够自由地选择布置于动力传递单元145上的感知单元130等。随着选择的自由度增加显然能够提高感知单元130等的性能。此外,还可以减少使用者感受到的异物感,还可以将噪音减少至不妨碍睡眠的程度。
本体单元101形成下颚前移装置100的外观,而且可具有相距上牙安置单元110或者下牙安置单元120预定距离地布置的一表面A1。本体单元101的至少一表面A1可以是具有一定的曲率的曲面以在使用者佩戴下颚前移装置100时至少一表面A1与使用者的嘴部对应。一表面A1能够以具有与使用者脸部形状,具体地以与嘴部形状对应的曲率的形态制作。如图所示,本体单元101能够从整体上形成为曲线形态。换而言之,与所述一表面A1相对的另一表面也可以具有曲面,该曲面的曲率与一表面A1相同。
此外,本体单元101还可包括内部单独地容纳有动力传递单元145的突出本体单元103,所述动力传递单元145与布置于本体单元101的外部的上牙安置单元110和下牙安置单元120连接。突出本体单元103可实现在内部容纳动力传递单元145的功能的同时,还通过使所述一表面A1与使用者的口腔或者嘴唇相距预定的距离,从而可实现最小化因使用者的嘴唇或者皮肤与一表面A1接触导致不适感的功能。
另一方面,在本体单元101的一表面A1上可以形成有贯通孔105以确保感知单元130中氧饱和度传感器131的感知区域。贯通孔105可形成于突出本体单元103的上侧以在使用者佩戴下颚前移装置100时使贯通孔105能够靠近鼻子布置。
感知单元130可感知使用者的生物信息。感知单元130可包括各种传感器以感知用于确定使用者的睡眠与否、姿势、打鼾或者睡眠呼吸暂停等睡眠状态的生物信息。例如,感知单元130可包括呼吸传感器132、氧气饱和度传感器131及姿势传感器133和134中的至少任意一个。
呼吸传感器132可以是能够感知打鼾声音的声音传感器或者感知从鼻子或嘴吸入/排出的使用者呼吸的空气流动传感器。氧气饱和度传感器131可以是感知氧气饱和度的传感器。在此,呼吸传感器132和氧气饱和度传感器131可获取生物信息,所述生物信息用于确定使用者的打鼾或者睡眠呼吸暂停等睡眠状态。
姿势传感器133和134可以是感知生物信息的传感器,所述生物信息用于确定使用者的睡眠姿势。姿势传感器133和134也可由一个构件组成,但是如图所示,可通过在其他位置布置其他种类的传感器来获取生物信息。例如,姿势传感器133和134可包括三轴传感器133。三轴传感器133可以是感知偏航(yaw)轴、纵摇(pitch)轴及翻滚(roll)轴变动的传感器。三轴传感器133可包括陀螺仪传感器、加速度传感器及倾斜传感器中的至少一个。此外,本发明不限于此,显然可采用感知非三轴的变动的传感器。
所述感知单元130虽然可布置于口腔的内部或者外部,但是下面为了便于说明以布置于口腔外部的本体单元101上的情况为中心进行说明。所述生物信息可通过布置于本体单元101内部的第一通信模块160传递至使用者终端200。其中,通信模块160可包括能够与使用者终端200进行通信的通信手段,例如蓝牙(Bluetooth)、物联网(ZigBee)、医疗植入式通信服务(Medical Implant Communication Service,MISC)、近距离通信(Near FieldCommunication,NFC)等手段。
此外,本体单元101内部可布置有供电单元150。供电单元150可由替换式电池或者充电式电池组成。
由于具有所述结构的下颚前移装置100一体形成,因此具有使用者可以在睡眠过程中不受布线等干扰而能够进行自由的睡眠的特征。
另一方面,使用者终端200可包括存储器210、处理器220及第二通信模块260(参照图3)。
存储器210作为计算机可读取的记录媒体,可包括如RAM(random accessmemory)、ROM(read only memory)及磁盘驱动器的永久性大容量记录装置(permanentmass storage device)。此外,存储器210中可储存操作系统及至少一个程序代码(作为一例,使用于安装在使用者终端200并驱动的浏览器或者所述的应用程序等的代码)。在存储器210以外的其他计算机中利用驱动机构(drive mechanism)能够从可读记录媒体中装载所述软件构件。在所述其他计算机中可读记录媒体可以包括软盘驱动器、磁盘、磁带、DVD/CD-ROM驱动器、存储卡等计算机可读记录媒体。
