智能鞋垫系统
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及鞋垫技术领域,尤其涉及一种智能鞋垫系统。
背景技术
随着社会老年人口的持续增加,跌倒监测与报警系统能够在老年人患者(如脑卒中、患有心血管、脑血管疾病或摔倒时头部触地等原因)发生跌倒行为时及时提供救护措施。
相关技术中,跌倒检测设备在运行时,通过内置陀螺仪监测用户重心的瞬时变化,当重心加速度达到阈值时判定用户跌倒并触发报警,但若用户跌倒过程缓慢,跌倒时的重心加速度一般不会超过阈值,也就无法触发报警,且设备储能方式有限,当设备使用时间过长,无法维持设备正常运行,导致对用户跌倒状态检测不及时,造成无法估量的损失。
发明内容
本发明提供一种智能鞋垫系统,用以解决现有技术中跌倒检测设备在用户缓慢跌倒时不能准确判断用户的跌倒行为,且设备的储能有限,无法为用户提供长时间的监测服务,导致对用户跌倒监测不及时的缺陷,提高了用户出行的安全性和能源利用效率。
本发明提供一种智能鞋垫系统,包括:
鞋垫本体;
姿态监测单元,所述姿态监测单元安装于所述鞋垫本体,所述姿态监测单元用于采集用户对所述鞋垫本体施加的压力数据和所述用户的位置信息,并根据预设的重心移动数据、所述压力数据和所述位置信息,得到所述用户的跌倒状态信息;
自供电机构,所述自供电机构安装于所述鞋垫本体,所述自供电机构与所述姿态监测单元电连接,所述自供电机构用于基于所述压力数据进行摩擦发电,得到第一电能,以及基于所述压力数据进行压电发电,得到第二电能,并基于所述第一电能和所述第二电能对所述姿态监测单元供电。
根据本发明提供的一种智能鞋垫系统,所述自供电机构包括:
复合发电装置,所述复合发电装置用于基于所述压力数据产生所述第一电能和所述第二电能;
自供能管理电路,所述自供能管理电路用户获取所述复合发电装置发送的所述第一电能和所述第二电能,将所述第一电能和所述第二电能转换为第三电能,所述第三电能用于对所述姿态监测单元进行直流供电。
根据本发明提供的一种智能鞋垫系统,所述自供电机构还包括:
锂电池,所述锂电池与所述自供能管理电路电连接,所述锂电池用于存储或释放所述第三电能。
根据本发明提供的一种智能鞋垫系统,所述复合发电装置包括:
底座腔体,所述底座腔体的一端开口;
弹性材料,所述弹性材料的一端与所述底座腔体的底部固定连接;
受压部件,所述受压部件设于所述底座腔体上,所述受压部件通过条形导轨与所述底座腔体活动连接,所述受压部件的外径与所述底座腔体的开口处的内径相同,所述受压部件基于所述压力数据进行摩擦发电,得到所述第一电能;
压电片,所述压电片的下表面与所述弹性材料背向所述底座腔体的底部的一端固定连接,所述压电片的上表面与所述受压部件接触,所述压电片的长度与所述受压部件的外径相同,所述压电片基于所述压力数据进行压电发电,得到所述第二电能。
根据本发明提供的一种智能鞋垫系统,所述姿态监测单元包括:
压力传感器,所述压力传感器用于采集所述压力数据;
定位器,所述定位器用于所述位置信息;
处理器,所述处理器分别与所述定位器和所述压力传感器电连接,所述处理器用于根据预设的重心移动数据、所述压力数据和所述位置信息,生成第一指令,所述第一指令用于表示所述跌倒状态信息。
根据本发明提供的一种智能鞋垫系统,所述智能鞋垫系统还包括:
通讯器,所述通讯器与所述姿态监测单元通信连接,所述通讯器用于将所述跌倒状态信息发送至外接电子设备。
根据本发明提供的一种智能鞋垫系统,所述压力传感器的材料为柔性材料,所述压力传感器安装于所述鞋垫本体的夹层中。
根据本发明提供的一种智能鞋垫系统,所述受压部件采用摩擦电极性为正的材料,所述受压部件的材料包括金属基材料、纤维材料和无机材料;
