一种便携涵道式微小型单旋翼无人机
文献发布时间:2023-06-19 10:40:10
技术领域
本发明专利设计无人机领域,尤其涉及一种便携涵道式微小型单旋翼无人机。
背景技术
随着无人机行业的迅速发展,无人机将会像相机一样进入普通消费者的日常生活、工作、娱乐中。而以往四旋翼无人机都是固定式的机臂,产品体积较大,占空间,特别是薄而锋利的叶片在高速工作时更是让大多数人畏惧,产品没有亲和力;目前杯状无人机大都采用共轴双桨的结构,双桨存在的问题是:抗扰性、机动性差,无法满足高机动作战的需求,且双桨结构抗风性能差,无法满足多变的作战场景。
发明内容
本发明的目的在于提供一种便携涵道式微小型单旋翼无人机,该无人机可携带性、抗扰性、机动性更强,而且具有更加可靠的飞行特性。
实现本发明目的的技术解决方案为:一种便携涵道式微小型单旋翼无人机,包括单螺旋桨、动力传动杆和无人机外壳,无人机外壳内部安装有螺旋桨动力装置、第一固定板、小型涡轮、涡轮动力装置、无人机内置分层、飞行控制箱、传感器、电池、第二固定板、四个空气舵面以及相应的四个控制舵机、空气流通通道和进气口;所述单螺旋桨位于无人机外壳上方,安装于动力传动杆上端,且动力传动杆下端与螺旋桨动力装置相连接,所述螺旋桨动力装置安装在第一固定板上;所述小型涡轮在固定板的下方,小型涡轮下方安装有涡轮动力装置;所述无人机内置分层将小型涡轮以下第二固定板以上的空间隔离为内外两部分空间,其中外部空间为空气流通通道,内部空间依次安装飞行控制箱、各类传感器、电池和四个控制舵机,电池和四个控制舵机安装在第二固定板上;所述四个空气舵面安装于无人机底部,分别由四个控制舵机单独控制。
优选地,所述第一固定板,除了用于固定螺旋桨动力装置的部分,其余部分采用中空结构,便于气流的流通。
优选地,所述飞行控制箱内部装有无人机飞行控制器和自动驾驶仪。
优选地,所述无人机内置分层安装于整个无人机外壳的中间部分。
优选地,所述四个空气舵面其中两个对称安装于无人机外壳内壁相对两侧,另外两个对称安装于无人机外壳内壁的另外两侧。
优选地,所述无人机外壳为圆柱状。
优选地,所述单螺旋桨可拆卸安装于动力传动杆上端。
本发明与现有技术相比,其显著优点为:本发明通过圆柱状的无人机外壳将机体除桨叶外的所有部分包括起来,使得单体无人机可携带性、抗扰性、机动性更强;由于电池安装于整个机体的底部,使得无人机重心靠下,这就使得当飞行时的无人机底部空气舵面改变方向时,能够很容易产生一个不平衡的矢量力,在这个不平衡的矢量力作用下,很容易控制无人机飞行方向,使得无人机具有更加可靠的飞行特性。
