一种变压器铁芯自动叠装生产线
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及变压器生产的自动化设备技术领域,具体涉及一种变压器铁芯自动叠装生产线。
背景技术
目前全国一千多家变压器生产企业铁芯叠片采用手工叠片的方式,叠片效率较低。以一台10kV小型变压器为例,整个铁芯由6千多片硅钢片按照一定的次序规律叠成,叠片工序由2人操作,若每次叠两片(简称双叠片),熟练操作工3个多小时能完成1台变压器的叠片,若每次叠一片(简称单叠片,单叠片铁芯性能优于双叠片),则需要更长的时间。大型变压器需要3人及3人以上协同操作,叠片工作量巨大繁琐,叠装周期长,且叠片一致性差、质量难以保证。操作工在叠片过程中,各硅钢片的叠放、对齐均靠经验和肉眼观察来保持叠装精度,叠片工人必须保持高度的注意力,不同工人叠装的铁芯质量有所不同,产品存在一定比例的不合格率。人工铁芯叠装的弊端在自动化生产飞速发展的今天逐步显现,成为制约变压器产业发展的重要障碍。
随着智能制造技术的发展,人工成本的上涨,高技能人才稀缺等一系列因素,对变压器铁芯叠片这类操作简单、重复性极高的工序进行工艺优化,成为降低人工成本、实现智能制造的强烈需求。因此,人们急需一种可实现自动化叠片的生产线,从而完全代替人工叠片以解决上述问题。
发明内容
本发明所要解决的技术问题为:提供一种变压器铁芯自动叠装生产线,其可完全取代现有需要人工进行硅钢片叠片的铁芯生产工艺,生产线可进行全天候24小时运转,且叠片速度高于人工叠片,能实现硅钢片的快速、准确堆叠,从而极大提高生产效率,且叠装精度高。
为解决上述技术问题所采用的技术方案是:
一种变压器铁芯自动叠装生产线,包括变压器铁芯自动叠片台,其自动叠片台两侧分别设有柱片精定位装置和轭片精定位装置,柱片精定位装置连接有柱片输送装置,轭片精定位装置连接有轭片输送装置,柱片输送装置和轭片输送装置的起始端分别设有存放相应硅钢片的供料仓;
包括送片装置,送片装置能把各供料仓的硅钢片送到对应的柱片输送装置和轭片输送装置的起始端;
各柱片输送装置和轭片输送装置分别能把起始端的硅钢片移到相应的末端;
自动叠片台与柱片输送装置之间设有柱片移片机械手和柱片堆叠机械手,自动叠片台与轭片输送装置之间设有轭片移片机械手和轭片堆叠机械手;
柱片移片机械手能把对应的柱片输送装置末端的同一级各芯柱硅钢片同时送到柱片精定位装置,柱片精定位装置能把同一级芯柱硅钢片的位置定位成与叠片铁芯的设计位置;其中轭片移片机械手能把对应的轭片输送装置末端的同一级上下轭的硅钢片送到轭片精定位装置,轭片精定位装置能把同一级上下轭硅钢片的位置定位成与叠片铁芯的设计位置;柱片堆叠机械手和轭片堆叠机械手分别能把精定位后(分别通过柱片精定位装置和轭片精定位装置精定位)的各芯柱硅钢片和上下轭的硅钢片移送到自动叠片台,实现铁芯的自动叠片。
本发明主要分柱片输送装置、轭片输送装置、柱片精定位装置、轭片精定位装置和自动叠片台,各柱片输送装置和轭片输送装置的起始端分别设有存放相应硅钢片的供料仓,自动叠片台的前面与后面均设有移片机械手和堆叠机械手。柱片精定位装置与轭片精定位装置互相垂直。工作时,把各芯柱硅钢片、上下轭的硅钢片排放在各自的供料仓,各送片装置把相应的硅钢片移到相应的输送装置的起始端,各柱片输送装置和轭片输送装置分别把起始端的硅钢片移到相应的末端;移片机械手把输送装置末端的硅钢片移送到精定位装置,其中柱片精定位装置把各芯柱硅钢片送到柱片精定位装置,柱片精定位装置能把各芯柱硅钢片的位置定位成与叠片铁芯的设计位置;其中轭片精定位装置把上下轭的硅钢片送到轭片精定位装置,轭片精定位装置把上下轭硅钢片的位置定位成与叠片铁芯的设计位置;柱片精定位装置和轭片精定位装置对各硅钢片的位置、间距等进行整形和精确定位,保证下道工序硅钢片铁芯叠装时的叠装精度和质量,堆叠机械手依次把定位后的柱片和上下轭硅钢片移送到自动叠片台,层层叠片,实现铁芯的自动叠片。
在一种优选的实施方式中,上述的柱片输送装置包括平行排列的A、B、C硅钢片输送线,B硅钢片输送线位于A硅钢片输送线和C硅钢片输送线之间,B硅钢片输送线的起始端位于A和C硅钢片输送线起始端的前面,A、B、C硅钢片输送线的末端与柱片精定位装置对接,输送到A、B、C硅钢片输送线的末端平行排列的同一级A、B、C芯柱硅钢片通过柱片移片机械手送到柱片精定位装置上;上述的轭片输送装置包括平行排列的D、E硅钢片输送线,D、E硅钢片输送线的起始端分别位于轭片精定位装置一侧的左右位置,D硅钢片输送线和E硅钢片输送线的末端位于轭片精定位装置一侧,输送到D、E硅钢片输送线的末端平行排列的同一级D、E轭片硅钢片通过轭片移片机械手送到轭片精定位装置上。
