电子设备及其跌落保护方法
文献发布时间:2023-06-19 13:29:16
技术领域
本公开涉及电子设备技术领域,具体而言,涉及一种电子设备及其跌落保护方法。
背景技术
随着技术的发展和进步,人们对电子设备的功能要求越来越高。为了实现更多的功能,在电子设备中往往设置有多种传感器,传感器中可以包括微机电系统(MEMS,Micro-Electro-Mechanical System)。微机电系统是一种精密的器件,在电子设备意外跌落时容易损坏微机电系统。
需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
发明内容
本公开的目的在于提供一种电子设备及其跌落保护方法,进而至少在一定程度上避免电子设备跌落时损坏传感器。
根据本公开的一个方面,提供一种电子设备,所述电子设备包括:
传感器,所述传感器具有微机电系统;
检测模组,所述检测模组用于确定所述电子设备是否处于跌落状态;
供电模组,所述供电模组分别连接所述传感器和所述检测模组;
控制模组,所述控制模组分别和所述供电模组及所述传感器连接,所述控制模组控制所述供电模组在所述电子设备处于跌落状态时停止向所述传感器供电,以关断所述微机电系统。
根据本公开的另一个方面,提供一种电子设备的跌落保护方法,所述电子设备包括传感器,所述传感器具有微机电系统,所述方法包括:
利用检测模组确定电子设备是否处于跌落状态,所述检测模组设于所述电子设备;
当所述电子设备处于跌落状态时,控制供电模组停止向所述传感器供电,所述供电模组设于所述电子设备。
本公开实施例提供的电子设备,通过检测模组检测电子设备是否处于跌落状态,当电子设备处于跌落状态时,控制模组控制供电模组停止向传感器供电,从而关断微机电系统,避免了微机电系统在工作时受到跌落冲击,降低了传感器由于跌落而损坏的风险,提高了电子设备内传感器的稳定性。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
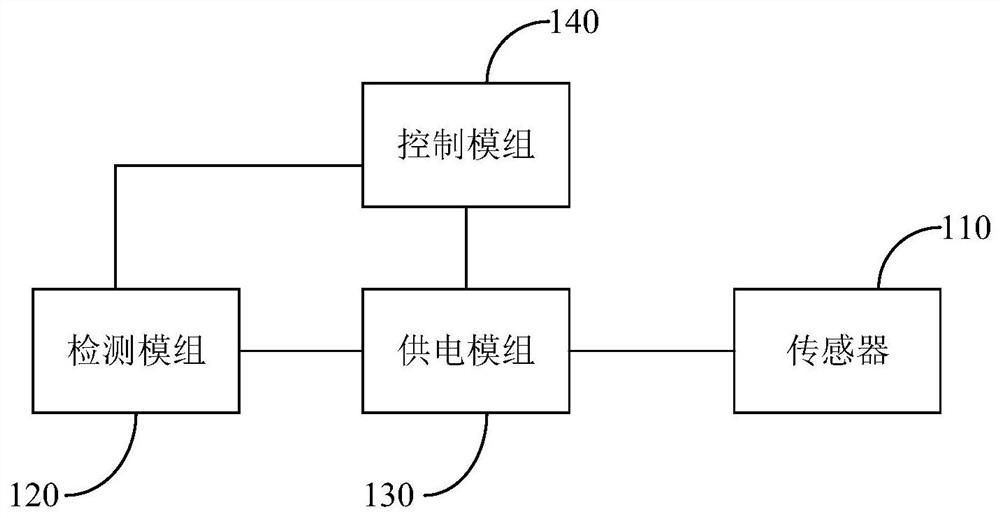
图1为本公开示例性实施例提供的第一种电子设备的示意框图;
图2为本公开示例性实施例提供的一种电子设备的爆炸示意图;
图3为本公开示例性实施例提供的第二种电子设备的示意框图;
图4为本公开示例性实施例提供的第三种电子设备的示意框图;
图5为本公开示例性实施例提供的第四种电子设备的示意框图;
图6为本公开示例性实施例提供的第五种电子设备的示意框图;
图7为本公开示例性实施例提供的第六种电子设备的示意框图;
图8为本公开示例性实施例提供的第七种电子设备的示意框图;
图9为本公开示例性实施例提供的第八种电子设备的示意框图;
图10为本公开示例性实施例提供的第一种电子设备的跌落保护方法的流程图;
图11为本公开示例性实施例提供的第二种电子设备的跌落保护方法的流程图。
具体实施方式
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。
虽然本说明书中使用相对性的用语,例如“上”“下”来描述图标的一个组件对于另一组件的相对关系,但是这些术语用于本说明书中仅出于方便,例如根据附图中所述的示例的方向。能理解的是,如果将图标的装置翻转使其上下颠倒,则所叙述在“上”的组件将会成为在“下”的组件。当某结构在其它结构“上”时,有可能是指某结构一体形成于其它结构上,或指某结构“直接”设置在其它结构上,或指某结构通过另一结构“间接”设置在其它结构上。
本公开示例性实施例首先提供一种电子设备,如图1所示,该电子设备包括:传感器110、检测模组120、供电模组130和控制模组140,传感器110具有微机电系统;检测模组120用于确定电子设备是否处于跌落状态;供电模组130分别连接传感器110和检测模组120;控制模组140分别和供电模组130及传感器110连接,控制模组140控制供电模组130在电子设备处于跌落状态时停止向传感器110供电,以关断微机电系统。
