高性能鞋床及其制造方法
文献发布时间:2023-06-19 09:29:07
相关申请的交叉引用
本申请要求2018年5月29日提交的美国临时申请序列第62/677,582号和2018年10月12日提交的美国非临时申请序列第16158395号的优先权,其内容通过引用全部结合于此,如同在此完全阐述的。
技术领域
本公开总体上涉及一种鞋床,该鞋床在鞋类中使用并且与包括休闲鞋、正装鞋、工作鞋和运动鞋在内的所有类型的鞋类一起使用。更具体地,本公开涉及向较大部分人群提供优越的舒适性和性能的鞋床及该鞋床的制造方法。
背景技术
鞋床(footbeds)(通常也称为鞋垫或鞋内底)是在设计、形状、材料、成本和总体质量上具有较大变化的许多类型的鞋类的常见部件。为了使鞋床的设计适应鞋的设计、预期消费者(运动员、休闲的人等)和鞋类产品的价格点,在鞋类类别和鞋类品牌之间存在许多这种变化。
鞋床是鞋类的舒适性和功能的主要来源,这是因为鞋床与实现高负荷和压力的足部的跖面直接接触。通常,鞋床由相对薄(3.0-5.0mm)的泡沫层制成,该泡沫层的顶部是粘附到泡沫的薄聚酯织物(顶部覆盖物)。
鞋床通常是一块扁平的泡沫,其不能为足部提供足够的缓冲、减压和支撑。仅由廉价泡沫模制而成的鞋床将迅速破裂并发生压缩形变。这种压缩形变改变了鞋床的形状,并且使缓冲能力降低多达75%,从而影响了足部的总体舒适性和支撑性。另外,由于足部的形状和尺寸的变化,标准鞋内底提供较差的性能。
发明内容
在一些实例中,一种制造足部插入物(foot insert)的方法包括:选择样本受检者(patient)群体;将每个受检者的足部定位在距下中间位置(sub-talar neutralposition);收集每个受检者的至少一个足部的三维数据并将扫描结果放置在表示样本受检者群体的扫描结果集合中;基于每个受检者的优选鞋号将扫描结果集合分成多个组;通过使用对应点对(correspondence point pairs)使每个组内的扫描结果对准;从扫描结果中获得轮廓数据;将至少一个过滤器应用于扫描结果;对扫描结果求平均值;获得用于每个组的七个代表性测量值,这七个代表性测量值包括前足宽度、后足宽度、足弓高度、足弓长度、足跟到第一跖趾关节的头部的值、足跟到第五跖趾关节的头部的值和足部长度;以及基于这七个代表性测量值形成鞋内底。
附图说明
本文参考附图示出了本公开的装置和方法的多种实施方式,其中:
图1是鞋床组件的等距俯视图;
图2是鞋床组件的底部的仰视图;
图3A至图3E是示出了七个代表性测量值的位置的示意图;
图4是示出了回归分析的一个实例的说明性模型;
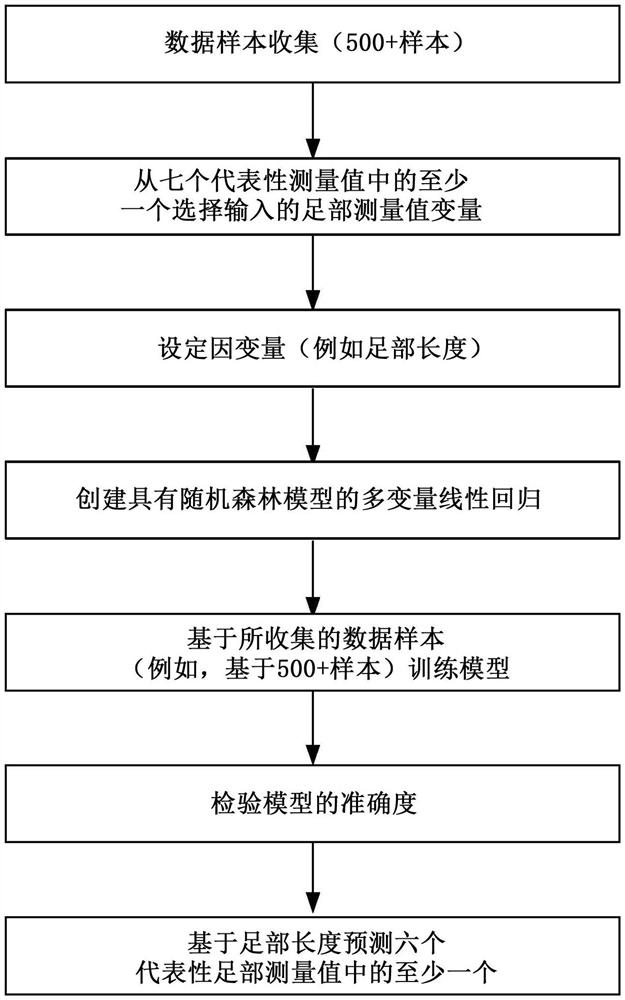
图5是示出了创建回归模型中的某些步骤的流程图;以及
图6是示出了可用于制造鞋内底的某些步骤的图示,这些步骤中包括可选的步骤。
现在将参考附图描述本发明的多种实施方式。应理解,这些附图仅描述了本发明的一些实施方式,因此不应被认为是对本发明范围的限制。
具体实施方式
尽管已经对鞋类及其制造方法进行了各种改进,但是传统的装置具有如上所述的一些缺点。
鞋床可以包括试图与足部的轮廓相匹配的顶部表面中的形状。这些鞋床可由较耐用的材料(诸如聚氨酯泡沫)制成,并且支撑结构由复合材料(诸如注射塑料和碳纤维)制成,从而保持鞋床形状。来自诸如Spenco Medical Corp.和Superfeet Worldwide的公司的鞋床是实例。