上述的供料仓包括A柱供料仓、B柱供料仓、C柱供料仓、D轭供料仓和E轭供料仓,B柱供料仓包括B1柱供料仓和B2柱供料仓,A柱供料仓、C柱供料仓、D轭供料仓和E轭供料仓分别位于A硅钢片输送线、C硅钢片输送线、D硅钢片输送线和E硅钢片输送线的起始端一侧;B1柱供料仓和B2柱供料仓分别位于B硅钢片输送线起始端左右侧。
针对三相变压器,A、B、C硅钢片分别为铁芯的三个芯柱,其中B硅钢片为中柱;D、E硅钢片分别为上下轭。
在一种优选的实施方式中,上述A、B、C、D、E硅钢片输送线包括输送架子,输送架子上设有伺服引拔臂,伺服引拔臂的两端设有同步齿轮,二个同步齿轮之间套接有与引拔臂相平行的同步带;引拔臂上设有滑道,滑道上设有与其相适配的滑块;所述的引拔臂与同步带上套接有同步带牵引块;同步带牵引块与滑块相连接,滑块上设有支撑架,支撑架上设有吸盘气缸,吸盘气缸上设有真空吸盘固定架,真空吸盘固定架上设有真空吸盘;其中的一个同步齿轮设有驱动装置;输送架子连接有托板固定架,托板固定架上部设有托板,托板位于真空吸盘固定架上面,托板中部为设有间隙,吸盘气缸初始状态,真空吸盘位于托板下面,吸盘气缸工作时,把真空吸盘从托板中部的间隙顶出。
工作时,通过机械手把硅钢片放在托板的一端,吸盘气缸工作时,把真空吸盘从托板中部的间隙顶出到硅钢片的下面,真空吸盘工作,真空吸盘紧吸硅钢片,驱动装置工作,带动同步齿轮转动,同步齿轮带动同步带转动,同步带上套接的同步带牵引块向前移动,滑块在滑道上向前移动,滑块上的支撑架前移,带动真空吸盘上的硅钢片前移,当硅钢片到达托板的另一端,真空吸盘解压,吸盘气缸的输出轴收缩,真空吸盘位于真空吸盘位于托板下面,硅钢片贴在托板,取片机械手把硅钢片送到下道工序,同时,驱动装置反方向工作,带动同步齿轮反方向转动,真空吸盘回到了托板的起始端进行下一片硅钢片的输送。由于采用真空吸盘的方式来输送硅钢片,不会出现输送带的方式进行输送出现惯性现象,避免造成输送位置不准确和冲击力大的问题。
通常,驱动装置为设有减速器的伺服电机;支撑架上设有二个及以上吸盘气缸,各吸盘气缸均设有真空吸盘固定架,真空吸盘固定架上设有二个及以上真空吸盘;引拔臂的左右端分别设有引拔极限挡块,挡块上设有缓冲胶头;滑块通过滑块转接块与同步带牵引块连接,滑块转接块上设有接近开关。
在一种优选的实施方式中,送片装置,包括通过立柱设有轨道的桁架、横跨在所述轨道上的移动梁、设在所述移动梁上且与移动梁垂直的竖梁、设在所述竖梁上能上下移动的送片机械手,所述移动梁的设有独立的行走装置沿所述轨道上行走,所述竖梁与移动梁间设有移动装置,竖梁通过上下动力装置能在移动梁上来回移动,送片机械手末端安装专用取放片工具装置,取放片工具装置包括吸盘固定板和吸盘固定板下安装的取料吸盘。本发明可实现X,Y,Z三个方向的快速移动和Z轴末端的取料吸盘取放硅钢片,运动灵活无死角,工作效率高。取料吸盘通过吸气管与真空泵连接,通过真空泵工作产生负压来实现吸住硅钢片,释放负压,真空吸盘松开硅钢片。真空泵系统:在负压吸气管路上安装真空用两位三通电磁阀,通电吸气,断电放气。
在一种优选的实施方式中,上述送片装置包括A芯柱送片装置、B1芯柱送片装置、B2芯柱送片装置、C芯柱送片装置、D轭片送片装置和E轭片送片装置,分别位于A柱供料仓、B1柱供料仓、B2柱供料仓、C柱供料仓、D轭供料仓和E轭供料仓位置,A芯柱送片装置、B1芯柱送片装置、B2芯柱送片装置、C芯柱送片装置均通过立柱设有两根平行轨道的桁架、横跨在所述两根平行轨道上的移动梁,所述移动梁的两端分别设有独立的行走装置沿所述轨道上同步行走;所述移动梁的设有独立的行走装置、所述竖梁与移动梁间的移动装置、竖梁的上下动力装置均为伺服电机驱动。
在一种优选的实施方式中,柱片精定位装置和轭片精定位装置包括架子,架子上设有安装顶板,安装顶板上设有定位组合,定位组合包括相互平行的挡条和二根挡条之间一侧的定位块,定位块设有被加工硅钢片一端相适配的凹槽;二根挡条能向内移动,定位块能向挡条方向移动;初始状态,二根挡条之间的间距大于被加工硅钢片的宽度;二根挡条设有带动向其内侧移动的同步驱动装置,定位块设有带动向挡条方向移动的推压驱动装置。
当通过机械手把被加工的硅钢片放在二根挡条之间时,同步驱动装置带动二根挡条向内移动,压住被加工的硅钢片两侧,推压驱动装置带动定位块向挡条(硅钢片)方向移动,硅钢片的一侧位于定位块凹槽内,推动硅钢片至设定的位置,实现硅钢片精确定位,然后由机械手取片,同步驱动装置和推压驱动装置带动二根挡条回到初始状态。