本公开实施例提供的电子设备,通过检测模组120检测电子设备是否处于跌落状态,当电子设备处于跌落状态时,控制模组140控制供电模组130停止向传感器110供电,从而关断微机电系统,避免了微机电系统在工作时受到跌落冲击,降低了传感器110由于跌落而损坏的风险,提高了电子设备内传感器110的稳定性。
本公开实施例提供的电子设备可以是手机、平板电脑、笔记本电脑、电子阅读器和智能手表等具有传感器110的电子设备。下面以手机为例对本公开实施例提供的电子设备的各部分进行详细说明:
在本公开实施例中,传感器110、检测模组120、供电模组130和控制模组140设于电子设备的设备主体。
其中,如图2所示,设备主体可以包括显示屏10、边框20、主板30、电池40和后盖50,显示屏10设于边框20,显示屏10用于形成终端设备的前壳。后盖50设于边框20远离显示屏10的一侧,显示屏10、边框20和后盖50形成容置空间,主板30和电池40设于容置空间。
显示屏10可以是OLED显示屏10或者LCD显示屏10,显示屏10用于显示图像或者文本等信息。显示屏10和显示驱动电路连接,显示驱动电路用于向显示屏10输出显示驱动信号,显示屏10在显示驱动信号的驱动下显示图像或者文本信息。本公开实施例中,终端设备采集到的目标物体的色彩可以在显示屏10上以文本或者图像的形式显示。
边框20可以是金属边框20、塑料边框20或者玻璃边框20等,边框20可以包括框体及中框,框体用于形成边框20轮廓。中框和框体连接,中框从框体延伸至终端设备的内部,中框用于固定显示屏10、主板30和电池40等器件。当边框20为金属边框20时,终端设备的天线可以设于边框20。比如,金属边框20被分割为多个金属枝节,每个金属枝节为一个天线辐射体。
主板30可以安装在边框20上,并随边框20一同收容在上述容置空间中。主板30上设置有接地点,以实现主板30的接地。主板30上可以集成有马达、麦克风、扬声器、受话器、耳机接口、通用串行总线接口(USB接口)、摄像头、接近传感器110、环境光传感器110、陀螺仪以及处理器等功能模块中的一个或多个。
其中,传感器110、检测模组120、供电模组130和控制模组140可以设于主板30。传感器110中具有微机电系统,微机电系统在电子设备开机后处于工作状态。供电模组130可以是主板30上的电源管理电路。
当然在实际应用中,电子设备中还可以设置有小板,传感器110、检测模组120、供电模组130和控制模组140中的一个或者多个也可以设置于小板,本公开实施例对此不做具体限定。
电池40安装在上述容置空间内部。例如,电池40可以安装在边框20上,并随边框20一同收容在上述容置空间中。电池40可以电连接至主板30,以实现电池40为终端设备供电。其中,主板30上可以设置有电源管理电路。电源管理电路用于将电池40提供的电压分配到终端设备中的各个电子元件。
后盖50用于形成终端设备的外部轮廓。后盖50可以一体成型。在后盖50的成型过程中,可以在后盖50上形成后置摄像头孔、指纹识别模组安装孔等结构。后盖50上设置有镜头区,闪光灯和镜头可以安装于后盖50的镜头区。
传感器110为MEMS传感器,比如,传感器110可以是气压计、加速度传感器或者陀螺仪等。传感器110内部具有可活动结构,在电子设备处于开机状态时,该可活动结构处于通电状态。也即是微机电系统在电子设备处于开机状态时通电。
在本公开一可行的实施方式中,如图3所示,检测模组120可以包括加速度传感器121,加速度传感器121用于检测电子设备的加速度。加速度传感器121连接控制模组140,加速度传感器121将电子设备的加速度数据传输至控制模组140。
加速度传感器121检测电子设备的加速度数据,当电子设备的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,控制模组140确定电子设备处于跌落状态。