附图说明
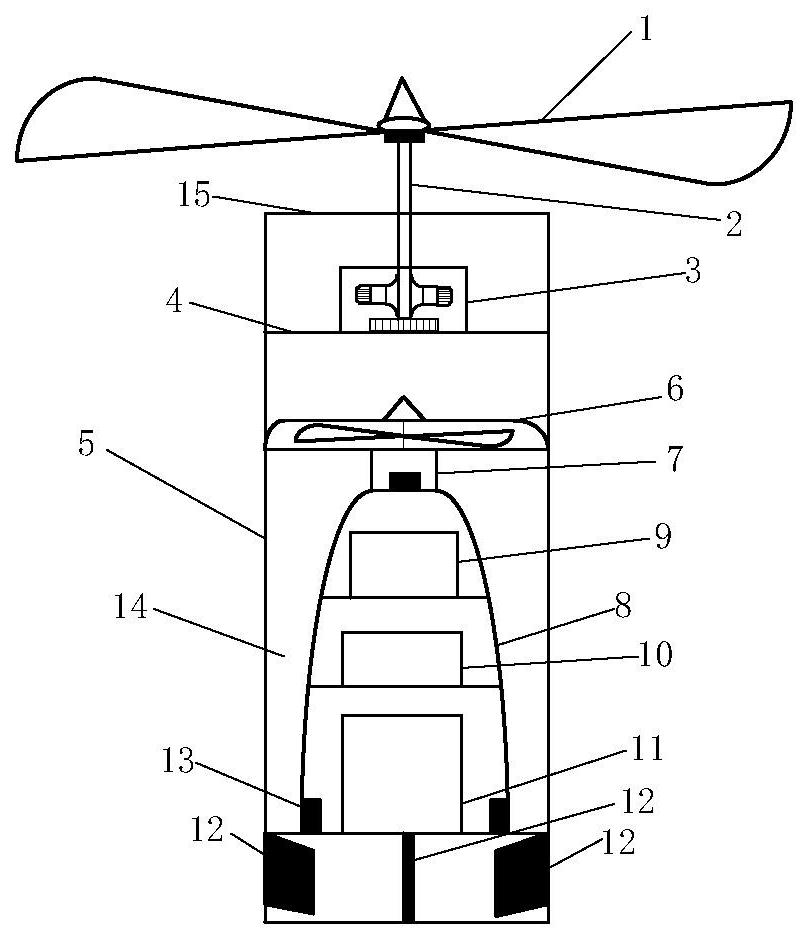
图1为本发明便携涵道式微小型单旋翼无人机结构图。
具体实施方式
下面将结合本发明专利中的附图,对本发明中所实施的技术进行完整、清楚的描述,显然,所描述的仅仅是本发明中的大部分,而不是全部的。
参照图1,一种便携涵道式微小型单旋翼无人机结构设计,包括单螺旋桨1、动力传动杆2和无人机外壳5,无人机外壳5内部安装有螺旋桨动力装置3、第一固定板4、小型涡轮6、涡轮动力装置7、无人机内置分层8、飞行控制箱9、各类传感器10、电池11、第二固定板、四个空气舵面12以及相应的四个控制舵机13、空气流通通道14和进气口15;所述无人机外壳5为圆柱状,所述单螺旋桨1位于无人机外壳5上方,可拆卸安装于动力传动杆2上端,且动力传动杆2下端与螺旋桨动力装置3相连接,所述螺旋桨动力装置3安装在第一固定板4上;所述小型涡轮6在第一固定板4的下方,小型涡轮6下方安装有涡轮动力装置7;所述无人机内置分层8安装于整个无人机外壳5的中间部分,无人机内置分层8将小型涡轮6以下第二固定板以上的空间隔离为内外两部分空间,其中外部空间为空气流通通道14,内部空间依次安装飞行控制箱9、各类传感器10、电池11和四个控制舵机13,所述飞行控制箱9内部装有无人机飞行控制器和自动驾驶仪,电池11和四个控制舵机13安装在第二固定板上;所述四个空气舵面12安装于无人机底部,其中两个对称安装于无人机外壳5内壁相对两侧,另外两个对称安装于无人机外壳5内壁的另外两侧,分别由四个控制舵机13单独控制。
所述第一固定板4,除了用于固定螺旋桨动力装置3的部分,其余部分采用中空结构,便于气流的流通。
在本发明的单旋翼无人机处于工作状态时,螺旋桨螺旋桨动力装置3为单螺旋桨1提供动力,由此产生无人机的升力(拉力),同时处于工作状态的单螺旋桨1将带动周围气流的运动,产生的气流将通过进气口15进入到无人机圆柱状机身5内部;小型涡轮6同时进行工作,对气流进入无人机圆柱状机身5内部起到辅助作用,不仅加大了进入机身内部的气流量,同时增强气流在无人机内部流动强度;位于无人机底部的四个独立的空气舵面13分别可以被四个控制舵机12单独控制,当其中一个或者多个空气舵面产生偏转时,机身内部的流动气流将在无人机底部对无人机产生一个不平衡的矢量力,无人机在这个矢量力作用下将向一定的方向发生偏转,从而实现单旋翼无人机飞行控制。
- 一种便携涵道式微小型单旋翼无人机
- 一种便携式微小型单旋翼无人机