在一种优选的实施方式中,安装顶板的下面架子上设有安装底板,同步驱动装置包括同步伺服电机、同步传动带、输出带轮和一对同步传动带轮,同步传动带安装在输出带轮和一对同步传动带轮上,同步伺服电机的转轴与输出带轮的中心轴连接,各同步传动带轮的中心轴连接有同步传动丝杆,两根同步传动丝杆的螺纹方向相反,同步传动丝杆连接支撑丝杆的轴承支座;安装底板上设有定位的平移滑轨,平移滑轨上设有与其相适配的移动滑块;二根同步传动丝杆上分别传设有相适配的螺母转换件,螺母转换件与移动滑块固定在一起,二个螺母转换件分别与定位组合中的二根挡条固定连接;上述二根挡条分别为动挡条和静挡条,其中的一个螺母转换件上连接有推动气缸,推动气缸的输出轴与定位组合中的动挡条固定连接。
使用时,当同步伺服电机正传,带动同步传动带传动,二个同步传动带轮转动,带动两根同步传动丝杆转动,由于两根同步传动丝杆的螺纹方向相反,螺母转换件分别带动相应挡条向内移动,压住被加工的硅钢片两侧,实现硅钢片横向定位。反之,当同步伺服电机反传,带动同步传动带传动,两根挡条回到初始状态。由于采用动挡条和静挡条结构,该方式中,在使用时,当同步伺服电机正传,带动同步传动带传动,二个同步传动带轮转动,带动两根同步传动丝杆转动,由于两根同步传动丝杆的螺纹方向相反,螺母转换件分别带动相应挡条向内移动,当挡条移动到设定位置时,同步伺服电机停止工作,静挡条作为硅钢片的定位靠山,推动气缸工作,其输出轴顶出,带动动挡条往内侧移动,实现硅钢片横向定位。
在一种优选的实施方式中,推压驱动装置为推压伺服电机,定位块下面连接有传动螺母,传动螺母内旋有与其相适配的传动丝杆,传动丝杆与推压伺服电机的转轴连接。使用时,通过推压伺服电机的正传和反转来实现定位块来回移动。
在一种优选的实施方式中,上述柱片精定位装置的定位组合三组,上述轭片精定位装置的定位组合二组;同步驱动装置同时驱动各定位组合的挡条移动,推压驱动装置同时驱动各定位组合的定位块移动。
本发明柱片精定位装置和轭片精定位装置对各硅钢片的位置、间距等进行整形和精确定位,保证下道工序硅钢片铁芯叠装时的叠装精度和质量,自动化水平高,从而保证了铁芯的外形美观和变压器质量的稳定性。
上述的柱片移片机械手、柱片堆叠机械手、轭片移片机械手和轭片堆叠机械手均包括行架,行架上设有行拱,行拱上设有滑轨,各机械手的上部为横行滑板和下部的治具底板,横行滑板与治具底板通过支撑柱连接,横行滑板能在滑轨上来回移动,横行滑板上设有动力驱动装置,动力驱动装置控制和带动横行滑板在滑轨上来回移动;上述的柱片移片机械手、柱片堆叠机械手的治具底板安装有三排取放片工具装置;上述的轭片移片机械手和轭片堆叠机械手安装有二排取放片工具装置;取放片工具装置包括固定板和固定板下安装的取片吸盘,治具底板下连接有支架,支架上设有气缸,气缸的输出轴与固定板相连接。
变压器硅钢片通常有上下轭,上下轭采用二排取放片工具装置;三柱的铁芯,采用三排取放片工具装置;四柱的铁芯,采用四排取放片工具装置;五柱的铁芯,采用五排取放片工具装置。通过横行滑板在行拱上的移动,以及治具底板下的取放片工具装置,把硅钢片同步叠片到相应位置。
在一种优选的实施方式中,上述柱片堆叠机械手的取放片工具装置还包括固定板和固定板下安装的取片吸盘,治具底板下设有支架,支架上设有气缸,气缸的输出轴与固定板相连接;设有同步驱动装置,同步驱动装置能驱动左右排取放片工具装置向内、外侧移动,同步驱动装置包括同步电机、同步带和一对同步带轮,治具底板上设有电机固定板,电机固定板上设有同步电机,同步带安装在一对同步带轮上,同步电机的转轴与其中的一个同步带轮的中心轴连接,另一个同步带轮的中心轴分别连接有左右同步丝杆,两根同步丝杆的螺纹方向相反,同步丝杆连接支撑丝杆的轴承座;两根同步丝杆上分别传设有相适配的螺母转换块,螺母转换块分别与左右支架固定在一起,中间的支架与治具底板相连接。
当然柱片移片机械手也可以采用同一样的结构,该结构用于A、B、C硅钢片分别为铁芯的三个芯柱片的叠片,柱片移片机械手把输送装置末端的硅钢片移送到精定位装置,柱片精定位装置把各芯柱硅钢片的位置定位成与叠片铁芯的设计位置后;用于本发明通过堆叠机械手把精定位后的A、B、C硅钢片依次移送到自动叠片台,层层叠片,实现铁芯柱片的自动叠片。
同步电机工作,带动同步带轮转动,进一步带动两根同步丝杆转动,二个螺母转换块分别在同步丝杆的转动下,可以在同步丝杆上来回移动,与其连接的左右支架就能向内外侧来回移动,左右排取放片工具装置向内、外侧移动。该结构用于变压器铁芯A、B、C三柱的铁芯硅钢片的叠片,中柱B的硅钢片为固定位置,左右芯柱的硅钢片用于同步电机能带动左右两侧的取放片工具装置向内、外侧同步移动,根据设计要求,达到A、B、C三柱的铁芯硅钢片设计位置。