其中,加速度传感器121可以检测电子设备在X、Y、Z三个方向的加速度。当电子设备处于跌落状态时,电子设备在竖直方向的加速度大于第一加速度阈值。该第一加速度阈值可以是7m/s
电子设备处于跌落状态是指电子设备在竖直方向上自由下落,此时电子设备在竖直方向受重力和空气阻力。在重力和空气阻力的作用下,电子设备加速下落,当电子设备触地的瞬间产生较大的反向加速度。
需要说明的是,在实际应用中由于电子设备在跌落时形态不定,因此当加速度传感器121检测到电子设备在X、Y、Z任一方向的加速度大于第一加速度阈值时,认为电子设备处于跌落状态。
检测模组120中的加速度传感器121在电子设备处于跌落状态时,加速度传感器121可以保持通电;或者在电子设备处于跌落状态时,加速度传感器121可以断电。
加速度传感器121在电子设备跌落时保持通电,在跌落过程中加速度传感器121实时检测电子设备的加速度。当电子设备的加速度小于第二加速度阈值且持续时间大于第二时间阈值时,电子设备停止跌落,控制模组140控制供电模组130向微机电系统供电。
其中,当加速度传感器121检测到的电子设备在X、Y、Z三个方向的加速度均小于第二加速度阈值,且持续时间大于第二时间阈值时,认为电子设备停止跌落。第二加速度阈值可以是3m/s
加速度传感器121在电子设备跌落时断电,此时,可以在延时第三时间阈值时,向加速度传感器121供电,供电后加速度传感器121检测电子设备当前的加速度。当电子设备的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,控制模组140确定电子设备仍然处于跌落状态。控制模组140控制供电模组130继续不向传感器110供电(加速度传感器121也断电)。当电子设备的加速度小于第二加速度阈值且持续时间大于第二时间阈值时,电子设备停止跌落,控制模组140控制供电模组130向其余传感器110中的微机电系统供电。
在本公开另一可行的实施方式中,如图4所示,检测模组120可以包括加速度传感器121和地磁传感器122,加速度传感器121和地磁传感器122分别连接控制模组140,地磁传感器122用于检测地磁场数据,控制模组140根据加速度数据和地磁场数据确定电子设备在竖直方向的加速度,当电子设备沿竖直方向的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,电子设备处于跌落状态。
通过地磁传感器122和加速度传感器121配合,能够确定电子设备在竖直方向的加速度,从而能够提高对电子设备跌落状态确定的准确性,避免误判电子设备的状态。
加速度传感器121检测电子设备的加速度数据,加速度传感器121可以检测电子设备在X、Y、Z三个方向的加速度。当电子设备处于跌落状态时,电子设备在竖直方向的加速度大于第一加速度阈值。通过加速度传感器121和地磁传感器122能够确定电子设备在竖直方向的加速度。第一加速度阈值可以是7m/s
电子设备处于跌落状态是指电子设备在竖直方向上自由下落,此时电子设备在竖直方向受重力和空气阻力。在重力和空气阻力的作用下,电子设备加速下落,当电子设备触地的瞬间产生较大的反向加速度。
检测模组120中的加速度传感器121在电子设备处于跌落状态时,加速度传感器121可以保持通电;或者在电子设备处于跌落状态时,加速度传感器121可以断电。
加速度传感器121在电子设备跌落时保持通电,在跌落过程中加速度传感器121实时检测电子设备沿竖直方向的加速度。当电子设备沿竖直方向的加速度小于第二加速度阈值且持续时间大于第二时间阈值时,电子设备停止跌落,控制模组140控制供电模组130向微机电系统供电。
其中,当加速度传感器121检测到的电子设备沿竖直方向的加速度均小于第二加速度阈值,且持续时间大于第二时间阈值时,认为电子设备停止跌落。第二加速度阈值可以是3m/s