所述底座腔体采用摩擦电极性为负的材料,所述底座腔体的材料包括聚合物和聚合物基复合材料。
根据本发明提供的一种智能鞋垫系统,所述压电片采用具备正压电效应的材料,所述压电片的材料包括压电晶体、压电陶瓷、压电聚合物和压电复合材料。
根据本发明提供的一种智能鞋垫系统,所述底座腔体的材料还包括熔融沉积式材料或光固化3D打印材料。
本发明提供的智能鞋垫系统,通过在鞋垫本体上安装姿态监测单元,实现了对用户不同跌倒状态的实时监测,并通过设置自供电机构将用户施加在鞋垫本体的压力分别通过摩擦发电和压电发电两种方式转换为第一电能和第二电能,以维持姿态监测单元的正常运行,提高了用户出行的安全性和能源利用效率。
附图说明
为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明提供的智能鞋垫系统的结构示意图之一;
图2是本发明提供的智能鞋垫系统的结构示意图之二;
图3是本发明提供的复合发电装置的结构示意图之一;
图4是本发明提供的复合发电装置的结构示意图之二;
图5是本发明提供的复合发电装置的结构示意图之三;
图6是本发明提供的跌倒监测方法的流程示意图;
图7是本发明提供的压力传感器在鞋垫本体的分布示意图。
附图标记:
100:鞋垫本体;200:姿态监测单元;210:压力传感器;
220:定位器;230:处理器;300:自供电机构;
310:复合发电装置;311:底座腔体;3111:负电极;
312:弹性材料;313:受压部件;3131:正电极;
314:压电片;320:自供能管理电路;330:锂电池;
400:通讯器。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合图1-图7描述本发明的智能鞋垫系统。
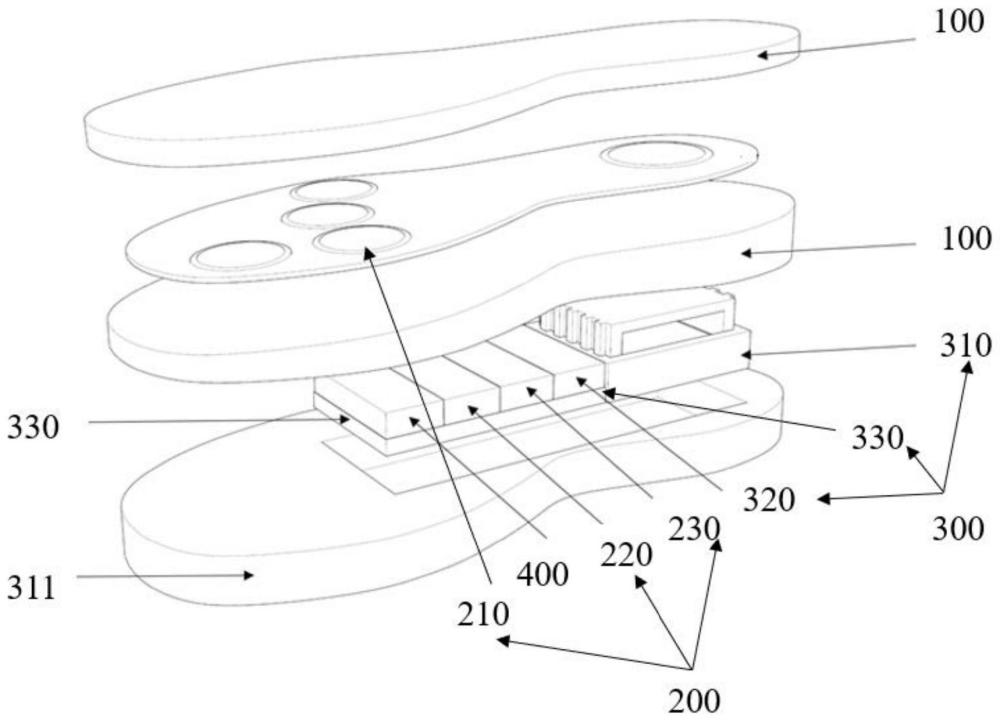
图1是本发明提供的智能鞋垫系统的结构示意图之一,如图1所示,本发明提供一种智能鞋垫系统,包括:鞋垫本体100、姿态监测单元200和自供电机构300。
在该实施例中,鞋垫本体100可以是包括多个夹层的鞋垫结构。
其中,姿态监测单元200安装于鞋垫本体100,姿态监测单元200用于采集用户对鞋垫本体100施加的压力数据和用户的位置信息,并根据预设的重心移动数据、压力数据和位置信息,得到用户的跌倒状态信息。
在该实施例中,姿态监测单元200中存储有与压力值关联的重心移动数据,用于根据用户施加在鞋垫本体100的压力大小确定用户重心的运动状态,再结合用户重心发生时对应的位置变化情况,准确获取出不同跌倒发生状况。
在该实施例中,用户外出活动时,若姿态监测单元200监测到鞋垫本体100受到的压力数据在较短时间内(如1s-2s范围内)变化为0值,说明用户可能发生突发性跌倒。
在该实施例中,用户外出活动时,若姿态监测单元200检测到鞋垫本体100受到的压力数据在缓慢降为0值,且根据实时获取的用户位置信息确定用户位置未发生变化时,确定用户发生缓慢跌倒。
其中,自供电机构300安装于鞋垫本体100,自供电机构300与姿态监测单元200电连接,自供电机构300用于基于压力数据进行摩擦发电,得到第一电能,以及基于压力数据进行压电发电,得到第二电能,并基于第一电能和第二电能对姿态监测单元200供电。
在该实施例中,鞋垫本体100上还安装有自供电机构300,用于将用户在行走时足底对鞋垫本体100施加的压力(机械能)转化为电能,并利用该电能为姿态监测单元200检测供电,保证姿态监测单元200的正常运行,进而实现能源的循环利用。
