视觉分频控制系统
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及视觉检测技术领域,具体为视觉分频控制系统。
背景技术
当今社会,随着计算机技术,人工智能等科学技术的出现和发展,以及研究的深入,工业生产中对自动化的要求也越来越高,视觉技术已被广泛引入产品检测行业,具备视觉的自动化机械能更快、更准、更灵活地完成产品的瑕疵检测,尺寸测量等。基于图像分析的视觉技术在产品瑕疵检测等相关应用中的主要作用是获取产品表面的图像,然后对图像进行分析,以检测产品表面的脏污、破损、褶皱、凹坑、划痕等缺陷,同时也可以计算出产品的尺寸数据。
在视觉设备扫描产品图像时,需要保证产品移动速度与视觉设备扫描速度一致,这样得到的图像才是真实的产品图像,否则图像会出现拉伸或者压缩甚至丢帧,而保证产品移速与视觉设备采集速度一致就需要使用编码器信号,其是将托载产品的移动机构的编码器信号传输至扫描设备中,即可实现两者的同步,但是现在市面上进行编码器信号传输的基本都是采集卡或者视觉设备中自带的采集模块,其只能捕获编码器传输的差分信号,却无法对信号进行处理和判断,如果出现编码器反转的情况,也就是移动机构在速度变化时产生反转脉冲信号,而视觉设备依旧会正常扫描,这样图像就会与实际不符合,从而影响设备的检测。
发明内容
针对上述问题,本发明提供了视觉分频控制系统,其可精确检测到编码器的正反转,通过检测到编码器运动的精确脉冲信号数量来控制视觉设备,从而保证视觉设备与产品运动机构的速度同步。
其技术方案是这样的:视觉分频控制系统,其特征在于,其包括:
所述信号采集模块,与编码器连接,用于获取所述编码器的输出信号;
所述信号控制模块,与所述信号采集模块连接,用于对所述编码器的输出信号进行处理,识别所述编码器的正反转状态以输出状态信号,并对编码器运动脉冲信号数量进行计数;所述分频输出模块,与所述信号控制模块、外接视觉设备均相连接,用于根据状态信号及编码器运动信号脉冲数量进行分频输出。
其进一步特征在于:
其还包括与所述信号控制模块均相连接的串口电路模块、输入输出显示模块,所述串口电路模块与上位机通讯连接,所述输入输出显示模块用于显示所述编码器正转、反转状态;
所述信号采集模块包括收发器U1、电阻R1、R2、电容C1;所述收发器U1采用型号AM26C32IDR收发芯片;所述电阻R1的一端接电源5V,所述电阻R1的另一端接所述收发器U1的4脚,所述收发器U1的8脚接地,所述收发器U1的12脚连接于所述电阻R2的一端,所述收发器U1的16脚与所述电容C1的一端、电阻R2的另一端均相连后接所述电源5V,所述电容C1的另一端接地;
所述信号控制模块包括控制器U2、电容C2;所述控制器U2采用型号STM32F405RGT6控制芯片;所述控制器U2的31脚与所述电容C2的一端相连后连接电源5V,所述电容C2的另一端接地,所述控制器U2的31脚14、42、12脚与所述收发器U1的3、5、11脚对应连接;
所述分频输出模块包括稳压器U3、电阻R3~R20、电容C3~C8、发光二极管LED1~LED5、二极管D1、D2、电感L1、三极管Q1~Q3;所述稳压器U3采用型号BD9876AEFJ-E2稳压芯片;所述电阻R3的一端经连接所述发光二极管LED1后接地,所述电阻R3的另一端与所述电阻R4、电容C3、C4、电感L1的一端均相连后接电源5V,所述电容C3、C4的另一端相连后接地,所述电感L1的另一端与所述二极管D1的负极、电容C6的一端均连接于所述稳压器U3的1脚,所述二极管D1的正极接地,所述电阻R4的另一端与所述电阻R5的一端、稳压器U3的4脚均相连接,所述电阻R5的另一端接地,所述稳压器U3的2、5、9脚均接地,所述电容C5的一端连接所述稳压器U3的3脚,所述电容C5的另一端经连接所述电阻R6后接地,所述电容C6的另一端连接于所述稳压器U3的7脚,所述电阻R7的一端与所述电容C7、C8的一端、二极管D2的负极、稳压器U3的6、8脚均相连接,所述二极管D2的正极连接电源24V,所述电容C7、C8的另一端相连后接地