加速度传感器121在电子设备跌落时断电,此时,可以在延时第三时间阈值时,向加速度传感器121供电,供电后加速度传感器121检测电子设备当前沿竖直方向的加速度。当电子设备沿竖直方向的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,控制模组140确定电子设备仍然处于跌落状态。控制模组140控制供电模组130继续不向传感器110供电(加速度传感器121也断电)。当电子设备的加速度小于第二加速度阈值且持续时间大于第二时间阈值时,电子设备停止跌落,控制模组140控制供电模组130向其余传感器110中的微机电系统供电。
进一步的,如图5所示,检测模组120还可以包括触摸检测模块123,触摸检测模块123和控制模组140连接,触摸检测模块123用于检测用户是否和电子设备接触,当用户和电子设备接触时认为电子设备不处于跌落状态。
通过触摸检测模块123检测用户实收和电子设备接触,用户和电子设备接触时确定电子设备不处于跌落状态。能够避免在一些特定的应用场景下(比如用户乘坐电梯或者用户乘坐交通工具时)误判电子设备处于跌落状态,影响电子设备的使用。
其中,触摸检测模块123可以包括电容触控件,电容触控件可以设于电子设备的边框20及后盖50。电容触控件和控制模组140连接,控制模组140能够采集电容触控件的电容值。
示例的,可以在电子设备的边框20的两侧设置电容触控件。当电子设备的边框20为金属边框20时,可以在金属边框20上设置金属段作为电容触控件的电容板。当用户触摸到边框20上的金属段时,电容触控件的电容值发生变化,控制模组140检测到电容值的变化,则认为用户握持电子设备。
或者触摸检测模块123也可以包括触控屏,也即是触控屏可以作为检测模块的部分,当电子设备的加速度大于第一加速度阈值,触控屏感应到用户触控时,则控制模组140确定用户握持电子设备。
或者触摸检测模块123也可以包括压力传感器110,压力传感器110可以设于电子设备的边框20或者后盖50。当用户按压到边框20上的压力传感器110时,压力传感器110被触发,控制模组140检测到压力传感器110的变化,则认为用户握持电子设备。
需要说明的是,在本公开实施例中触摸检测模块123的检测功能可以在加速度传感器121检测到电子设备的加速度大于第一加速度阈值时工作,当检测模块检测到用户握持电子设备时,则即使加速度大于第一加速度阈值时,控制模组140也认为电子设备不处于跌落状态。在本公开实施例中,检测模组120包括加速度传感器时,该加速度传感器可以作为检测模组,也可以是是待控制的传感器。
供电模组130分别连接传感器110和检测模组120,供电模组130用于向传感器110和检测模组120供电。如图6所示,供电模组130可以包括:电源131和开关电路132,开关电路132分别连接电源131、传感器110及控制模组140,控制模组140在电子设备处于跌落状态时控制开关电路132关断。
其中,电源131可以是电子设备的电池40或者电子设备的电源管理电路。开关电路132的输入端连接电源131,开关电路132的输出端可以连接传感器110及检测模组120,开关电路132的控制端连接控制模组140。开关电路132在电子设备开机后处于常开状态,当检测模组120检测到电子设备处于跌落状态时,控制模组140控制开关电路132关断。检测模组120检测到电子设备结束跌落时,控制模组140控制开关电路132导通。
在本公开一可行的实施方式中,如图7所示,开关电路132可以包括第一开关101,电子设备包括N个传感器110。第一开关101的第一端连接电源131,第一开关101的第二端连接N个传感器110,第一开关101的控制端连接控制模组140,当电子设备处于跌落状态时,控制模组140控制第一开关101关断,N为大于等于2的正整数。
示例的,第一开关101可以是第一MOS管,第一MOS管的第一端连接电源131,第一MOS管的第二端连接多个传感器110,第一MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第一MOS管常开,并在电子设备处于跌落状态时控制第一MOS管关断。当然在实际应用中,第一开关101也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