在该实施例中,自供电机构300将采集到的压力数据转化为电能的方式有两种,一种是摩擦发电,利用自供电机构300内活动连接装置之间的摩擦运动实现摩擦生电的过程。
需要说明的是,自供电机构300内活动连接装置之间的摩擦运动是由活动装置受到压力而引起的相对运动。
在该实施例中,另一种是压电发电,即自供电机构300内设有压电片314,压电片314受到压力后产生形变,引起正负电荷的相对运动,从而产生电信号。
本发明实施例提供的智能鞋垫系统,通过在鞋垫本体100上安装姿态监测单元200,实现了对用户不同跌倒状态的实时监测,并通过设置自供电机构300将用户施加在鞋垫本体100的压力分别通过摩擦发电和压电发电两种方式转换为第一电能和第二电能,以维持姿态监测单元200的正常运行,提高了用户出行的安全性和能源利用效率。
在一些实施例中,自供电机构300包括:复合发电装置310,复合发电装置310用于基于压力数据产生第一电能和第二电能;自供能管理电路320,自供能管理电路320用户获取复合发电装置310发送的第一电能和第二电能,将第一电能和第二电能转换为第三电能,第三电能用于对姿态监测单元200进行直流供电。
在该实施例中,复合发电装置310为同时实现摩擦发电和压电发电的装置,用于将用户对鞋垫本体100施加的压力通过两种生电方式转换为电能。
需要说明的是,复合发电装置310将机械转化为电能后,得到的是不稳定的交流电信号,不能直接用于对姿态监测单元200供电。
在该实施例中,自供能管理电路320用于将不稳定的交流电信号转换为直流电信号,可直接用于对姿态监测单元200供电。
图2是本发明提供的智能鞋垫系统的结构示意图之二,在图2所示的实施例中,自供能管理电路320包括俘能稳压电路和充/放电管理电路,俘能稳压电路和充/放电管理电路电连接;俘能稳压电路通过引入整流桥,并利用电路的整流作用将复合发电装置310提供的交流电信号转换为直流电信号,再将直流电信号输入至充/放电管理电路,充/放电管理电路能够满足储能设备的充电与放电,一方面源源不断地收集人运动时产生的能量供给储能设备,另一方面以储能设备作为稳定直流电的供给者保障各电子元件稳定运行,整体构成了自供能系统。
在该实施例中,储能设备可以是锂电池330等可充电电池。
在该的实施例中,俘能稳压电路包括整流电路、储能电路、电容器和DC-DC降压器,复合发电装置310将第一电能和第二电能发送至俘能稳压电路,经过整流和降压后得到第三电能(直流电信号)。
在该实施例中,第三电能可以直接用于向姿态监测单元200供电,还可以存储在储能设备。
本发明实施例提供的智能鞋垫系统,通过在自供电机构300中设置复合发电装置310,实现将用户对鞋垫本体100的压力数据通过两种发电方式转化为电能,在减少空间占用的同时,提升了能量利用率;通过设置自供能管理电路320将复合发电装置310获取的电能转换为直流电信号,实现了对姿态监测单元200的正常供电,延长了姿态监测单元200的工作时间,提升了姿态监测单元200的可持续监测能力。
在该实施例中,自供电机构300还包括:锂电池330,锂电池330与自供能管理电路320电连接,锂电池330用于存储或释放第三电能。
在该实施例中,锂电池330作为储能设备,用于与自供能管理电路320进行充电或放电的过程。
在图2所示的实施例中,锂电池330与自供能管理电路320中的充/放电管理电路电连接,自供能管理电路320产生的第三电能可以存储在锂电池330过程中,即锂电池330的充电过程;当复合发电装置310未接收到用户的压力数据时,锂电池330可以通过充/放电管理电路向姿态监测单元200供电,以维持其正常工作。