在一种优选的实施方式中,上述轭片堆叠机械手的取放片工具装置包括固定板和固定板下安装的取片吸盘,治具底板下设有支架,支架上设有气缸,气缸的输出轴与固定板相连接;设有同步驱动装置,同步驱动装置能驱动其中一排取放片工具装置向内、外侧移动,同步驱动装置包括同步电机、同步带和一对同步带轮,治具底板上设有电机固定板,电机固定板上设有同步电机,同步带安装在一对同步带轮上,同步电机的转轴与其中的一个同步带轮的中心轴连接,另一个同步带轮的中心轴分别连接有同步丝杆,同步丝杆连接支撑丝杆的轴承座;其中的一排取放片工具装置的支架与治具底板连接,另一排取放片工具装置的支架连接有与同步丝杆相适配的螺母转换块,螺母转换块位于同步丝杆上。
当然轭片移片机械手也可以采用同一样的结构。同步电机工作,带动同步带轮转动,进一步带动同步丝杆转动,螺母转换块在同步丝杆的转动下,可以在同步丝杆上来回移动,与其连接的支架就能向内外侧来回移动,其排取放片工具装置向内、外侧移动。该结构用于变压器铁芯D、E上下轭的铁芯硅钢片的叠片,其中一侧的硅钢片为固定位置,另一芯柱的硅钢片用于同步电机能带动其的取放片工具装置向内、外侧同步移动,根据设计要求,达到D、E上下轭的铁芯硅钢片设计位置。
在一种优选的实施方式中,行拱上设有两条平行的滑轨,横行滑板和滑轨之间设有滑块组件,横行滑板上的动力驱动装置包括带减速机的伺服电机,横行滑板上设有减速机转接板,带减速机的伺服电机位于减速机转接板上,减速机的输出轴上设有齿轮,行拱上设有与齿轮相适配的齿条,伺服电机工作,能带动横行滑板在滑轨上来回移动。
在一种优选的实施方式中,横行滑板的前后端各设有防撞转接块,防撞转接块上设有防撞橡胶头,横行滑板的齿条或滑轨的前后端分别设有接近开关。通过横行滑板在行拱上的移动,以及治具底板下的取放片工具装置,把硅钢片同步叠片到相应位置,满足叠片过程中复杂的抓取和放下动作的精确定位问题,以达到自动化叠片目的。因此,其替代了人工手动叠片动作,叠片整齐,待叠钢片定位精准,提高了铁芯的成品率,变压器质量也较为稳定;实现芯柱硅钢片或上下轭的铁芯硅钢片同步叠片,提高了叠片精度和叠片效率。
本发明的有益效果是:
1、生产效率显著提高,降低叠片成本。通过变压器铁心自动叠片机器人的研发,提高叠片效率,降低叠片成本。在产品大批量生产时,自动叠片机器人可以24小时连续生产,能克服人工叠装在夜间光线不足时叠装精度不高的问题,提高的生产时间的利用率和生产效率。
2、提高了产品优质率。叠装精度较高,提高了产品优质率;同时自动叠片机器人在长时间运行或加班运行时,相对与人工叠片,优势更为明显,叠片质量稳定,出错概率远低于人工叠片,从而保证了铁芯的外形美观和变压器质量的稳定性,并能保证产品质量。
3、提高了资源利用率。使用本发明的生产线,一名工人可同时看管多台设备,大量节省人力资源,减少用工费用。另外本发明操作维护均较简单,普通工人进行大约半天的培训即能熟练操作,大大节省了工人的培训时间和费用。
附图说明
图1是本发明实施例生产线的布局示意图;
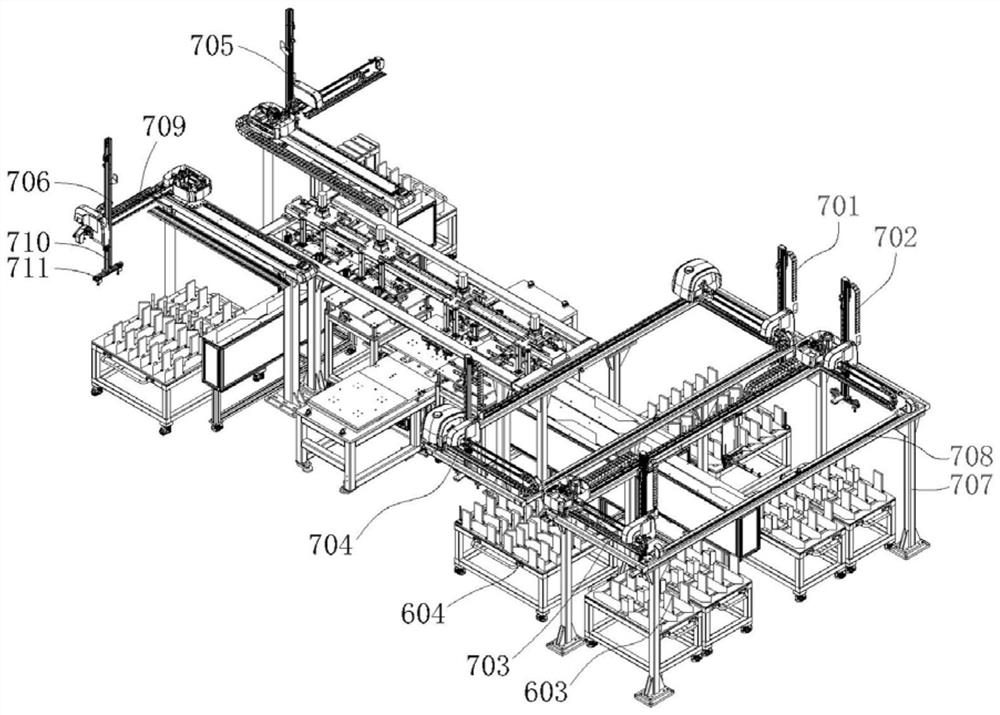
图2是本发明实施例生产线的立体图;
图3是本发明实施例自动叠片台的立体图;
图4是本发明实施例轭片输送装置的立体图;
图5是本发明实施例轭片输送装置去掉托板固定架的立体图;
图6是本发明实施例轭片输送装置伺服引拔臂的立体图;
图7是本发明实施例柱片输送装置的立体图;
图8是本发明实施例轭片精定位装置的立体图;
图9是本发明实施例轭片精定位装置去掉安装顶板的立体图;
图10是本发明实施例轭片精定位装置安装底板的立体图;
图11是本发明实施例轭片精定位装置定位块的立体图;
图12是本发明实施例图10的局部A的放大图;
图13是本发明实施例图11的局部B放大图;
图14是本发明实施例柱片精定位装置的立体图;
图15是本发明实施的静挡条的立体图;
图16是本发明实施的动挡条的立体图;
图17是本发明实施例行架的侧面视图;
图18是本发明实施例行架的立体图;
图19是本发明实施例柱片堆叠机械手的立体图;
图20是本发明实施例柱片堆叠机械手治具底板的立体图;
图21是本发明实施例柱片堆叠机械手安装顶板的立体图;
图22是本发明实施例轭片堆叠机械手的立体图;
图23是本发明实施例轭片堆叠机械手治具底板的立体图。