在本公开另一可行的实施方式中,如图8所示,开关电路132可以包括N个第二开关102,电子设备包括N个传感器110,N个第二开关102关的第一端连接电源131,每个第二开关102的第二端对应连接一传感器110,N个第二开关102的控制端连接控制模组140,当电子设备处于跌落状态时,控制模组140控制N个第二开关102关断,N为大于等于2的正整数。
示例的,第二开关102可以是第二MOS管,第二MOS管的第一端连接电源131,第二MOS管的第二端连接传感器110,第二MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第二MOS管常开,并在电子设备处于跌落状态时控制第二MOS管关断。当然在实际应用中,第二开关102也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
控制模组140控制供电模组130在电子设备处于跌落状态时停止向加速度传感器121供电,并且控制模组140在延时第三时间阈值时向加速度传感器121供电。加速度传感器121重新供电通过加速度传感器121检测跌落是否结束,若跌落结束供电模组130重新向各传感器110供电。
进一步的,如图9所示,开关电路132还可以包括第三开关103,第三开关103的第一端连接电源131,第三开关103的第二端连接加速度传感器121,第三开关103的控制端连接控制模组140,控制模组140在电子设备开机时控制第三开关103常开,并在电子设备处于跌落状态时控制第三开关103关断。
示例的,第三开关103可以是第三MOS管,第三MOS管的第一端连接电源131,第三MOS管的第二端连接加速度传感器121,第三MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第三MOS管常开,并在电子设备处于跌落状态时控制第三MOS管关断。当然在实际应用中,第三开关103也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
需要说明的是,本公开实施例中每个MOS管均具有一控制端、第一端和第二端。具体的,各个MOS管的控制端可以为栅极、第一端可以为源极、第二端可以为漏极;或者,各个MOS管的控制端可以为栅极、第一端可以为漏极、第二端可以为源极。此外,各个MOS管还可以为增强型晶体管或者耗尽型晶体管,本示例实施方式对此不作具体限定。
本公开实施例提供的电子设备,通过检测模组120检测电子设备是否处于跌落状态,当电子设备处于跌落状态时,控制模组140控制供电模组130停止向传感器110供电,从而关断微机电系统,避免了微机电系统在工作时受到跌落冲击,降低了传感器110由于跌落而损坏的风险,提高了电子设备内传感器110的稳定性。
本公开示例性实施例还提供一种电子设备的跌落保护方法,电子设备包括传感器110,传感器110具有微机电系统,如图10所示,该电子设备的跌落保护方法可以包括如下步骤:
步骤S110,利用检测模组确定电子设备是否处于跌落状态,检测模组设于电子设备;
步骤S120,当电子设备处于跌落状态时,控制供电模组停止向传感器供电,供电模组设于电子设备。
本公开实施例提供的电子设备的跌落保护方法,通过检测模组120检测电子设备是否处于跌落状态,当电子设备处于跌落状态时,控制模组140控制供电模组130停止向传感器110供电,从而关断微机电系统,避免了微机电系统在工作时受到跌落冲击,降低了传感器110由于跌落而损坏的风险,提高了电子设备内传感器110的稳定性。
检测模组120包括加速度传感器121,如图11所示,本公开实施例提供的电子设备的跌落保护方法还包括:
步骤S130,确定加速度传感器是否断电;
步骤S140,当加速度传感器断电,在延时第三时间阈值时控制供电模组向加速度传感器供电。
