一种多旋翼无人机隧洞悬停方法及系统
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及多旋翼无人机定位领域,尤其是涉及一种多旋翼无人机隧洞悬停方法及系统。
背景技术
多旋翼无人机作为一种可以悬停的无人机,在科学考察、防灾救险、大型建筑检修中有着大量的应用,一般情况下,无人机的悬停使用的是GPS+气压计+IMU的组合导航方法,GPS和气压计可以确定无人机的水平位置与高度,惯性测量单元IMU可以识别自身的飞行状态和相对位移,实现水平位置和高度的锁定。
隧洞为大型水利工程中的输水管道,截面面积大,长度长,而且一般内部环境阴暗潮湿,无法安装传感器或者室内定位装置,隧洞内也没有无人机悬停所需要的GPS信号和地磁信号。
由于隧洞中没有GPS信号,因此无法使用GPS+气压计+IMU的组合导航方法实现无人机在隧洞内的悬停,而一般的室内导航技术,需要额外搭建通讯基站,但在隧洞中布置额外的基站,耗时长,工程量大,成本高,因此很难实现。此外,无人机绝对定位也有采用光流传感器,通过视觉进行悬停控制,但由于隧洞中环境特殊,几乎没有光照,底部环境复杂,可能有不稳定的水流,故无法通过光流模块对无人机进行定位。因此,需要一种可以应用于隧洞的多旋翼悬停方法。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种多旋翼无人机隧洞悬停方法及系统,将悬停任务分为水平定位任务和垂直定高任务,水平定位依靠水平激光雷达和IMU得到水平速度与水平位置,垂直定高先选择垂直高度数据,再结合垂直高度数据和IMU得到垂直速度与垂直高度,结合悬停信息,通过PID串级控制得到无人机的飞行参数,实现了无人机在无GPS信号、无地磁信号的隧洞中的高精度悬停。
本发明的目的可以通过以下技术方案来实现:
一种多旋翼无人机隧洞悬停方法,所述多旋翼无人机上包括无人机本体、控制器、水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计,所述悬停方法包括以下步骤:
S1、获取水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计的测量数据,获取悬停信息,所述悬停信息包括悬停水平位置和悬停高度;
S2、使用滤波算法将水平激光雷达的测量数据与IMU的测量数据进行融合,得到水平位置和水平速度,基于悬停水平位置、水平位置和水平速度得到第一飞行参数;
S3、基于水平速度和预设置的速度阈值,自对地激光测距传感器的测量数据、对空激光测距传感器的测量数据和气压计的测量数据中得到垂直高度数据;
S4、使用滤波算法将垂直高度数据与IMU的测量数据进行融合,得到垂直高度和垂直速度,基于悬停高度、垂直高度和垂直速度得到第二飞行参数;
S5、控制器基于第一飞行参数和第二飞行参数对无人机本体进行控制。
进一步的,步骤S3具体过程如下:
如果水平速度大于等于预设置的速度阈值,则基于气压计的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,且隧洞地面在对地激光测距传感器的测量范围内,则基于对地激光测距传感器的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,隧洞地面不在对地激光测距传感器的测量范围内,且隧洞顶面在对空激光测距传感器的测量范围内,则基于对空激光测距传感器的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,隧洞地面和隧洞顶面不在对地激光测距传感器和对空激光测距传感器的测量范围内,则基于气压计的测量数据得到垂直高度数据。
进一步的,步骤S2中,使用扩展卡尔曼滤波算法将水平激光雷达的测量数据与IMU的测量数据进行融合。
进一步的,步骤S4中,使用扩展卡尔曼滤波算法将垂直高度数据与IMU的测量数据进行融合。
进一步的,步骤S2中,基于悬停水平位置、水平位置和水平速度通过PID串级控制得到第一飞行参数,所述PID串级控制包括外环控制和内环控制,所述外环控制为水平位置环,根据悬停水平位置和水平位置得到目标水平速度,所述内环控制为速度环,根据目标水平速度和水平速度得到第一飞行参数。
更进一步的,所述第一飞行参数为无人机本体的姿态信号。