图中各附图标记为:1自动叠片台、2柱片精定位装置、201柱片移片机械手、202柱片堆叠机械手、203架子、204安装顶板、205挡条、206定位块、207凹槽、208安装底板、209同步伺服电机、210同步传动带、211输出带轮、212同步传动带轮、213同步传动丝杆、214轴承支座、215平移滑轨、216移动滑块、217螺母转换件、218动挡条、219静挡条、220推动气缸、221推压伺服电机、222传动螺母、223传动丝杆、3轭片精定位装置、301轭片移片机械手、302轭片堆叠机械手、303行架、304行拱、305滑轨、306横行滑板、307治具底板、308取放片工具装置、309固定板、310取片吸盘、311支架、312气缸、313同步驱动装置、314同步电机、315同步带、316同步带轮、317电机固定板、318同步丝杆、319轴承座、320螺母转换块、321滑块组件、322减速机、323伺服电机、324减速机转接板、325齿轮、326齿条、4柱片输送装置、401A硅钢片输送线、402B硅钢片输送线、403C硅钢片输送线、5轭片输送装置、501D硅钢片输送线、502E硅钢片输送线、503输送架子、504伺服引拔臂、505同步齿轮、506同步带、507滑道、508滑块、509同步带牵引块、510支撑架、511吸盘气缸、512真空吸盘固定架、513真空吸盘、514托板固定架、515托板、516间隙、517伺服电机、518挡块、519缓冲胶头、6供料仓、601A柱供料仓、602B1柱供料仓、603B2柱供料仓、604C柱供料仓、605D轭供料仓、606E轭供料仓、7送片装置、701A芯柱送片装置、702B1芯柱送片装置、703B2芯柱送片装置、704C芯柱送片装置、705D轭片送片装置、706E轭片送片装置、707立柱、708桁架、709移动梁、710竖梁、711送片机械手、8硅钢片。
具体实施方式
下面结合图1至图23的各附图,对本发明做详细描述。
本实施例以三相变压器为例,A、B、C硅钢片分别为铁芯的三个芯柱,其中B硅钢片为中柱;D、E硅钢片分别为上下轭。
结合图1和图2,本发明所述的一种变压器铁芯自动叠装生产线,包括变压器铁芯自动叠片台1,其自动叠片台1两侧分别设有柱片精定位装置2和轭片精定位装置3,柱片精定位装置2连接有柱片输送装置4,轭片精定位装置3连接有轭片输送装置5,柱片输送装置4和轭片输送装置5的起始端分别设有存放相应硅钢片8的供料仓6;包括送片装置7,送片装置7能把各供料仓6的硅钢片8送到对应的柱片输送装置4和轭片输送装置5的起始端;各柱片输送装置4和轭片输送装置5分别能把起始端的硅钢片8移到相应的末端。
柱片输送装置4包括平行排列的A、B、C硅钢片输送线,B硅钢片输送线402位于A硅钢片输送线401和C硅钢片输送线403之间,B硅钢片输送线402的起始端位于A和C硅钢片输送线起始端的前面,A、B、C硅钢片输送线的末端与柱片精定位装置2对接,输送到A、B、C硅钢片输送线的末端平行排列的同一级A、B、C芯柱硅钢片通过柱片移片机械手201送到柱片精定位装置2上;上述的轭片输送装置5包括平行排列的D硅钢片输送线501和E硅钢片输送线502,D、E硅钢片输送线的起始端分别位于轭片精定位装置3一侧的左右位置,D硅钢片输送线501和E硅钢片输送线502的末端位于轭片精定位装置3一侧,输送到D、E硅钢片输送线的末端平行排列的同一级D、E轭片硅钢片通过轭片移片机械手301送到轭片精定位装置3上。供料仓6包括A柱供料仓601、B柱供料仓、C柱供料仓604、D轭供料仓605和E轭供料仓606,B柱供料仓包括B1柱供料仓602和B2柱供料仓603,A柱供料仓601、C柱供料仓604、D轭供料仓605和E轭供料仓606分别位于A硅钢片输送线401、C硅钢片输送线403、D硅钢片输送线501和E硅钢片输送线502的起始端一侧;B1柱供料仓602和B2柱供料仓603分别位于B硅钢片输送线402起始端左右侧。
自动叠片台1与柱片输送装置2之间设有柱片移片机械手201和柱片堆叠机械手202,自动叠片台1与轭片输送装置3之间设有轭片移片机械手301和轭片堆叠机械手302;
柱片移片机械手201能把对应的柱片输送装置4末端的同一级各芯柱硅钢片8同时送到柱片精定位装置2,柱片精定位装置2能把同一级芯柱硅钢片8的位置定位成与叠片铁芯的设计位置;其中轭片移片机械手301能把对应的轭片输送装置5末端的同一级上下轭的硅钢片8送到轭片精定位装置3,轭片精定位装置3能把同一级上下轭硅钢片8的位置定位成与叠片铁芯的设计位置;柱片堆叠机械手202和轭片堆叠机械手302分别能把精定位后的各芯柱硅钢片和上下轭的硅钢片移送到自动叠片台1,实现铁芯的自动叠片。