下面将对本公开实施例提供的电子设备的跌落保护方法的各步骤进行详细说明:
在步骤S110中,可以利用检测模组120确定电子设备是否处于跌落状态,检测模组120设于电子设备。
其中,检测模组120可以包括加速度传感器121,加速度传感器121用于检测电子设备的加速度。在此基础上,步骤S110可以通过如下方式实现:
当电子设备的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,确定电子设备处于跌落状态。
其中,加速度传感器121可以检测电子设备在X、Y、Z三个方向的加速度。当电子设备处于跌落状态时,电子设备在竖直方向的加速度大于第一加速度阈值。该第一加速度阈值可以是7m/s
或者,检测模组120可以包括加速度传感器121和地磁传感器122,加速度传感器121和地磁传感器122分别连接控制模组140,地磁传感器122用于检测地磁场数据,控制模组140根据加速度数据和地磁场数据确定电子设备在竖直方向的加速度,当电子设备沿竖直方向的加速度大于第一加速度阈值时,且持续时间大于第一时间阈值时,确定电子设备处于跌落状态。
检测模组120还可以包括触摸检测模块123,检测模块和控制模组140连接,触摸检测模块123用于检测用户是否和电子设备接触。此时,当用户和电子设备接触时,确定电子设备不处于跌落状态。
通过触摸检测模块123检测用户实收和电子设备接触,用户和电子设备接触时确定电子设备不处于跌落状态。能够避免在一些特定的应用场景下(比如用户乘坐电梯或者用户乘坐交通工具时)误判电子设备处于跌落状态,影响电子设备的使用。
其中,检测模块可以包括电容触控件,电容触控件可以设于电子设备的边框20及后盖50。电容触控件和控制模组140连接,控制模组140能够采集电容触控件的电容值。
示例的,可以在电子设备的边框20的两侧设置电容触控件。当电子设备的边框20为金属边框20时,可以在金属边框20上设置金属段作为电容触控件的电容板。当用户触摸到边框20上的金属段时,电容触控件的电容值发生变化,控制模组140检测到电容值的变化,则认为用户握持电子设备。
或者检测模块也可以包括触控屏,也即是触控屏可以作为检测模块的部分,当电子设备的加速度大于第一加速度阈值,触控屏感应到用户触控时,则控制模组140确定用户握持电子设备。
或者检测模块也可以包括压力传感器110,压力传感器110可以设于电子设备的边框20或者后盖50。当用户按压到边框20上的压力传感器110时,压力传感器110被触发,控制模组140检测到压力传感器110的变化,则认为用户握持电子设备。
需要说明的是,在本公开实施例中检测模组120的检测功能可以在加速度传感器121检测到电子设备的加速度大于第一加速度阈值时工作,当检测模块检测到用户握持电子设备时,则即使加速度大于第一加速度阈值时,控制模组140也认为电子设备不处于跌落状态。
在步骤S120中,当电子设备处于跌落状态时,控制供电模组130停止向传感器110供电,供电模组130设于电子设备。
其中,供电模组130可以包括:电源131和开关电路132,开关电路132分别连接电源131、传感器110及控制模组140,控制模组140在电子设备处于跌落状态时控制开关电路132关断。
其中,电源131可以是电子设备的电池40或者电子设备的电源管理电路。开关电路132的输入端连接电源131,开关电路132的输出端可以连接传感器110及检测模组120,开关电路132的控制端连接控制模组140。开关电路132在电子设备开机后处于常开状态,当检测模组120检测到电子设备处于跌落状态时,控制模组140控制开关电路132关断。检测模组120检测到电子设备结束跌落时,控制模组140控制开关电路132导通。
在本公开一可行的实施方式中,开关电路132可以包括第一开关101,电子设备包括N个传感器110。第一开关101的第一端连接电源131,第一开关101的第二端连接N个传感器110,第一开关101的控制端连接控制模组140,当电子设备处于跌落状态时,控制模组140控制第一开关101关断,N为大于等于2的正整数。