进一步的,步骤S4中,基于悬停高度、垂直高度和垂直速度通过PID串级控制得到第二飞行参数,所述PID串级控制包括外环控制和内环控制,所述外环控制为垂直高度环,根据悬停高度和垂直高度得到目标垂直速度,所述内环控制为速度环,根据目标垂直速度和垂直速度得到第二飞行参数。
更进一步的,所述第二飞行参数为油门信号。
一种多旋翼无人机隧洞悬停系统,包括:传感器模块、水平定位模块、垂直定高模块和控制模块,所述传感器模块包括水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计;
所述控制模块获取无人机的悬停信息,悬停信息包括悬停水平位置和悬停高度;
所述控制模块获取水平激光雷达和IMU的测量数据并将其发送至水平定位模块,所述水平定位模块使用滤波算法将水平激光雷达的测量数据和IMU的测量数据进行融合,得到水平位置和水平速度,基于悬停水平位置、水平位置和水平速度得到第一飞行参数并将其传输至控制模块;
所述控制模块获取对地激光测距传感器、对空激光测距传感器和气压计的测量数据,根据预设置的速度阈值得到垂直高度数据并将其发送至垂直定高模块,所述垂直定高模块使用滤波算法将垂直高度数据与IMU的测量数据进行融合,得到垂直高度和垂直速度,基于悬停高度、垂直高度和垂直速度得到第二飞行参数并将其传输至控制模块;
所述控制模块基于第一飞行参数和第二飞行参数进行多旋翼无人机的飞行控制。
进一步的,所述水平定位模块基于悬停水平位置、水平位置和水平速度通过PID串级控制得到第一飞行参数;所述垂直定高模块基于悬停高度、垂直高度和垂直速度通过PID串级控制得到第二飞行参数。
与现有技术相比,本发明具有以下有益效果:
(1)将悬停任务分为水平定位任务和垂直定高任务,水平定位依靠水平激光雷达和IMU得到水平速度与水平位置,垂直定高先选择垂直高度数据,再结合垂直高度数据和IMU得到垂直速度与垂直高度,结合悬停信息,通过PID串级控制得到无人机的飞行参数,实现了无人机在无GPS信号、无地磁信号的隧洞中的高精度悬停。
(2)在选择垂直高度数据时,考虑到气压计、对地激光测距传感器和对空激光测距传感器的优缺点,设置了速度阈值,根据水平速度与速度阈值的大小关系,自气压计、对地激光测距传感器和对空激光测距传感器的测量数据中得到垂直高度数据,适用于多种飞行情况,能够得到精度更高的垂直高度数据。
(3)得到水平位置和水平速度后,通过PID串级控制,在外环得到目标水平速度,在内环得到姿态信号,根据姿态信号进行无人机的飞行控制;得到垂直高度和垂直速度后,通过PID串级控制,在外环得到目标垂直速度,在内环得到油门信号,根据油门信号进行无人机的飞行控制;PID串级控制提升了控制的精度和抗干扰性。
附图说明
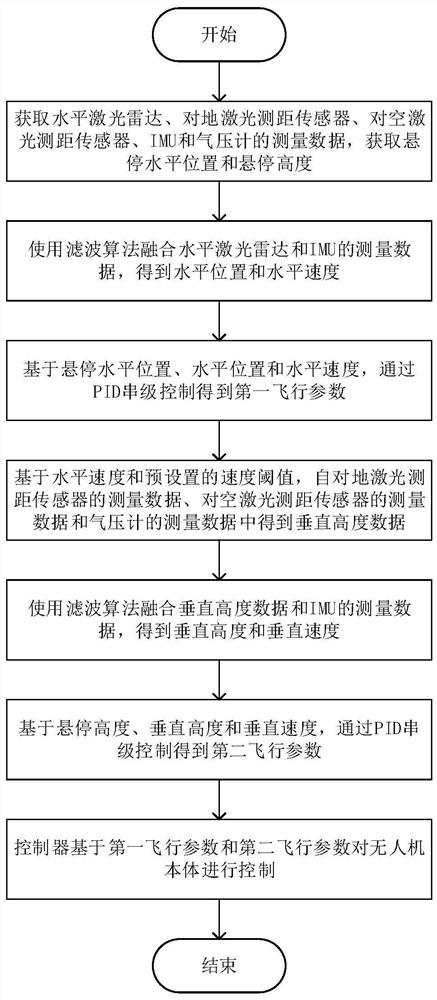
图1为悬停方法的流程图;
图2为水平定位任务框图;
图3为垂直高度数据选择的流程图;
图4为垂直定高任务框图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1:
一种多旋翼无人机隧洞悬停方法,多旋翼无人机上包括无人机本体、控制器、水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计。
隧洞中的环境较为复杂特殊,无法接收GPS,GNSS信号,无地磁信号,隧洞内部光线极差,传统的通过视觉传感器无法有效工作,故常规的无人机悬停方法无法在隧洞无人机上工作。本申请在无人机本体上水平安装360度激光雷达、对地单点激光测距仪、对空单点激光测距仪、IMU和气压计,通过这些传感器实现多旋翼无人机的悬停,如图1所示,悬停方法包括以下步骤:
S1、获取水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计的测量数据,获取悬停信息,悬停信息包括悬停水平位置和悬停高度;
多旋翼无人机的悬停任务就是在悬停水平位置和悬停高度处悬停。本申请将悬停任务分为水平定位任务和垂直定高任务,分别进行水平上的定位和垂直上的定高,提升了悬停控制精度,水平定位任务为步骤S2,垂直定高任务为步骤S3至S4。
水平定位任务:
S2、使用滤波算法将水平激光雷达的测量数据与IMU的测量数据进行融合,得到水平位置和水平速度,基于悬停水平位置、水平位置和水平速度得到第一飞行参数;