参见图4至图7中,A、B、C、D、E硅钢片输送线包括输送架子503,,输送架子503上设有伺服引拔臂504,伺服引拔臂504的两端设有同步齿轮505,二个同步齿轮505之间套接有与引拔臂504相平行的同步带506;引拔臂504上设有滑道507,滑道507上设有与其相适配的滑块508;所述的引拔臂504与同步带506上套接有同步带牵引块509;同步带牵引块509与滑块508相连接,滑块508上设有支撑架510,支撑架510上设有吸盘气缸511,吸盘气缸511上设有真空吸盘固定架512,真空吸盘固定架512上设有真空吸盘513;其中的一个同步齿轮505设有驱动装置;输送架子503连接有托板固定架514,托板固定架514上部设有托板515,托板515位于真空吸盘固定架512上面,托板515中部为设有间隙516,吸盘气缸511初始状态,真空吸盘513位于托板515下面,吸盘气缸511工作时,把真空吸盘513从托板515中部的间隙516顶出。
工作时,通过机械手把硅钢片8放在托板515的一端,吸盘气缸511工作时,把真空吸盘513从托板515中部的间隙516顶出到硅钢片8的下面,真空吸盘513工作,真空吸盘513紧吸硅钢片8,驱动装置工作,带动同步齿轮505转动,同步齿轮505带动同步带506转动,同步带506上套接的同步带牵引块509向前移动,滑块508在滑道507上向前移动,滑块508上的支撑架510前移,带动真空吸盘513上的硅钢片8前移,当硅钢片8到达托板515的另一端,真空吸盘513解压,吸盘气缸511的输出轴收缩,真空吸盘513位于托板515下面,硅钢片8贴在托板515,取片机械手把硅钢片8送到下道工序,同时,驱动装置反方向工作,带动同步齿轮505反方向转动,真空吸盘513回到了托板515的起始端进行下一片硅钢片8的输送。由于采用真空吸盘513的方式来输送硅钢片8,不会出现输送带的方式进行输送出现惯性现象,避免造成输送位置不准确和冲击力大的问题。
本实施例中驱动装置为设有减速器的伺服电机517;支撑架510上设有二个及以上吸盘气缸511,各吸盘气缸511均设有真空吸盘固定架512,真空吸盘固定架512上设有二个及以上真空吸盘513;引拔臂504的左右端分别设有引拔极限挡块518,挡块518上设有缓冲胶头519;滑块508通过滑块转接块与同步带牵引块连接,滑块转接块上设有接近开关。
参见图17至图23中,送片装置7包括A芯柱送片装置701、B1芯柱送片装置702、B2芯柱送片装置703、C芯柱送片装置704、D轭片送片装置705和E轭片送片装置706,分别位于A柱供料仓601、B1柱供料仓602、B2柱供料仓603、C柱供料仓604、D轭供料仓605和E轭供料仓606位置,A芯柱送片装置701、B1芯柱送片装置702、B2芯柱送片装置703、C芯柱送片704装置均通过立柱707设有两根平行轨道的桁架708、横跨在所述两根平行轨道上的移动梁709,所述移动梁709的两端分别设有独立的行走装置沿所述轨道上同步行走;D轭片送片装置705和E轭片送片装置706包括通过立柱707设有轨道的桁架708、横跨在所述轨道上的移动梁709、设在所述移动梁709上且与移动梁709垂直的竖梁710、设在所述竖梁710上能上下移动的送片机械手711,所述移动梁709的设有独立的行走装置沿所述轨道上行走,所述竖梁710与移动梁709间设有移动装置,竖梁710通过上下动力装置能在移动梁709上来回移动。送片机械手711末端安装专用取放片工具装置,取放片工具装置包括吸盘固定板和吸盘固定板下安装的取料吸盘。所述移动梁709的设有独立的行走装置、所述竖梁710与移动梁709间的移动装置、竖梁710的上下动力装置均为伺服电机驱动。本发明可实现X,Y,Z三个方向的快速移动和Z轴末端的取料吸盘取放硅钢片,运动灵活无死角,工作效率高。取料吸盘通过吸气管与真空泵连接,通过真空泵工作产生负压来实现吸住硅钢片,释放负压,真空吸盘松开硅钢片。真空泵系统:在负压吸气管路上安装真空用两位三通电磁阀,通电吸气,断电放气