本发明实施例提供的智能鞋垫系统,通过设置锂电池330,在复合发电装置310正常工作时储存第三电能,在自供能管理电路320需要用电时释放第三电能,以保证姿态监测单元200长时间的正常工作,进而延长了对用户跌倒状态的监测时长,实用性强。
图3是本发明提供的复合发电装置310的结构示意图之一,如图3所示,复合发电装置310包括:底座腔体311,底座腔体311的一端开口;弹性材料312,弹性材料312的一端与底座腔体311的底部固定连接;受压部件313,受压部件313设于底座腔体311上,受压部件313通过条形导轨与底座腔体311活动连接,受压部件313的外径与底座腔体311的开口处的内径相同,受压部件313基于压力数据进行摩擦发电,得到第一电能;压电片314,压电片314的下表面与弹性材料312背向底座腔体311的底部的一端固定连接,压电片314的上表面与受压部件313接触,压电片314的长度与受压部件313的外径相同,压电片314基于压力数据进行压电发电,得到第二电能。
在该实施例中,压电片314通过压电效应将施加在压电片314的压力转换成可利用的电能,也可以是通过摩擦发电的方式将受压部件313受挤压前后产生的摩擦力转换为电能,还可以是压电发电和摩擦发电的组合形式将压力和摩擦力转换为电能,以提高能源的利用率。
在该实施例中,弹性材料312可以是弹簧。
在该实施例中,压电片314与弹性材料312和受压部件313保持可拆卸链接,更换压电片314时,只需向上取出受压部件313,便可方便更换压电片314。
图4是本发明提供的复合发电装置310的结构示意图之二,在图4所示的实施例中,受压部件313和底座腔体311分别设有正电极3131和负电极3111,受压部件313接收用户压力时,通过条形导轨与底座腔体311在边缘进行相对运动,运动过程中产生摩擦力,通过摩擦生电效应,受压部件313和底座腔体311表面产生正负电荷,并通过正电极3131和负电极3111得到第一电能;另外,受压部件313接收用户压力时,压电片314产生形变,再利用弹簧的支撑,压电片314在恢复形变时根据压电效应得到第二电能。
图5是本发明提供的复合发电装置310的结构示意图之三,在图5所示的实施例中,受压部件313受到用户足部压力时,压电片314与受压部件313相接触的两端受力向下弯折,用户做出抬脚动作时外力消失,压缩后的弹簧释放弹力向上作用于压电材料,装置恢复为初始状态,通过在人行走过程中重复上述动作,利用压电效应,实现循环供电过程。
在该实施例中,在弹簧受到外界压力而发生形变过程中,受压部件313通过条形导轨与底座腔体311相对运动时会产生摩擦力,通过摩擦发电的方式获取额外的电能,并通过正电极3131和负电极3111将摩擦产生的电能输出至锂电池330进行保存。
根据本发明实施例提供的智能鞋垫系统,通过将受压部分与底座腔体311的滑动连接部分设为条形导轨结构实现摩擦发电,并通过压电片314实现压电发电,实现了摩擦发电和压电发电相结合的复合发电,提高自供电机构300的发电能力,且结构设计简单,降低了成本。
在一些实施例中,姿态监测单元200包括:压力传感器210,压力传感器210用于采集压力数据;定位器220,定位器220用于位置信息;处理器230,处理器230分别与定位器220和压力传感器210电连接,处理器230用于根据预设的重心移动数据、压力数据和位置信息,生成第一指令,第一指令用于表示跌倒状态信息。
在该实施例中,压力传感器210、定位器220、处理器230均可以按用户需求自定义设置在鞋垫本体100的夹层中的指定区域,优化对鞋垫的占用面积,同时避免与用户足底直接接触。
在该实施例中,压力传感器210可以是压阻式压力传感器、压电式压力传感器或电容式压力传感器。