另一实施例中,软件构件还可以通过非计算机可读记录媒体的第二通信模块260装载在存储器210中。例如,至少一个程序基于开发者或者用于分发应用程序的安装文件的文件分发系统(例如基于所述服务器400通过网络300提供的文件而安装的程序(例如所述应用程序))可装载在存储器210中。
处理器220可配置为通过执行基本的算术、逻辑以及输入输出运算,从而处理计算机程序指令。其中,‘处理器(processor)'例如可指内置于硬件中的数据处理装置,其具有物理结构化的电路以执行以程序中包含的代码或者指令的形式表示的功能。如上所述,作为内置于硬件中的数据处理装置的一例,其可包括微处理器(Microprocessor)、中央处理器(Central Processing Unit:CPU)、处理器内核(Processor Core)、多处理器(Multiprocessor)、专用集成电路(Application-Specific Integrated Circuit,ASIC)、现场可编程门阵列(Field Programmable Gate Array,FPGA)等处理装置,但是本发明的范围并不限于此。指令可通过存储器210或者第二通信模块260提供给处理器220。例如,处理器220可配置为根据存储器210等的记录装置中储存的程序代码来执行所接收的指令。处理器220可包括控制单元221。在稍后部分将对通过控制单元221移动使用者的下颚的方法进行说明。
虽未图示,使用者终端200还可包括输入输出接口。输入输出接口(未图示)可以是与输入输出装置连接的手段。例如,输入装置可包括如键盘或者鼠标等装置,而且输出装置可包括用于表示应用程序的通信会话的显示器等的装置。作为另一示例,输入输出接口(未图示)还可以是与将输入和输出功能整合为一体的装置如触屏连接的手段。
使用者终端200通过输入输出接口将睡眠过程中记录的使用者的睡眠状态信息显示到外部,从而可供使用者确认。
下面参照图6至图8将对通过根据本发明一实施例的下颚前移系统10来移动下颚的方法进行具体说明。
图6是显示根据本发明一实施例的下颚前移装置的工作原理的示图,图7是显示下颚前移装置的使用状态的示图,图8是显示下颚前移系统的控制方法的流程图。
参照图6至图8,控制单元221可基于感知单元130提供的生物信息(图8的S1)判断使用者的睡眠状态(S2),并根据睡眠状态控制驱动单元140的操作。更为具体地,控制单元221利用呼吸传感器132或者氧气饱和度传感器131感知的生物信息,首先可判断使用者是否进入实际睡眠。然后控制单元221利用姿势传感器133和134提供的生物信息判断使用者的睡眠姿势。
其中,睡眠姿势是指使用者在睡眠中身体全部活动的姿势,更为具体地,睡眠姿势可指在重力空间内使气道的内部结构相对发生变化的头部姿势。换而言之,睡眠过程中即使使用者的身体(body)保持正确的姿势或者侧卧,使用者的头部也不会单纯地顺从所述姿势,而根据不同的使用者还可能向身体的反方向倾斜或者后仰。这种情况下,即使使用者的身体保持正确的姿势,也会因头部倾斜导致不能确保作为呼吸通道的气道空间,从而可发生打鼾或者睡眠呼吸暂停。根据本发明一实施例的下颚前移系统可通过布置于本体单元103的姿势传感器133和134将使用者的身体(body)的活动及与呼吸直接关联的使用者的头部活动感知为睡眠姿势,并与所述睡眠姿势对应地移动下颚。
睡眠姿势可至少包括第一睡眠姿势及不同于第一睡眠姿势的第二睡眠姿势。即,当判断是第一睡眠姿势时,可将下颚移动第一距离,当判断是第二睡眠姿势时,可移动不同于第一距离的第二距离。此时,第一距离和第二距离并非指向相同方向移动的距离,也可以是指向相互相反方向的距离。例如,睡眠姿势可包括仰卧位、侧卧位及背卧位中的至少两种,而且可包括如上所述的使用者的头部活动。此外,控制单元221还可根据使用者的睡眠障碍程度来感知特定的睡眠姿势。