参见图8至图16中,柱片精定位装置2和轭片精定位装置3包括架子203,架子203上设有安装顶板204,安装顶板204上设有定位组合,柱片精定位装置2的定位组合三组,轭片精定位装置3的定位组合二组;定位组合包括相互平行的挡条205和二根挡条205之间一侧的定位块206,定位块206设有被加工硅钢片8一端相适配的凹槽207;二根挡条205能向内移动,定位块206能向挡条205方向移动;初始状态,二根挡条205之间的间距大于被加工硅钢片8的宽度;二根挡条205设有带动向其内侧移动的同步驱动装置,定位块206设有带动向挡条205方向移动的推压驱动装置。安装顶板204的下面架子203上设有安装底板208,同步驱动装置包括同步伺服电机209、同步传动带210、输出带轮211和一对同步传动带轮212,同步传动带210安装在输出带轮211和一对同步传动带轮212上,同步伺服电机209的转轴与输出带轮211的中心轴连接,各同步传动带轮212的中心轴连接有同步传动丝杆213,两根同步传动丝杆213的螺纹方向相反,同步传动丝杆213连接支撑同步传动丝杆213的轴承支座214;安装底板208上设有定位的平移滑轨215,平移滑轨215上设有与其相适配的移动滑块216;两根同步传动丝杆213上分别传设有相适配的螺母转换件217,螺母转换件217与移动滑块216固定在一起,二个螺母转换件217分别与定位组合中的二根挡条205固定连接;上述二根挡条205分别为动挡条218和静挡条219,其中的一个螺母转换件217上连接有推动气缸220,推动气缸220的输出轴与定位组合中的动挡条218固定连接。推压驱动装置为推压伺服电机221,定位块206下面连接有传动螺母222,传动螺母222内旋有与其相适配的传动丝杆223,传动丝杆223与推压伺服电机221的转轴连接。使用时,通过推压伺服电机221的正传和反转来实现定位块206来回移动。
当通过机械手把被加工的硅钢片8放在二根挡条205之间时,同步驱动装置带动二根挡条205向内移动,压住被加工的硅钢片8两侧,推压驱动装置带动定位块206向挡条205(硅钢片8)方向移动,硅钢片8的一侧位于定位块206凹槽207内,推动硅钢片8至设定的位置,实现硅钢片8精确定位,然后由机械手取片,同步驱动装置和推压驱动装置带动二根挡条205回到初始状态。本发明实施例使用时,当同步伺服电机209正传,带动同步传动带210传动,二个同步传动带轮212转动,带动两根同步传动丝杆213转动,由于两根同步传动丝杆213的螺纹方向相反,螺母转换件217分别带动相应挡条205向内移动,压住被加工的硅钢片8两侧,实现硅钢片8横向定位。反之,当同步伺服电机209反传,带动同步传动带210传动,两根挡条205回到初始状态。由于采用动挡条218和静挡条219结构,该方式中,在使用时,当同步伺服电机209正传,带动同步传动带210传动,二个同步传动带轮212转动,带动两根同步传动丝杆213转动,由于两根同步传动丝杆213的螺纹方向相反,螺母转换件217分别带动相应挡条205向内移动,当挡条205移动到设定位置时,同步伺服电机209停止工作,静挡条219作为硅钢片8的定位靠山,推动气缸220工作,其输出轴顶出,带动动挡条218往内侧移动,实现硅钢片8横向定位。本发明柱片精定位装置2和轭片精定位装置3对各硅钢片8的位置、间距等进行整形和精确定位,保证下道工序硅钢片铁芯叠装时的叠装精度和质量,自动化水平高,从而保证了铁芯的外形美观和变压器质量的稳定性。
参见图19和图23中,柱片移片机械手201、柱片堆叠机械手202、轭片移片机械手301和轭片堆叠机械手302均包括行架303,行架303上设有行拱304,行拱304上设有滑轨305,各机械手的上部为横行滑板306和下部的治具底板307,横行滑板306与治具底板307通过支撑柱连接,横行滑板306能在滑轨305上来回移动,横行滑板306上设有动力驱动装置,动力驱动装置控制和带动横行滑板306在滑轨305上来回移动;上述的柱片移片机械手201、柱片堆叠机械手202的治具底板307安装有三排取放片工具装置308;上述的轭片移片机械手301和轭片堆叠机械手302安装有二排取放片工具装置308;取放片工具装置308包括固定板309和固定板309下安装的取片吸盘310,治具底板307下连接有支架311,支架311上设有气缸312,气缸312的输出轴与固定板309相连接。
参见图19至图21中,柱片堆叠机械手202的取放片工具装置308还包括固定板309和固定板309下安装的取片吸盘310,治具底板307下设有支架311,支架311上设有气缸312,气缸312的输出轴与固定板309相连接;设有同步驱动装置313,同步驱动装置313能驱动左右排取放片工具装置308向内、外侧移动,同步驱动装置313包括同步电机314、同步带315和一对同步带轮316,治具底板307上设有电机固定板317,电机固定板317上设有同步电机314,同步带315安装在一对同步带轮316上,同步电机314的转轴与其中的一个同步带轮316的中心轴连接,另一个同步带轮316的中心轴分别连接有左右同步丝杆318,两根同步丝杆318的螺纹方向相反,同步丝杆318连接支撑同步丝杆318的轴承座319;两根同步丝杆318上分别传设有相适配的螺母转换块320,螺母转换320块分别与左右支架311固定在一起,中间的支架311与治具底板307相连接。本发明实施例的柱片移片机械手201采用同一样的结构,该结构用于A、B、C硅钢片分别为铁芯的三个芯柱片的叠片,柱片移片机械手201把柱片输送装置4末端的硅钢片8移送到柱片精定位装置2,柱片精定位装置2把各芯柱硅钢片的位置定位成与叠片铁芯的设计位置后;用于本发明通过柱片堆叠机械手202把精定位后的A、B、C硅钢片依次移送到自动叠片台1,层层叠片,实现铁芯柱片的自动叠片。