示例的,第一开关101可以是第一MOS管,第一MOS管的第一端连接电源131,第一MOS管的第二端连接多个传感器110,第一MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第一MOS管常开,并在电子设备处于跌落状态时控制第一MOS管关断。当然在实际应用中,第一开关101也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
在本公开另一可行的实施方式中,开关电路132可以包括N个第二开关102,电子设备包括N个传感器110,N个第二开关102关的第一端连接电源131,每个第二开关102的第二端对应连接一传感器110,N个第二开关102的控制端连接控制模组140,当电子设备处于跌落状态时,控制模组140控制N个第二开关102关断,N为大于等于2的正整数。
示例的,第二开关102可以是第二MOS管,第二MOS管的第一端连接电源131,第二MOS管的第二端连接传感器110,第二MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第二MOS管常开,并在电子设备处于跌落状态时控制第二MOS管关断。当然在实际应用中,第二开关102也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
进一步的,开关电路132还可以包括第三开关103,第三开关103的第一端连接电源131,第三开关103的第二端连接加速度传感器121,第三开关103的控制端连接控制模组140,控制模组140在电子设备开机时控制第三开关103常开,并在电子设备处于跌落状态时控制第三开关103关断。
示例的,第三开关103可以是第三MOS管,第三MOS管的第一端连接电源131,第三MOS管的第二端连接加速度传感器121,第三MOS管的控制端连接控制模组140。控制模组140在电子设备开机时控制第三MOS管常开,并在电子设备处于跌落状态时控制第三MOS管关断。当然在实际应用中,第三开关103也可以是电磁继电器、电磁开关等开关,本公开实施例并不以此为限。
当电子设备的加速度小于第二加速度阈值且持续时间大于第二时间阈值时,确定电子设备停止跌落,控制供电模组130向微机电系统供电。
其中,当加速度传感器121检测到的电子设备在X、Y、Z三个方向的加速度均小于第二加速度阈值,且持续时间大于第二时间阈值时,认为电子设备停止跌落。第二加速度阈值可以是3m/s
在步骤S130中,可以确定加速度传感器121是否断电。
加速度传感器121作为传感器110的一种,在电子设备处于跌落状态时,加速度传感器121也可以关断。当供电模组130在电子设备处于跌落状态时关断,则确定加速度传感器121断电。可以通过电流传感器110或者电压传感器110检测加速度传感器121是否断电。或者也可以通过检测控制模组140输出的控制信号确定加速度传感器121是否断电。
在步骤S140中,当加速度传感器121断电,在延时第三时间阈值时控制供电模组130向加速度传感器121供电。
其中,控制模组140控制供电模组130在电子设备处于跌落状态时停止向加速度传感器121供电,并且控制模组140在延时第三时间阈值时向加速度传感器121供电。加速度传感器121重新供电通过加速度传感器121检测跌落是否结束,若跌落结束供电模组130重新向各传感器110供电。
本公开实施例提供的电子设备的跌落保护方法,通过检测模组120检测电子设备是否处于跌落状态,当电子设备处于跌落状态时,控制模组140控制供电模组130停止向传感器110供电,从而关断微机电系统,避免了微机电系统在工作时受到跌落冲击,降低了传感器110由于跌落而损坏的风险,提高了电子设备内传感器110的稳定性。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。