,所述电阻R7的另一端与所述电阻R8的一端连接,所述电阻R8的另一端与所述发光二极管LED2的正极连接,所述发光二极管LED2的负极接地;所述电阻R9、R10的一端均连接于所述三极管Q1的集电极,所述电阻R9的另一端连接所述发光二极管LED3的正极,所述电阻R10的另一端连接所述发光二极管LED3的负极,所述三极管Q1的基极与所述电阻R15、R16的一端均相连接,所述电阻R16的另一端与所述三极管Q1的发射极相连后接地,所述电阻R15的另一端接于所述控制器U2的15脚;所述电阻R11、R12的一端均连接于所述三极管Q2的集电极,所述电阻R11的另一端连接所述发光二极管LED4的正极,所述电阻R12的另一端连接所述发光二极管LED4的负极,所述三极管Q2的基极与所述电阻R17、R18的一端均相连接,所述电阻R18的另一端与所述三极管Q2的发射极相连后接地,所述电阻R17的另一端接于所述控制器U2的16脚;所述电阻R13、R14的一端均连接于所述三极管Q3的集电极,所述电阻R13的另一端连接所述发光二极管LED5的正极,所述电阻R14的另一端连接所述发光二极管LED5的负极,所述三极管Q3的基极与所述电阻R19、R20的一端均相连接,所述电阻R20的另一端与所述三极管Q3的发射极相连后接地,所述电阻R19的另一端接于所述控制器U2的17脚;
所述串口电路模块包括电容C9、C10、USB串口CN1、转换器U4;所述转换器U4采用型号CH340C转换芯片;所述转换器U4的4脚经连接所述电容C10后接地,所述转换器U4的1脚与所述电容C9的一端相连后接地,所述转换器U4的16脚与所述电容C9的另一端相连后接电源5V,所述转换器U4的2、3脚与所述控制器U2的52、53脚分别对应连接,所述USB串口CN1的4、5脚均接地,所述USB串口CN1的2、3脚与所述转换器U4的6、5脚分别对应连接;
所述输入输出显示模块包括发光二极管LED6~LED10、三极管Q4~Q8、电阻R21~R35;所述发光二极管LED6的正极接电源5V,所述电阻R21的一端连接所述发光二极管LED6的负极,所述电阻R21的另一端连接所述三极管Q4的集电极,所述三极管Q4的基极与所述电阻R22、R23的一端均相连接,所述电阻R23的另一端与所述三极管Q4的发射极相连后接地,所述电阻R22的另一端接于所述控制器U2的22脚;所述发光二极管LED7的正极接电源5V,所述电阻R24的一端连接所述发光二极管LED7的负极,所述电阻R24的另一端连接所述三极管Q5的集电极,所述三极管Q5的基极与所述电阻R25、R26的一端均相连接,所述电阻R26的另一端与所述三极管Q5的发射极相连后接地,所述电阻R25的另一端接于所述控制器U2的23脚;所述发光二极管LED8的正极接电源5V,所述电阻R27的一端连接所述发光二极管LED8的负极,所述电阻R27的另一端连接所述三极管Q6的集电极,所述三极管Q6的基极与所述电阻R28、R29的一端均相连接,所述电阻R29的另一端与所述三极管Q6的发射极相连后接地,所述电阻R28的另一端接于所述控制器U2的24脚;所述发光二极管LED9的正极接电源5V,所述电阻R30的一端连接所述发光二极管LED9的负极,所述电阻R30的另一端连接所述三极管Q7的集电极,所述三极管Q7的基极与所述电阻R31、R32的一端均相连接,所述电阻R32的另一端与所述三极管Q7的发射极相连后接地,所述电阻R31的另一端接于所述控制器U2的18脚;所述发光二极管LED10的正极接电源5V,所述电阻R33的一端连接所述发光二极管LED10的负极,所述电阻R33的另一端连接所述三极管Q8的集电极,所述三极管Q8的基极与所述电阻R34、R35的一端均相连接,所述电阻R35的另一端与所述三极管Q8的发射极相连后接地,所述电阻R34的另一端接于所述控制器U2的21脚。
本发明的有益效果是,其可通过信号控制模块精确地检测到编码器的正反转状态,并可以将获取的状态信号进行分频处理输出,以驱动外接视觉设备动作,从而能够保证视觉设备与产品运动机构的速度同步,具有较好的使用效果。