在一些实施例中,定位器220可以是GPS(Global Positioning System,全球定位系统)、北斗、GLONASS(GLOBAL NAVIGATION SATELLITE SYSTEM,全球卫星导航系统)、Galileo(Galileo satellite navigation system,伽利略卫星导航系统)等具有精准定位功能的设备或芯片。
在该实施例中,处理器230中存储有与压力值关联的重心移动数据,用于根据压力传感器210发送的压力数据大小确定用户重心的运动状态,再结合用户重心发生变化的过程中的位置变化情况,准确检测出不同跌倒发生状况。
在该实施例中,用户外出活动时,若处理器230检测到压力传感器210实时发送的压力数据在较短时间内(如1s-2s范围内)变化为0值,说明用户可能发生突发性跌倒。
在该实施例中,用户外出活动时,若处理器230检测到压力传感器210实时发送的压力数据在缓慢降为0值,且根据定位器220实施提供的定位信息确定用户位置未发生变化时,确定用户发生缓慢跌倒。
图6是本发明提供的跌倒监测方法的流程示意图,在图6所示的实施例中,处理器230接收压力传感器210发送的压力数据和定位器220发送的GPS信息,根据与压力值关联的重心移动数据判断实时接收的压力数据对应的重心值是否达到预设的重心阈值,若达到重心阈值(对应重心变化异常),检测用户足底压力是否降到低值,如0值附近,若是,则检测30s内足底压力是否仍在低值,若是,最后根据GPS信息判断用户的实时位置是否发生变化,若未发生变化,则说明用户发生缓慢跌倒,并进行报警。
在该实施例中,若实时接收的压力数据对应的重心值未达到预设的重心阈值,则不进行后续处理,继续采集下一时刻的压力数据和GPS信息进行用户跌倒监测。
在该实施例中,若实时接收的压力数据对应的重心值达到预设的重心阈值,但根据GPS信息判断用户的实时位置发生了变化,不进行报警处理,继续采集下一时刻的压力数据和GPS信息进行用户跌倒监测。
根据本发明实施例提供的智能鞋垫系统,通过将压力传感器210采集的压力数据和定位器220采集的定位信息进行对比分析,利用人体突然失去平衡时的重心移动数据与足底压力值变化的映射关系以及用户位置信息的变化情况来检测用户跌倒状态,能够准确识别用户发生突发跌倒和缓慢跌到的行为,提高了对用户跌倒监测的准确率。
在该实施例中,智能鞋垫系统还包括:通讯器400,通讯器400与姿态监测单元200通信连接,通讯器400用于将跌倒状态信息发送至外接电子设备。
在该实施例中,通讯器400可以是物联网无线通信设备。
在该实施例中,通讯器400接收第一指令,并将第一指令通过发射天线发送至外接电子设备,外接电子设备的接收端接收第一指令后,能够获取用户的跌倒状态。
在该实施例中,跌倒状态包括用户发生突发跌倒或缓慢跌倒,还包括用户的实时位置信息。
在图2所示的实施例中,处理器230(对应数据处理模块)接收定位器220(对应GPS模块)发送的位置信息和压力传感器210(对应压力传感器210模块)发送的压力数据,得到用户的状态信息(跌倒状态和位置信息),并将状态信息发送至通讯器400(对应物联网无线通信模块),通讯器400通过天线将状态信息发送至外接电子设备(对应移动端);自供电机构300为处理器230提供直流电。
在一些实施例中,处理器230确认用户处于跌倒状态时,向通讯器400发送报警信息,通讯器400将报警信息通过天线发送至外接电子设备,实现对外接电子设备端的用户进行报警提示。
根据本发明实施例提供的智能鞋垫系统,通过在智能鞋垫系统中设置通讯器400,便于将用户的跌倒状态和位置信息发送至远程用户,便于远程用户及时了解智能鞋垫系统处的用户的运动状态,提高了对用户跌倒状态的监测效率。