如果睡眠时发生打鼾和睡眠呼吸暂停,则如图6的(a)所示,可移动下牙安置单元120以使下颚突出。如果控制单元221通过呼吸传感器132或者氧气饱和度传感器131感知的生物信息判定为打鼾或者睡眠呼吸暂停,则可驱动姿势传感器133和134。如上所述,根据不同的睡眠姿势,下颚的移动距离或者程度也会有所不同,如果控制单元221判定为打鼾或者睡眠呼吸暂停,则为了驱动姿势传感器133和134来判断睡眠姿势,可进一步获取必要的生物信息。
控制单元221可以感知仰卧位、侧卧位、背卧位及特定睡眠姿势,并根据睡眠姿势控制驱动单元140。例如,如图8所示,在S1步骤中,可感知佩戴下颚前移装置100的使用者的睡眠姿势。在S2步骤中,可通过位于下颚前移装置100的感知单元130来判断睡眠姿势。在S31步骤中,如果判断睡眠姿势为仰卧位,则可判断是否前移下颚。在S41步骤中,如果下颚处于前移的状态,则可以保持下颚前移。否则,在S42步骤中,可驱动驱动单元140使下颚前移。在S32步骤中,如果判断睡眠姿势为侧卧位或者背卧位,则可判断是否前移下颚。在S43步骤中,如果下颚为前移的状态,则可驱动驱动单元使下颚复位。在S44步骤中,如果下颚为复位状态,则下颚可保持复位状态。
更为具体地,如果控制单元221判断为仰卧位睡眠姿势(图8的S31),则驱动单元140通过动力单元141可前移下牙安置单元120(图8的S42)。在下牙安置单元120处于前移状态下,只要使用者的睡眠姿势不改变为侧卧位或者背卧位,就能够保持其前移状态(图8的S41)。前移的下牙安置单元120使咽喉附近的气道保持开放状态来扩张气道,从而能够使气道内的空气流动顺畅。因此,不同于现有的与睡眠姿势无关地前移下牙导致颚关节或者牙齿不适的情况,根据使用者的睡眠姿势可对下颚的前移与否进行不同处理。
即,如果佩戴下颚前移装置100的使用者将睡眠姿势从仰卧位姿势变为侧卧位或者背卧位姿势(图8的S32),则下牙安置单元120可相对于上牙安置单元110恢复到最初位置(图8的S43)。由此,使用者以侧卧位或者背卧位睡眠姿势进行睡眠时,将对下牙安置单元120或者上牙安置单元110不施加外力,因此可缓解使用者颚关节的疼痛。
下颚前移装置100被驱动时,下牙安置单元120有可能并非一直保持前移状态。即使姿势在一定时间以上不变,也会以一定的时间间隔后移下颚。这是因为处于睡眠期间,当下颚一直保持前移状态时会增加使用者的疲劳感及痛苦。所述一定的时间间隔可以是使用者预先设定的时间。或者,一定的时间间隔还可以是通过控制单元221学习使用者的睡眠状态并推导出的结果值。或者,也可以是预先输入的值,所述预先输入的值是提供本发明实施例的下颚前移系统10的供应商为了使使用者所受的压力最小化而设定的时间。即,使用者处于睡眠期间可以一定的时间间隔后移下牙安置单元120,从而有助于使用者睡眠。
另一方面,即使睡眠姿势采取侧卧位,根据使用者的身体状态也会出现打鼾严重的现象。这种情况下,可通过呼吸传感器132感知的打鼾声来前移下颚。即,也可以通过规定各传感器间的优先顺序来判断是否前移下颚,也可以通过综合考虑各传感器感知的信息来判断是否前移下颚。下颚前移装置100的驱动条件还可根据使用者的需要预先设定,还可以随意地修改使用,或者基于深度学习所得的学习模型来确定。因此,不统一适用于所有的人,而可以对每个人进行最优化并使用。
下面将对本发明的利用另一驱动形态的下颚前移装置100进行说明。
图9是本发明的利用另一驱动形态的下颚前移装置的上牙安置单元和下牙安置单元的分解立体图,图10是显示图9的下颚前移装置的工作原理的示图。图11是概略地显示驱动单元为空气泵型的示意图,图12是概略地显示驱动单元为钢丝型时的示意图。
参照图9至图12,驱动单元140的动力单元141包括可将空气向动力传递单元145注入的泵,动力传递单元145可包括用于容纳由泵注入的空气的气缸122及通过所述注入的空气可在气缸122内部移动的活塞113。
更为具体地,上牙安置单元110可通过活塞杆111与活塞113连成一体。如上所述,活塞杆111的一端可连接有上牙安置单元110,活塞113的一端可连接有密封部件114。密封部件114可以是由橡胶材料形成的盖子。