可使用更高质量的材料(包括更耐用、更硬且成形为匹配足部的材料)生产这种鞋床。应理解,使用更耐用、更高质量的材料将减少材料的破裂并保持鞋床的性能像新的一样。
然而,匹配足部的跖面的形状是复杂的过程。由于没有尝试匹配足部的跖面轮廓,所以具有扁平轮廓的鞋床不太有效,但是可用于人群中的大多数穿用者。相反,如果鞋床的特定几何形状不匹配特定穿用者的足部的几何形状,则具有匹配足部的曲率的鞋床可能是有问题的。这种几何形状的不匹配将产生不太理想的结果并可能产生伤害,并且可能还不如具有扁平轮廓的鞋床有效。如可以容易地理解的,在人群中存在数十亿的足部轮廓和形状。鞋床形状越具体,其越不可能适合大部分人群。
寻找用于大部分人群的鞋床几何形状的尝试是复杂且昂贵的任务。因此,许多负责设计鞋床的鞋类公司没有必要的设备或商业结构来投入必要的资源。在鞋类行业中,通常的做法是通过代表非常小的人群的足部数据来进行鞋床设计,并且希望获得最好的结果。虽然这可以解决暂时的商业需要,但是鞋床的性能通常不够理想。
因此,需要对形成鞋床的装置、系统和方法进行进一步改进。除了其他优点之外,本公开还可以解决这些需求中的一个或多个。
本文描述的用于鞋类的鞋床组件设计成提供优越的舒适性和支撑性。鞋床的形状和最终设计构造为适合大部分人群,并且提供舒适性和支撑性,特别是在最需要舒适性和支撑性的足部的足跟和中足区域中。
用于导出此优化公式的足部扫描数据集在曾经使用的最大数据集中,并且包括超过120000次的足部扫描结果。这个大的数据集和导出的算法确保几何形状将适合大部分人群,并且由该几何形状提供的舒适性和支撑性将是行业中最好的。
本文示出和描述的用于鞋类的鞋床组件提供了增强的缓冲、舒适性和支撑性。另外,该方法和设计提供了上述特征,同时在不改变鞋的合脚性的情况下适合一般生产的鞋类,鞋的合脚性是通过向鞋床增加较多的材料和体积而提供增强的特征的鞋床的售后中常见问题。
在一些实施方式中,鞋床10包括泡沫层20,该泡沫层延伸鞋床10的从脚趾到足跟的长度,其中刚性或半刚性的足跟板30附接到全长泡沫20,并且从鞋床10的后部部分延伸到中足R2中的一点,如图1和图2所示。中足R2点可以接近足部的第一跖骨头部和第五跖骨头部的位置。足跟板30所具有的几何形状设计为通过改进缓冲和减少足跖面上的压力来为足部的足跟和中足R2区域提供支撑性和舒适性。
该形状类似于足部的跖面的形状。足跟板30的刚性帮助保持几何形状。在鞋床10的前足R3和脚趾区域中,防滑材料50粘附到全长泡沫20的下部部分以增加泡沫的刚性,从而防止泡沫在使用期间起皱。另外,防滑材料50通过增加鞋床10和鞋的楦板之间的摩擦来防止鞋床10在鞋中向前滑动。理想地,足跟板30包括在足跟板的底部上的切口80,该切口允许全长泡沫伸出部70伸出穿过半刚性足跟板,使得泡沫与鞋的楦板接触,从而提供减震。另外,穿过足跟板的泡沫伸出部70将增加鞋的楦板和鞋床10之间的摩擦,从而提供额外的摩擦,并将有助于防止鞋床10在使用期间移动。在半刚性足跟板30接触楦板之前的装载期间,随着泡沫70的压缩,泡沫伸出部70还由于其顺应性提供额外的减震。
在图1和图2中示出了根据本公开的鞋床的一些部件,并且在整个说明书中可以使用以下术语来描述这些部件中的一些:
另外,在整个说明书中可以使用某些测量值来描述鞋床,这些测量值包括足跟杯深度、足跟杯直径、到足跟板前部的长度、足跟杯壁在内侧、外侧、后侧位置处的斜度/角度、足跟板切口形状(以吉他拨片的形状示出)、足跟板泡沫伸出部穿过吉他拨片孔伸出的距离、足弓高度、足弓弹性程度(arch spring)以及从足跟杯的底部到足弓的顶部的斜度。
如本文使用的,“鞋床长度”是指从足跟的后部到脚趾的前部的距离,“鞋床宽度”是指在前足的最宽点处的距离,“足跟宽度”是指在足跟的最宽点处的距离,“足跟板长度”是指从足跟板的后部到足跟板的前部的距离,“足跟板在足跟处的宽度”是指足跟板在足跟区域中的最宽点处的距离,“足跟板在足弓处的宽度”是指在足弓处从足跟板的内侧到足跟板的外侧的宽度,“前足厚度”是指在前足区域中的泡沫的厚度,“足跟杯壁高度(外侧、内侧、后侧)”是指从足跟杯壁的顶部到足跟的中心的垂直高度距离,“足跟杯壁角度(外侧、内侧、后侧)”是指足跟杯壁的从足跟的基部到壁的顶部的角度,“足弓高度”是指从足弓的顶部到足跟的基部的垂直高度,并且“从楦板开始的足弓弹性程度”是指从楦板到足弓的底部表面的距离。
鞋床基部20可以由弹性泡沫材料制成,该弹性泡沫材料通过诸如注射或压缩模制的技术制造,并且由例如泡沫聚氨酯或泡沫乙烯乙酸乙烯酯共聚物(EVA)的材料制成。也可以使用行业上已知的其他和较不常用的泡沫,例如泡沫橡胶或聚乙烯(PE)泡沫。泡沫的比重(SG)通常在0.15-0.40的范围内,其中材料硬度在Asker C级上在15和50之间。这些类型的泡沫在鞋类行业中是常见的,并且已知为穿用者提供优质的缓冲和舒适特性。贯穿鞋床10,鞋床基部20具有相对一致的厚度,其中在中足R2中具有较厚的区段以容纳足弓区域40,并且鞋床基部成形为与跖面匹配。足跟板30由比用于鞋床基部20的泡沫20更硬的材料制成,并且通常由经由注射或压缩模制技术生产的塑料材料制成。用于足跟板30的塑料可以包括尼龙、聚氨酯、EVA、聚碳酸酯和PEEBAX。这些塑料的比重在1.0-1.2的范围内,并且当用上述技术模制时,其肖氏A级硬度为50-90。也可以使用具有与上述塑料类似的物理特性的复合材料,例如碳纤维。
足跟板30在足跟区域R1中粘附到鞋床基部20的底部表面,并且防滑材料50在鞋床10的前足区域R3中粘附到鞋床基部20的底部表面。这些材料可以使用行业中已知的粘合剂或通过经由热和压力共同模制材料而彼此粘附,该热和压力有效地将每种材料的外层熔化到彼此。
足跟板30为鞋床10的主要形状提供了抵抗长期变形的材料和硬度。足跟板30使用行业中已知的标准粘合剂附接到鞋床基部泡沫20。在鞋床基部泡沫20粘附到足跟板30的情况下,泡沫呈现足跟板30的形状,并且因此具有最佳的几何形状以匹配跖面。足跟板从足跟中最远的点到中足R2中靠近足部的第一跖骨头部和第五跖骨头部的点而粘附并定位在鞋床基部20上,以确保足部的弯曲关节处的舒适性和顺应性。
提供鞋床10的主要形状的足跟板30的轮廓对于足部的舒适性和支撑性是关键的。在此形状内对鞋床10的功能来说重要的区域包括足跟杯深度、足跟杯直径、内侧足跟杯壁角度、外侧足跟杯壁角度、后侧足跟杯壁角度、内侧足跟杯壁高度、外侧足跟杯壁高度、后侧足跟杯壁高度、足弓高度和足弓弹性程度。