附图说明
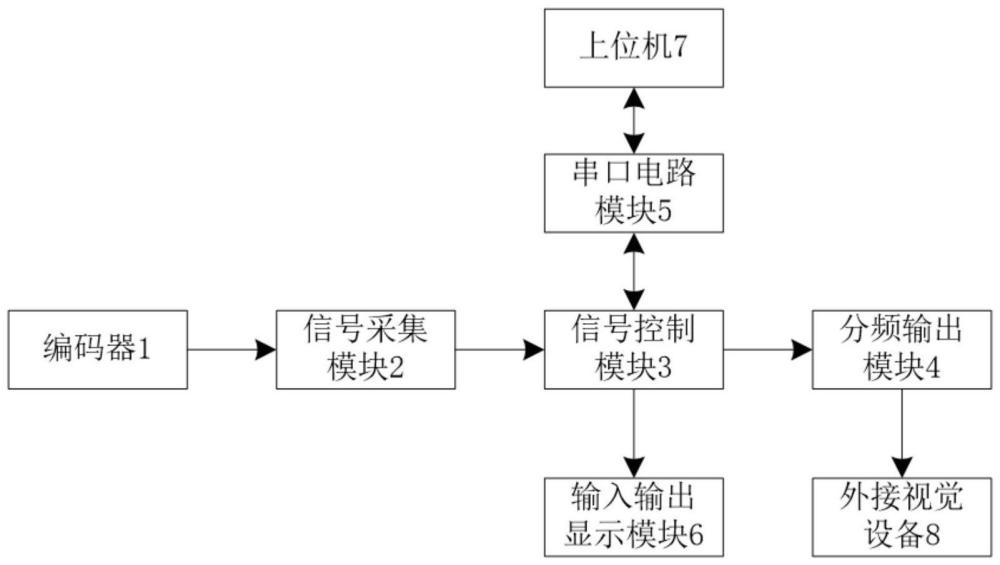
图1是本发明的结构示意图;
图2是本发明中信号采集模块的电路原理图;
图3是本发明中信号控制模块的电路原理图;
图4是本发明中分频输出模块的电路原理图;
图5是本发明中串口电路模块的电路原理图;
图6是本发明中输入输出显示模块的电路原理图。
具体实施方式
如图1~图6所示,本发明中视觉分频控制系统,包括:
信号采集模块2,与编码器1连接,用于获取编码器1的输出信号;
信号控制模块3,与信号采集模块2连接,用于对编码器1的输出信号进行处理,识别编码器1的正反转状态以输出状态信号,并对编码器运动脉冲信号数量进行精确计数;
分频输出模块4,与信号控制模块3、外接视觉设备8均相连接,用于根据状态信号及编码器运动信号脉冲数量进行分频输出,以驱动外接视觉设备8动作。
分频控制系统还包括与信号控制模块3均相连接的串口电路模块5、输入输出显示模块6,串口电路模块5与上位机7通讯连接,即上位机7通过USB串口与控制器U2进行通讯,可监控编码器1正反转状态,控制编码器1输出的差分信号,将信号分成三路输出,也就是可以分别单独控制三个外接视觉设备,可使得视觉设备与产品运动机构的速度同步;输入输出显示模块6是用于根据得到的信号将编码器1状态通过信号指示灯进行显示,如编码器1正转、反转状态及编码器1的脉冲信号显示。
信号采集模块2包括收发器U1、电阻R1、R2、电容C1;收发器U1采用型号AM26C32IDR收发芯片;电阻R1的一端接电源5V,电阻R1的另一端接收发器U1的4脚,收发器U1的8脚接地,收发器U1的12脚连接于电阻R2的一端,收发器U1的16脚与电容C1的一端、电阻R2的另一端均相连后接电源5V,电容C1的另一端接地;信号控制模块3包括控制器U2、电容C2;控制器U2采用型号STM32F405RGT6控制芯片;控制器U2的31脚与电容C2的一端相连后连接电源5V,电容C2的另一端接地,控制器U2的31脚14、42、12脚与收发器U1的3、5、11脚对应连接。
分频输出模块4包括稳压器U3、电阻R3~R20、电容C3~C8、发光二极管LED1~LED5、二极管D1、D2、电感L1、三极管Q1~Q3;稳压器U3采用型号BD9876AEFJ-E2稳压芯片;电阻R3的一端经连接发光二极管LED1后接地,电阻R3的另一端与电阻R4、电容C3、C4、电感L1的一端均相连后接电源5V,电容C3、C4的另一端相连后接地,电感L1的另一端与二极管D1的负极、电容C6的一端均连接于稳压器U3的1脚,二极管D1的正极接地,电阻R4的另一端与电阻R5的一端、稳压器U3的4脚均相连接,电阻R5的另一端接地,稳压器U3的2、5、9脚均接地,电容C5的一端连接稳压器U3的3脚,电容C5的另一端经连接电阻R6后接地,电容C6的另一端连接于稳压器U3的7脚,电阻R7的一端与电容C7、C8的一端、二极管D2的负极、稳压器U3的6、8脚均相连接,二极管D2的正极连接电源24V,电容C7、C8的另一端相连后接地,电阻R7的另一端与电阻R8的一端连接,电阻R8的另一端与发光二极管LED2的正极连接,发光二极管LED2的负极接地;电阻R9、R10的一端均连接于三极管Q1的集电极,电阻R9的另一端连接发光二极管LED3的正极,电阻R10的另一端连接发光二极管LED3的负极,三极管Q1的基极与电阻R15、R16的一端均相连接,电阻R16的另一端与三极管Q1的发射极相连后接地,电阻R15的另一端接于控制器U2的15脚;电阻R11、R12的一端均连接于三极管Q2的集电极,电阻R11的另一端连接发光二极管LED4的正极,电阻R12的另一端连接发光二极管LED4的负极,三极管Q2的基极与电阻R17、R18的一端均相连接,电阻R18的另一端与三极管Q2的发射极相连后接地,电阻R17的另一端接于控制器U2的16脚;电阻R13、R14的一端均连接于三极管Q3的集电极,电阻R13的另一端连接发光二极管LED5的正极,电阻R14的另一端连接发光二极管LED5的负极,三极管Q3的基极与电阻R19、R20的一端均相连接,电阻R20的另一端与三极管Q3的发射极相连后接地,电阻R19的另一端接于控制器U2的17脚。