另一方面,动力传递单元145还可具有在活塞113与气缸122之间赋予恢复力的弹性部件112。例如,弹性部件112可以是弹簧,活塞杆111的形状以能够固定弹性部件112的形式形成。连接于上牙安置单元110的活塞113基于动力单元141提供的力可防止上牙安置单元110移动。即,可起到固定口腔的上侧的作用,而且可起到能够使口腔的下侧前移的支撑架的作用。
下牙安置单元120可与气缸122连成一体。气缸122基于动力单元141提供的力可使下牙安置单元120前移。气缸122前移的同时可挤压布置于活塞杆111外部的弹性部件112。弹性部件112通过压缩可起到提供恢复力的作用,以使气缸122向中立的位置移动。因此,如果解除由动力单元141提供的力,则被压缩的弹性部件112向原有状态恢复的同时可使气缸122移动到中立位置。
对于空气泵型,动力传递单元145可包括作为由泵注入的空气的通道的管道147。管道147通过由动力单元141提供的力可使空气移动至气缸122。通过管道147可向气缸122内注入空气。此外,在下牙安置单元120前移的状态下,只有当气缸122内部注入的空气被去除时才能移动至中立位置,因此可在管道147布置阀门143。通过阀门143可调节流向管道147内的空气压力。
此外,当下颚前移装置100为空气泵型时,下颚前移装置100还可包括用于感知管道147内的空气压力的压力传感器(未图示)。对于空气泵型,随着动力单元141被驱动,管道147内的空气压力会增加,随着空气压力的增加,气缸122内部将流入大量的空气,随着气缸122内部流入大量的空气,气缸122可向前移动更多。因此,可向控制单元221发送信号,从而通过在管道147布置压力传感器来适当地调节管道内的压力。即,当管道147内的压力上升至足以使下颚前移所需的量时,可停止动力单元141的工作,并使管道147内的压力保持一定。此外,当通过呼吸传感器132等确认到打鼾减小或者下颚有必要恢复原位时,控制单元221打开阀门143并可使管道147内的压力下降。
另一方面,空气泵型可以以如下顺序操作。只是,并非仅以如下的顺序操作,在普通技术人员容易实施的范围内,各顺序之间还可适当地包括必要的步骤。
首先,驱动单元140工作。驱动单元140工作是指通过向动力单元141供给电源来提升管道147内的空气压力。随着空气压力的上升,可向气缸122内部注入空气。随着空气的注入,内部空间由于气缸122内部压力会膨胀。此时,压力作用于除了注入空气的注入口部分以外的所有方向。附着有密封部件114的活塞113上连接的上牙安置单元110可执行支撑整个牙齿的功能。由此,下牙安置单元120可相对于上牙安置单元110前移。下牙安置单元120前移的同时可压缩弹性部件112。为了使下颚重新回到中立位置,需要打开阀门143以使空气排出,从而可降低气缸122内部的压力。随着气缸122内部的压力下降,弹性部件112的恢复力发挥作用,从而可以使气缸122和下牙安置单元120移动至中立位置。
如图12所示,当驱动单元140为钢丝型时,动力传递单元145可包括钢丝148而非管道147。通过钢丝148可连接动力单元141与气缸122。对于钢丝型,驱动单元140的动力单元141可以是步进电机。动力传递单元145可包括钢丝148。如果感知单元130感知生物信息并向控制单元221发送信号,则当仰卧位姿势等需要前移下颚时,钢丝148可移向动力单元141一侧。相反地,当侧卧位等需要下颚重新移动至中立位置时,钢丝可移向使用者一侧。
动力单元141可推动钢丝148使下颚恢复原状态,但是并非受限于此,还可以通过在上牙安置单元110设置弹性部件112来提供恢复力。
如上所述,根据本发明的实施例的下颚前移系统通过感知睡眠过程中打鼾和睡眠呼吸暂停患者的睡眠姿势,并根据睡眠姿势提供是否移动下颚前移装置。此外,下颚前移系统通过将驱动单元布置于外部,从而可减少因佩戴下颚前移装置导致的疼痛及减少唾液分泌,而且可提供充分的推力以使下颚前移。
如上所述,本发明参照附图中图示的一实施例进行了说明,这只是示例性的,对于本技术领域具有通常知识的人而言,应该能够理解基于此可进行各种变形及实施例的变形。因此,本公开的实质技术保护范围应取决于附上的权利要求书的技术思想。
工业实用性
根据本发明的一实施例,提供一种使下颚前移的下颚前移系统。此外,本发明的实施例可适用于产业上用于改善睡眠呼吸暂停的技术等中。