提供与足部的轮廓紧密匹配的几何形状将提供所需的支撑性和舒适性。应理解,匹配足部的轮廓将减小在足部的任何给定点处实现的压力。由于压力=力/表面积,并且施加在人的足部和鞋床的接合处的力对于个体而言是恒定的(主要由体重和步态类型决定),所以在恒定的力下增加接触表面积会减小压力。因此,匹配足部的轮廓在减小压力方面是重要的。压力是舒适性的主要贡献方面,这可通过任何人在赤脚踩到小物体(卵石)上而证明。该力是恒定的(体重、步态),但是在与小物体接触的点处的表面积显著减小。现在,该力(体重、步态)分布在小的表面积(卵石)上,压力急剧增加,从而出现不适(疼痛)。
另外,可以通过更好的鞋床几何形状来改进足部的支撑性和稳定性。支撑跖面的关键区域将帮助控制步态、减少足部内旋、提供足弓支撑并改进减震。例如,足跟杯壁高度和足跟杯壁角度支撑足跟的侧面并增加稳定性。对于足部和下肢而言,更稳定的足跟将产生更好的稳定性。足弓轮廓对于稳定性也是重要的,这是因为足弓轮廓支撑足部的内侧足弓。更好地支撑内侧足弓将增强稳定性并减少脚踝的内旋。这进而将增强身体的整个下肢的稳定性。熟悉人步态中的运动链的技术人员将理解,在足部处出现的不稳定性将沿运动链快速向上传播到下肢的其他关节(脚踝、膝部、臀部)处,迫使身体抵消不稳定的运动。
除了改进整体舒适性和支撑性,还可以经由鞋床几何结构来改进减震。应理解,足部和优化的鞋床10之间增加的接触表面积使得更多缓冲材料(鞋床基部20)发挥作用,因此更多的材料用于吸收步态的冲击力。随着接触表面积增加,更多缓冲材料有效地结合到减震反应中。
通过在足部的足弓中提供弹性部来实现足部的足弓中的额外的减震、舒适性和控制性。当与鞋床基部20结合时,足跟板30模制成使足跟板30的足弓区域的底部表面从鞋的楦板抬高的形状。这有效地在鞋床10的足弓区域中形成板簧构造。如可理解的,当施加力时,板簧允许足跟板30和鞋床基部20轻微地下陷,从而产生缓冲效果以及允许足弓适应特定穿用者的足部。
提供与足部轮廓匹配的形状有益于舒适性、支撑性和缓冲,但是这在为大多数人制造单一(非定制)产品时产生了挑战。给定人群中跖面的形状、尺寸和轮廓的大的变化意味着对于一个个体可能舒适的形状将在第二个个体中产生不适。因此,在设计鞋床时,需要从大的人群中获得的某些预定工程学形状,从而使用单一的制造形状来产生对大部分人具有最大效果的产品。根据本公开的鞋床的形状是从基于120000人的大的人群的计算和算法中导出的。产生一种可由大的人群使用的单一产品、同时提供良好的性能结果对用户有益,因为这降低了大量生产的产品的成本。此外,这种产品的生产降低了供应链的复杂性以及产品在零售和在线站点的展示性。
应理解,通过产生为个体的足部定制的形状,可以得到与穿用者的足部匹配的形状。通常称为矫正器的鞋床已经在医疗行业中使用了一段时间,并且通过采用穿用者的足部的定制模具来制造这种称为矫正器的鞋床。虽然定制矫正器可在舒适性和支撑性方面提供良好的效果,但是矫正器会带来时间和金钱上的成本。这些装置需要时间来定制穿用者的足部的模型,并且通常花费数百美元来制造。因此,这些装置通常是为具有严重足部健康问题的个体而准备的。
虽然鞋床基部20和足跟板30的组合将提供用于最佳鞋床形状的恰当的几何形状,但是应理解,本领域技术人员可使用不同的材料组合来形成类似的最佳形状。在本发明的第二实施方式中,鞋床10的关键的顶部形状可经由PU或EVA泡沫或类似聚合物的模制来生产。本领域技术人员可使用压缩模制、注射模制或敞口注模结合恰当的聚合物来将鞋床10模制成将提供舒适性、缓冲和支撑性的最佳形状,这个最佳形状考虑了诸如足跟杯深度、足跟杯直径、内侧足跟壁角度、外侧足跟壁角度、后侧足跟壁角度、内侧足跟壁高度、外侧足跟壁高度、后侧足跟壁高度、足弓高度和足弓弹性程度的参数。