同步电机314工作,带动同步带轮316转动,进一步带动两根同步丝杆318转动,二个螺母转换块320分别在同步丝杆318的转动下,可以在同步丝杆318上来回移动,与其连接的左右支架311就能向内外侧来回移动,左右排取放片工具装置308向内、外侧移动。该结构用于变压器铁芯A、B、C三柱的铁芯硅钢片的叠片,中柱B的硅钢片为固定位置,左右芯柱的硅钢片用于同步电机314能带动左右两侧的取放片工具装置308向内、外侧同步移动,根据设计要求,达到A、B、C三柱的铁芯硅钢片设计位置。
参见图22和图23中,轭片堆叠机械手302的取放片工具装置308包括固定板309和固定板309下安装的取片吸盘310,治具底板307下设有支架311,支架311上设有气缸312,气缸312的输出轴与固定板相连接;设有同步驱动装置313,同步驱动装置313能驱动其中一排取放片工具装置308向内、外侧移动,同步驱动装置313包括同步电机314、同步带315和一对同步带轮316,治具底板307上设有电机固定板317,电机固定板317上设有同步电机314,同步带315安装在一对同步带轮316上,同步电机314的转轴与其中的一个同步带轮316的中心轴连接,另一个同步带轮316的中心轴连接有同步丝杆318,同步丝杆318连接支撑同步丝杆318的轴承座319;其中的一排取放片工具装置308的支架311与治具底板307连接,另一排取放片工具装置308的支架311连接有与同步丝杆318相适配的螺母转换块320,螺母转换块320位于同步丝杆318上。本发明实施例的轭片移片机械手301采用同一样的结构。同步电机314工作,带动同步带轮316转动,进一步带动同步丝杆318转动,螺母转换块320在同步丝杆318的转动下,可以在同步丝杆318上来回移动,与其连接的支架311就能向内外侧来回移动,其排取放片工具装置308向内、外侧移动。该结构用于变压器铁芯D、E上下轭的铁芯硅钢片的叠片,其中一侧的硅钢片为固定位置,另一芯柱的硅钢片用于同步电机314能带动其的取放片工具装置308向内、外侧同步移动,根据设计要求,达到D、E上下轭的铁芯硅钢片设计位置。
行拱304上设有两条平行的滑轨305,横行滑板306和滑轨305之间设有滑块组件321,横行滑板306的动力驱动装置包括带减速机322的伺服电机323,横行滑板306设有减速机转接板324,带减速机的伺服电机323位于减速机转接板324上,减速机322的输出轴上设有齿轮325,行拱304上设有与齿轮325相适配的齿条326,伺服电机323工作,能带动横行滑板306在滑轨305上来回移动。
本发明大大提高了叠片效率,降低叠片成本。
在生产效率方面,本发明实施例以10kV变压器铁心叠装为例,叠装量按工作10小时计可叠3台,同时1个工人可以同时看管4台机,这样一个工人8小时可完成12台;因人工叠片需两人配合,1个工人相当于原来12个工人,同样的生产任务,人员减少了91.6%。在产品大批量生产时,自动叠片机器人可以24小时连续生产,能克服人工叠装在夜间光线不足时叠装精度不高的问题,提高的生产时间的利用率和生产效率。
在产品优质率方面,其叠装精度较高,产品优质率可以提高25%以上。自动叠片机器人在长时间运行或加班运行时,相对与人工叠片,优势更为明显,并能保证产品质量。避免了由于人工无法时刻保持注意力集中所导致的叠片不齐,影响铁芯外形美观甚至变压器质量的问题。
在资源利用率方面,使用自动叠片机器人生产,一名工人可同时看管4台机以上,大量节省人力资源,减少用工费用。自动叠片机器人操作维护均较简单,普通工人进行大约0.5天的培训即能熟练操作,而培训一名熟练的手工叠装工人大约需要7天左右,节省了工人的培训时间和费用。
以上所述仅为本发明的优选实施例,并非因此即限制本发明的专利保护范围,凡是运用本发明说明书及附图内容所作的等效结构变换,直接或间接运用在其他相关的技术领域,均同理包括在本发明的保护范围内。
- 一种变压器铁芯自动叠装生产线
- 一种变压器铁芯自动叠装生产线定位识别装置