在该实施例中,压力传感器210的材料为柔性材料,压力传感器210安装于鞋垫本体100的夹层中。
在该实施例中,压力传感器210可以采用柔性材料制备,柔性材料具有柔软、低模量、易变形等属性,例如,柔性材料可以是聚二甲基硅氧烷(PDMS)、聚对苯二甲酸乙二酯(PET)、聚酰亚胺(PI)、聚乙烯(PE)或聚氨酯(PU)等。
在该实施例中,柔性基底上嵌入压力传感器210,并将整体植入到EVA材质的缓冲夹层中,阻止足部与传感器的直接接触以保护传感器,来制作足底压力分布测量鞋垫。
在该实施例中,压力传感器210可以是片状结构,压力传感器210可以设于鞋垫本体100的脚跟垫部或脚掌垫部。
图7是本发明提供的压力传感器210在鞋垫本体100的分布示意图,在图7所示的实施例中,鞋垫本体100的脚跟垫部设置一个压力传感器210(对应5),而脚掌垫部设置4个压力传感器210(对应1-4),共计采用5个压力传感器210来实时采集用户的足部压力数据。
根据本发明实施例提供的智能鞋垫系统,通过采用柔性材料制备压力传感器210,并将其安装于鞋垫本体的夹层中的脚跟垫部和脚掌垫部,减少对鞋垫本体夹层空间的占用,同时也能提高采集的用户足面压力数据的准确率。
在一些实施例中,受压部件313采用摩擦电极性为正的材料,受压部件313的材料包括金属基材料、纤维材料和无机材料;底座腔体311采用摩擦电极性为负的材料,底座腔体的材料包括聚合物和聚合物基复合材料。
在该实施例中,受压部件313的材料可以是摩擦纳米发电材料,如铝、金和铜等,由于其优良的电子给体特性,通常作为一种易带正电荷的材料。
在该实施例中,底座腔体311的材料主要是特定的聚合物材料,如聚乙烯、聚乙烯亚胺、聚苯乙烯、聚氯乙烯、聚碳酸酯、聚氨酯、聚二甲基硅氧烷、聚对苯二甲酸乙二醇酯、聚三氟氯乙烯、聚四氟乙烯、氟化乙丙橡胶、聚酰亚胺及聚合物基复合材料,通常作为一种易带负电荷的材料。
在该实施例中,受压部件313与底座腔体311均采用摩擦材料构成摩擦纳米发电结构,并通过条形导轨接触面在上下滑动的过程中摩擦发电,最后通过正电极3131和负电极3111形成第一电能。
根据本发明实施例提供的智能鞋垫系统,通过将受压部件313与底座腔体311的活动连接部分采用摩擦材料制备,提高了摩擦发电能力。
在一些实施例中,压电片314采用具备正压电效应的材料,压电片314的材料包括压电晶体、压电陶瓷、压电聚合物和压电复合材料。
在该实施例中,压电片314可以是锆钛酸铅、钛酸钡、钛酸铋钠、铌酸钾、铌酸锂、铁酸铋、聚偏氟乙烯PVDF及其共聚物(如聚偏氟乙烯-六氟丙烯共聚物,聚偏氟乙烯-三氟乙烯共聚物)、聚氟乙烯、聚氧乙烯、聚碳酸酯,及压电聚合物与压电陶瓷粉末混合制备的压电复合材料等。
需要说明的是,压电片314的材料分为四种类型:压电晶体、压电陶瓷、压电聚合物和压电复合材料,压电材料的性能是压电效应生电关键,在压电材料的多项参数中,介电常数ε、机电耦合系数K以及压电应变常数d共同决定压电材料的性能,首先是介电常数ε,它代表了压电材料极化性能的强弱,对于压电材料而言,介电常数越大,就可以溢出更多的自由电荷,因此就具有更好的性能;机电耦合系数K表示能量转化过程中机械能与电能之间的转化比例,机电耦合系数K越高,代表转化机械能的能力越强;压电应变常数d表示压电材料将机械能转化为电能的能力,压电应变常数d越高说明其将机械能转化为电能的能力越强。