测量值:表1示出了提供最佳舒适性和支撑性的鞋床10轮廓测量值。应理解,来自以下测量值中的每个的小变化可以是被允许的并且仍然实现期望的结果。下面的测量值描述了美国尺码9的鞋床。某些重要的测量值以星号开头。
表1:鞋床轮廓测量值
如上所述,上述测量值是针对设计用于9号鞋的鞋床10的。应理解,本领域技术人员可以基于行业标准尺寸分级和本算法使尺寸适应不同的鞋床尺寸。
为了生产用于鞋号的特定轮廓,该过程可以从数据收集开始。在数据收集过程中,使用3D扫描仪来扫描受试对象的足部。通过触诊距下关节(STJ)以确保中间位置(neutralposition)而使每个受试对象的足部都置于该中间位置。可以基于受试对象的鞋号将扫描的文件分成子集。
也可以从扫描结果中提取一维测量值,并且将受检者根据性别和活动水平分类。检查足跟到脚掌的长度和足部的宽度以确定运动员和非运动员之间是否存在差异。进行单向Anova分析以在控制一个或多个协变量的作用之后评估多个自变量对单个因变量之间的差异。例如,在一个分析中,通过足部类型和活动水平来比较平均足弓高度。控制变量是足跟到脚掌的长度和足部的宽度,具体地由于这些控制变量对因变量的已知影响来进行选择。
然后,可以基于对应的配对点来使扫描的文件对准。这些点是解剖学的,并且包括下面概述的七个关键的或“代表性”的解剖学点。这确保了所有文件在解剖学上对准。
从扫描的文件中提取3D轮廓,通过经由例如泊松过滤器的过滤器处理3D轮廓来使其平滑。从足底的3D足部扫描结果中保留平滑的网格。然后基于足跟到脚掌的长度和足部的宽度来处理和分析那些数据,以确定矫正插入物的形状和形状因数。
在一些实例中,可以对数据进行统计分析,例如F-检验。显着性的F检验将用于评价主要影响和相互作用的影响。F是组间方差(均方)除以组内方差(均方)。当F值大于1时,组间发生的方差比组内的方差大。当这种情况发生时,所计算的p值小,并且存在显著的关系。如果发现显著性,则原始组平均值和调节组平均值的比较可以提供关于协变量作用的信息。因为已知与因变量相关联的可预测方差从误差项中去除,所以ANCOVA增加了用于主要影响或相互作用的F检验的能力。本质上,其消除了因变量中的不期望的方差。评估方差的正态性和均一性的假设。正态性假定得分是正态分布的(对称的钟形),并且将使用一个样本Kolmogorov Smirnov(KS)检验来评估。方差的均一性假定两组具有相等的误差方差,并且将使用Levene检验进行评估。如果违反了正态性假设(歪斜的钟形),则将用Kruskal-Wallis H检验来评估p值。
从平滑的3D轮廓导出七个关键的解剖学测量值。这七个关键的解剖学测量值将在下文进行描述并且包括:
第一跖骨偏移值(或足跟到第一跖趾关节的头部的值):这是从足跟的后部到第一跖趾关节(第一MPJ)的中心的长度,如图3A所示。
第五跖骨偏移值(或足跟到第五跖趾关节的头部的值):这是从足跟的后部到第五跖趾关节(第五MPJ)的中心的长度,如图3A所示。
足跟宽度:足跟在其最宽点处的宽度,如图3B所示。
前足宽度:在前足的最宽点处的宽度;通常为从第一MP关节的内侧到第五MP关节的外侧的距离,如图3C所示。另外,前足宽度测量有助于确定所应用的鞋类是否具有足够的空间来适应前足的功能和组织膨胀。