串口电路模块5包括电容C9、C10、USB串口CN1、转换器U4;转换器U4采用型号CH340C转换芯片;转换器U4的4脚经连接电容C10后接地,转换器U4的1脚与电容C9的一端相连后接地,转换器U4的16脚与电容C9的另一端相连后接电源5V,转换器U4的2、3脚与控制器U2的52、53脚分别对应连接,USB串口CN1的4、5脚均接地,USB串口CN1的2、3脚与转换器U4的6、5脚分别对应连接。
输入输出显示模块6包括发光二极管LED6~LED10、三极管Q4~Q8、电阻R21~R35;发光二极管LED6的正极接电源5V,电阻R21的一端连接发光二极管LED6的负极,电阻R21的另一端连接三极管Q4的集电极,三极管Q4的基极与电阻R22、R23的一端均相连接,电阻R23的另一端与三极管Q4的发射极相连后接地,电阻R22的另一端接于控制器U2的22脚;发光二极管LED7的正极接电源5V,电阻R24的一端连接发光二极管LED7的负极,电阻R24的另一端连接三极管Q5的集电极,三极管Q5的基极与电阻R25、R26的一端均相连接,电阻R26的另一端与三极管Q5的发射极相连后接地,电阻R25的另一端接于控制器U2的23脚;发光二极管LED8的正极接电源5V,电阻R27的一端连接发光二极管LED8的负极,电阻R27的另一端连接三极管Q6的集电极,三极管Q6的基极与电阻R28、R29的一端均相连接,电阻R29的另一端与三极管Q6的发射极相连后接地,电阻R28的另一端接于控制器U2的24脚;发光二极管LED9的正极接电源5V,电阻R30的一端连接发光二极管LED9的负极,电阻R30的另一端连接三极管Q7的集电极,三极管Q7的基极与电阻R31、R32的一端均相连接,电阻R32的另一端与三极管Q7的发射极相连后接地,电阻R31的另一端接于控制器U2的18脚;发光二极管LED10的正极接电源5V,电阻R33的一端连接发光二极管LED10的负极,电阻R33的另一端连接三极管Q8的集电极,三极管Q8的基极与电阻R34、R35的一端均相连接,电阻R35的另一端与三极管Q8的发射极相连后接地,电阻R34的另一端接于控制器U2的21脚。
图2中,IN A+、IN A-、IN B+、IN B-、IN Z+、IN Z-分别作为编码器1的输入脉冲信号端;
图4中,OUT1-端、OUT2-端、OUT3-端作为分频输出模块4的三路分频信号输出端;
图6中,LED Forward端作为编码器1的正转状态显示端;LED Rerverse端作为编码器1的反转状态显示端;LED AI端、LED BI端、LED ZI端作为编码器1的脉冲信号显示端。
本发明能精确地检测到编码器1的正反转,具有微秒级输入响应速度,搭配的上位机7软件能监测托载产品的移动机构中电机正反转状态及补偿脉冲数,本发明以设定分频三路控制信号为例,即分频输出模块4与三路外接视觉设备连接,如相机、光源等,也就是说当编码器1输出相应信号后,信号控制模块3在识别出编码器1的正反转状态后输出相应状态信号,分频输出模块4根据状态信号及编码器运动信号脉冲数量输出三路分频信号使得外接视觉设备进行相应动作,比如相机拍照或是光源发光等,具体可根据实际连接的设备而定。
其工作过程具体为:当托载产品的移动机构中电机运动时,信号采集模块2接收编码器A相、B相与Z相的差分输入信号,并对差分输入信号解差分得到A相和B相的脉冲,随后信号控制模块3以现有四分频算法对A、B两相的双边沿进行分析和计数,得到电机运动方向和脉冲行程,信号控制模块3根据当前的运动方向、正反转的脉冲计数以及用户设定的模式、分频数等参数,输出相应状态信号,分频输出模块4根据状态信号给外接视觉设备输出分频信号,以驱动外接视觉设备进行动作,从而能够实现根据编码器1的状态,保证视觉设备与产品运动机构的速度同步。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。