具体的,滤波算法为扩展卡尔曼滤波算法,基于悬停水平位置、水平位置和水平速度通过PID串级控制得到第一飞行参数,PID串级控制包括外环控制和内环控制,外环控制为水平位置环,根据悬停水平位置和水平位置得到目标水平速度,内环控制为速度环,根据目标水平速度和水平速度得到第一飞行参数,第一飞行参数为无人机本体的姿态信号。通过姿态信号进行无人机的飞行控制是现有技术,飞行控制为本领域常用的技术手段,故不再赘述。
水平定位任务的框图如图2所示,通过水平激光雷达获得水平方向上障碍的位置信息,通过扩展卡尔曼滤波对水平激光雷达的测量数据与IMU的测量数据进行融合,可以获得高精度的水平位置和水平速度,结合悬停水平位置,通过PID串级控制可以实现高精度高抗干扰能力的水平定位。
垂直定高任务:
S3、基于水平速度和预设置的速度阈值,自对地激光测距传感器的测量数据、对空激光测距传感器的测量数据和气压计的测量数据中得到垂直高度数据;
在确定垂直高度数据时,IMU不受外界环境干扰,但是其只能测量无人机本体的加速度和角速度,通过积分实现对无人机的速度和高度的估计,无法直接测量高度,因此精度较差,容易受到传感器漂移和误差累积带来的影响。气压计频率低,计算高度会受到环境温度的影响,同时不稳定的气流也会对气压计读数带来巨大的影响,在隧洞中,结构可能较为复杂,气流混乱,影响气压计的精度。对地激光测距传感器和对空激光测距传感器的精度和频率较高,但受地形和地表类型影响较大。因此,为了尽可能得到可靠的垂直高度数据,本申请设置了速度阈值,垂直高度数据选择的流程图如图3所示。
如果水平速度大于等于预设置的速度阈值,则基于气压计的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,且隧洞地面在对地激光测距传感器的测量范围内,则基于对地激光测距传感器的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,隧洞地面不在对地激光测距传感器的测量范围内,且隧洞顶面在对空激光测距传感器的测量范围内,则基于对空激光测距传感器的测量数据得到垂直高度数据;
如果水平速度小于预设置的速度阈值,隧洞地面和隧洞顶面不在对地激光测距传感器和对空激光测距传感器的测量范围内,则基于气压计的测量数据得到垂直高度数据。
当水平速度过大时,高速气流影响气压计的测量精度,因此,优先使用对地激光测距传感器,当对地激光测距传感器超过范围后,再使用对空激光测距传感器,如果对空激光测距传感器也超过范围,则再使用气压计;速度阈值可以根据实际工程经验设置,这样得到的垂直高度数据可靠性更高。
S4、使用滤波算法将垂直高度数据与IMU的测量数据进行融合,得到垂直高度和垂直速度,基于悬停高度、垂直高度和垂直速度得到第二飞行参数;
具体的,滤波算法为扩展卡尔曼滤波算法,基于悬停高度、垂直高度和垂直速度通过PID串级控制得到第二飞行参数,PID串级控制包括外环控制和内环控制,外环控制为垂直高度环,根据悬停高度和垂直高度得到目标垂直速度,内环控制为速度环,根据目标垂直速度和垂直速度得到第二飞行参数,第二飞行参数为油门信号。
垂直定高任务的框图如图4所示,先选择可靠的垂直高度数据,通过扩展卡尔曼滤波对垂直高度数据与IMU的测量数据进行融合,可以得到准确的无人机的垂直高度和垂直速度,结合悬停高度,通过PID串级控制,实现多旋翼无人机的高精度垂直高度控制。
S5、控制器基于第一飞行参数和第二飞行参数对无人机本体进行控制。
一种多旋翼无人机隧洞悬停系统,包括:传感器模块、水平定位模块、垂直定高模块和控制模块,传感器模块包括水平激光雷达、对地激光测距传感器、对空激光测距传感器、IMU和气压计;
控制模块获取无人机的悬停信息,悬停信息包括悬停水平位置和悬停高度;
控制模块获取水平激光雷达和IMU的测量数据并将其发送至水平定位模块,水平定位模块使用滤波算法将水平激光雷达的测量数据和IMU的测量数据进行融合,得到水平位置和水平速度,基于悬停水平位置、水平位置和水平速度通过PID串级控制得到第一飞行参数并将其传输至控制模块;
控制模块获取对地激光测距传感器、对空激光测距传感器和气压计的测量数据,根据预设置的速度阈值得到垂直高度数据并将其发送至垂直定高模块,垂直定高模块使用滤波算法将垂直高度数据与IMU的测量数据进行融合,得到垂直高度和垂直速度,基于悬停高度、垂直高度和垂直速度通过PID串级控制得到第二飞行参数并将其传输至控制模块;
控制模块基于第一飞行参数和第二飞行参数进行多旋翼无人机的飞行控制。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。