足弓高度:内侧足弓在其最高点处的高度,如图3D所示。内侧足弓吸收来自腿部中的肌肉和地面的力并将这些力重新分布回足部和身体,使得我们能够流畅地移动。足弓的高度可以给我们一种如何产生、吸收和再吸收力的构思。正如跟骨一样,认为有几个因素影响足弓高度。
足弓长度:内侧足弓从它开始靠近足跟的位置并且向远侧延伸到恰好在前足中的第一MPJ附近的点的长度,如图3D所示。
足部长度:如从足跟的后部到最长脚趾测量的足部的长度,如图3E所示。最长脚趾通常是第一脚趾或第二脚趾。就支撑足部的足弓的宽度、围长和长度测量值而言,该测量值给我们提供了总足部尺寸的比值。
在一些实例中,这七个代表性测量值用于产生具有优越的配合性的插入物的轮廓形状。特别地,其中两个测量值使得产生的插入物优于本领域已知的其他插入物。具体地,第一跖骨长度测量值和第五跖骨长度测量值不是常用的,因为这些骨骼的长度存在太多的可变性。相反,支撑本公开的研究已经发现,那些特定骨骼的可变性与在鞋类测量期间未考虑的人体测量有很大关系。因此,插入物的算法和结构设计基于那两个骨骼的可变性来标准化和限定形状,这产生了提供对几乎每个足部都最佳配合的插入物,并且这是从基于足部的这两个特定部分的变化以及其他测量的计算中取得的。
实例1
在一个实例中,算法可以被理解为具有两个步骤。在第一步骤中,算法概述了如何使鞋床参数适合平均足部尺寸标准参数。在第二步骤中,算法将不同的鞋内底与其近似的鞋内底或(鞋楦底部)参数匹配。
本文描述的鞋床具体构造为在任何鞋内为任何足部尺寸提供最佳配合。经由软件采用的方法帮助用户验证指定给特定鞋类特征的尺寸的值,如下所述:
步骤1:概述
设想了一种具有用于足部尺寸测量的方法的软件,其采用了描述足部的不同部分的某些变量。这些变量可以包括前足宽度、后足宽度、第一足线长度、第五足线长度和足部尺寸。软件程序将与由用户输入的每个足部参数有关的信息输出到屏幕。具体地,程序告诉用户该输入是否在用于该特定足部参数的测量值的范围内。例如,如果值在该范围内,则输出将显示表示“输出有效”的消息。如果值在该范围之外,则消息将表示“数字无效”,并且还显示从输入值加上或减去以使该值在有效值的范围内所需的整数值。
自变量和因变量
该算法在数据分析中利用自变量和因变量。自变量可以包括前足宽度、后足宽度、第一足线长度、第五足线长度和足部尺寸。可替代地,因变量是鞋内底鞋楦底部蓝图的选定尺寸,其将确定鞋床尺寸修改。
步骤2:逻辑回归分析
在一些实例中,从足部扫描原始数据的点云计算六个最佳拟合点,这六个最佳拟合点包括前足宽度、后足宽度、足弓高度、足弓长度、足跟到第一跖趾关节的头部的值以及足跟到第五跖趾关节的头部的值。上述显著性的F检验用作统计检验,以评估主要影响和相互作用的影响并确定本发明的鞋床的六个最佳拟合点。然后使用决策树学习算法从数据(即,前足宽度、后足宽度、足弓高度、足弓长度、足跟到第一跖趾关节的头部的值、足跟到第五跖趾关节的头部的值)预测每个足部尺寸的因变量。此框架可以用于预测包括非参数回归的多变量数据,其中,预测值(predictor,预测变量)不采用预定形式,而是根据从数据导出的信息来构造。非参数回归需要较大的样本大小,这是因为数据必须提供模型结构以及模型估计。在一些实例中,使用呈基于乘积核估计的非参数回归的形式的非参数乘积回归(NPMR)。与其他回归方法一样,目标是基于一个或多个预测值(自变量)来估计响应(因变量)。