在该实施例中,PZT具有较高的压电常数和介电常数,而且结构比较稳定,可用于制备压电材料;聚偏二氟乙烯(PVDF)是一种多晶体聚合物材料,PVDF具有优异的耐化学性和生物相容性,对于压电式自供能技术来说,需要介电常数E、机电耦合系数K以及压电应变常数d都较大的材料,则可选用PZT和PVDF可作为压电式自供能装置材料。
根据本发明实施例提供的智能鞋垫系统,通过选用PZT或PVDF制备压电,复合发电装置310通过压电效应生电的能力。
在一些实施例中,底座腔体311的材料还包括熔融沉积式材料或光固化3D打印材料。
需要说明的是,制备底座腔体311时可以运用3D打印技术进行批量打印。
在该实施例中,采用3D打印技术底座腔体311具有如下优点:
(1)设计空间无限,3D打印将物体分解成一层一层的2D区域,因此加工任意复杂的物体都没有问题,加工精度只是取决于打印机所能输出的最小材料颗粒,通过3D打印技术打印底座腔体311能让设计者设计任意复杂的几何形状,设计空间无限。
(2)零技能制造,传统的制造工艺设备庞大且昂贵,需要较高的技能才能进行操作。而3D打印机(比如FDM 3D打印机)小巧而廉价,有些已经进入家庭,使用简单方便,相对于昂贵的铸模,3D打印只需要一个数字化文件即可进行成型,通过3D打印技术打印底座腔体311能够轻松实现鞋垫的个性化设计与定制,缩短研发时间。
(3)材料无限组合,多喷头的3D打印机能够对多种材料进行组合打印。通过材料的堆叠和组合,打印的物品具有与单一材料所不同的物理和力学的特性,通过不同材料的组合,可以产生性能不同的"新的材料",即通过3D打印控制材料的分布来控制物品的物理、力学及结构的特性,从而能产生多样化的物品,增加产品的灵活性。
在该实施例中,熔融沉积式(FDM)材料热塑性材料,以丝状供料,该材料在喷头内被加热熔化,喷头沿零件截面轮廓和填充轨迹运动,同时将熔化的材料挤出,材料迅速固化,并与周围的材料粘结;每一个层均在前一层的基础上堆积,前一层对当前层起到定位和支撑的作用;FDM热塑性塑料能够满足对于高度要求配合紧密性、韧度和环境耐受性或特殊性质(如静电消散、半透明度、生物相容性、VO可燃性和FST评级方面)的应用;可使用PLA、ABS、TPU等材料。
PLA是一种可生物降解的热塑性塑料,来源于可再生资源,比如玉米,甜菜,木薯和甘蔗;因此,基于PLA的3D打印材料比其他塑料材料更加环保。
ABS也是一种热塑性塑料,其造价便宜,耐用性强,有弹性,质量轻,容易挤出,非常适合用于3D打印。
TPU(热塑性聚氨酯)具备一定的柔软和韧性,适合需要类橡胶性能的零件,TPU具有很大的弹性,可以反复拉伸,移动和冲击而不会磨损或降解。
在该实施例中,光固化3D打印技术是通过计算机控制紫外光束选择性的对光敏树脂进行逐层固化,并控制平台于z轴方向上的位移,在上一层固化层上进行下一层光敏树脂的固化,进而完成3D打印制件的制作,光固化3D打印具有高光敏性、能耗小、成本低、精度高、表面光滑以及可重复性好等优点,已经开始广泛应用于航空航天、汽车、模具制造、珠宝设计和医疗等领域。
利用光固化3D打印技进行3D打印时,选用的材料为光敏树脂,初始状态是液体,通过紫外光的照射固化成型。光敏树脂材料有很多可选项,从颜色,透明度到硬度。优点:打印模型表面光滑、精度高、具有防水防湿特性,打印模型后期可进行喷漆、丝印、电镀等后处理工艺。
在该实施例中,利用熔融沉积式材料或光固化3D打印材料制备底部腔体,使之具有一定机械强度保护电路的同时实现个性化定制。
根据本申请实施例提供的智能鞋垫系统,通过熔融沉积式材料或光固化3D打印材料制备底部腔体,实现了对底部腔体的多样化设计,提升了底部腔体的制备效率。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。