NPMR算法可以使得软件能够自动地对预测值中的复杂交互进行建模。未知参数表示为{β}beta,其可以表示标量或矢量。
自变量,{X},X。
因变量{Y},Y。
回归模型将Y与X和{β}beta的函数相关。y≈f(x,β)
这些点的近似将在代数方程中被形式化为E(y|x)=f(x,β)。
回归分析是通过知道函数f的形式来进行的,此函数的形式是基于关于Y和X之间的关系的知识,而不依赖于数据,因此必须指定f或者将选择f的方便形式。所得到的数据将估计在某种意义上最佳拟合数据的βbeta的唯一值,并且回归模型在应用于数据时可被视为超定系统或方程系统。图4中示出了回归分析的一个样本。
计算
在本方法中,响应表面的形状可能是未知的。预测值可在产生响应时相互作用;换句话说,对一个预测值的响应的形状可能取决于其他预测值。该响应是可以交叉验证并以预测方式应用于6个最佳拟合点中的每个的标准偏差的二元变量或定量。图5中示出了回归模型的一个实例。另外,计算机模拟也可以用于模拟与所述系统相关联的数学模型的结果,所述模拟用于检查所选择的数学模型的可靠性。下面示出了用于预测足部长度的某些测量值的伪代码的一个可能的实例:
实例2
先前的技术和方法可以结合到用于制造如图6所示的鞋床的单个方法中,并且参考下面的表1至表3。
一种制造鞋床的方法可以包括从数千次足部扫描中获取数据并将这些数据存储在数据库中,每次足部扫描包括请求受检者在扫描之前使受检者的足部位于距下中间位置(602)。可以基于按照鞋号分类的1000次扫描结果的平均值来平滑和过滤数据(604)。在一些实例中,通过创建不同的数据分组来完成按鞋号的分类,每个桶表示包括半尺码的特定鞋号。也就是说,可以针对鞋号8、8.5、9、9.5、10、10.5、11等创建分组。使用上述技术创建多变量线性回归模型(606)。对于每个关键的足部测量值,确定微分系数(608),并且根据表2和以下使用微分系数的公式对每个关键的足部参数计算测量值:
表1:足部人体测量尺寸:
表2:鞋床尺寸
表3:微分比
公式#1:
在鞋床参数已知的情况下确定足部人体测量的测量值:
L=M+[D.N]
公式#2:
在人体测量参数已知的情况下确定鞋床参数:
M=L-[D.N]
其中:
L=用于人体测量测量值的已知值;
M=来自现有鞋床的已知值;
D=从每个半尺码的回归数据得出的微分比;
N=表示鞋号大于6号的增量的数量的整数;并且:
因此,每个鞋床/人体测量尺寸可以通过计算每个关键鞋床测量值的尺寸来确定,该计算结合了表1和表2(上文)中列出的每个项目的参数,并且结合了每个关键参数的经由微分比“D”和整数“N”的乘积得到的微分系数(614)。结果是几乎准备好制造的鞋床模型只要进行一些调整就可以确保恰当地配合到鞋中。
可以从给定的鞋获取与鞋类鞋楦底部周界相关的第二组数据(620)。鞋楦底部数据可以转换成矢量/标量坐标(622)。如步骤620所示,来自步骤614的鞋床尺寸可以与来自步骤622的鞋楦底部周界进行比较,以确保鞋床将恰当地配合到鞋(630)。如果不需要调节,则产生最终的鞋床形状(640)。然而,如果确定来自步骤614的鞋床尺寸不适合在鞋楦底部周界内,则可以修改鞋床模型以确保恰当的配合(例如,在一个标准偏差内)。在一些实例中,不适合鞋楦底部周界内的鞋床尺寸可能需要对鞋床尺寸进行额外的调整(例如,增加或减少)。
根据本公开,鞋床具有两个主要部件:(1)顶部部分,其由泡沫构成,以提供缓冲、减震、舒适性并使压力分散,以及(2)底部部分,其由比顶部更坚固的材料构成,以提供形状、支撑性、稳定性并使压力分散。底部部分不延伸与顶部部分相同的长度。
为了实现制造效率,通常模制且因此更昂贵的底部部分与顶部部分的比例不同。底部部分的尺寸更小。通常,两种尺寸的顶部部分可与一种尺寸的底部部分一起使用,因此,需要较少的模具来生产一套完整尺寸的鞋床。例如,鞋床尺码9和9.5将使用一个尺寸的底部部分与两个尺寸的上部部分的组合。在某些实例中,注意确保较坚固的底部部分根据足部的解剖结构而对准/分级,使得不会发生负面效果。为了确保适当的配合,(a)底部部分的远端边缘总是至少接近MP关节1/2英寸,(b)底部部分的近端宽度是从第一MPJ到第五MPJ的距离的1/2,以及(c)足跟的最宽部分处的底部部分的宽度比足跟(解剖学上的足跟)宽1/8”。
足弓的形状和硬度对于足部的舒适性、支撑性和稳定控制性是重要的。为了适应个人对足弓舒适性的偏好,为鞋床提供3级硬度,而不是为每个受检者制定不同的足弓形状。这向每个鞋号提供了3级的足弓硬度,以适应不同的足弓动态和个人偏好。
在一些实例中,经由3点弯曲检验确定的鞋床的弯曲模量(弯曲应力和弯曲应变的比率)可以变化。弯曲模量可以根据以下公式计算:
E=(L
其中:
E=弯曲模量
L=检验试样的跨距长度
F=载荷
b=检验试样的宽度
h=检验试样的厚度
y=位移
在至少一些实例中,第一鞋床可以由第一弯曲模量形成,第二鞋床可以由第二弯曲模量形成,第二弯曲模量是第一弯曲模量的大约一半,并且第三弯曲模量可以由第三弯曲模量形成,第三弯曲模量是第二弯曲模量的大约一半。例如,三个大致相同形状和尺寸的鞋床可形成为如下:
最硬的鞋床具有1094的弯曲模量
中间的鞋床具有525的弯曲模量
最软的鞋床具有229的弯曲模量
本公开还考虑了用于足跟切口的独特形状。此切口允许鞋床的通常较软的减震材料的顶部部分穿过底部部分中的较硬材料伸出,并且提供一些益处。足跟中的切口的形状是独特的,并且通过检查足跟骨(跟骨)上的关键解剖点而得到。跟骨的后部部分具有髁突/结节。髁突或结节是骨骼的可将韧带和腱附接到骨骼的部分,并且通常是骨骼的小突起,这种小突起给予腱或韧带附接到骨骼上的位置,这与将使附接较困难的完全平滑的骨骼部分相反。
足跟的后部表面上的髁突/结节是许多结缔组织的连接点,其中足底筋膜是主要连接中的一个。形状像吉他拨片的切口在跟骨结节处提供了额外的缓冲和减震。此连接点通常是足底筋膜的炎症(通常称为足底筋膜炎)部位,该足底筋膜炎引起疼痛和酸痛并影响许多人。
吉他拨片形状的切口构造和布置为在关键的解剖学点处提供缓冲和减震,以便防止由于足跟中长时间的损伤而引起的足底筋膜炎,但是不会减小由鞋床的较坚固的底部部分提供的足跟处的支撑性和控制性。
提供具有穿过鞋床的底部部分伸出的较软材料的较大切口可以防止足跟损伤,但是可能以降低足跟处的控制性和稳定性为代价。理想的“吉他拨片”形状提供了所需的缓冲和减震,而不损失稳定性和控制性。
应理解,各个从属权利要求和其中阐述的特征可以组合成与初始权利要求中所呈现的不同的方式。还应理解,结合单个实施方式描述的特征可以与其他描述的实施方式共享。