一种超级电容器注液装置
文献发布时间:2024-01-17 01:12:29
技术领域
本发明涉及实验设备技术领域,具体涉及一种超级电容器注液装置。
背景技术
高校实验室在对超级电容器的研究过程中,通常都会自己制作超级电容。具体地,首先将纳米结构活性炭颗粒均匀粘附在铝箔片上,并利用隔膜缠绕;然后再将其放入电池盒中,并盖上密封盖;最后向电池盒内注入电解液,即完成超级电容器的制作。为了研究不同电解质(例如:碳酸丙烯酯(PC)、碳酸乙烯酯(EC)、乙腈(ACN)、四氢呋喃(THF)等)对超级电容器的储能功效的影响,通常需要向不同的电池盒内注入不同的电解液。
目前,在实验室通常都是利用注射器将电解液注入电池盒内。上述方式存在的不足之处在于:效率较低,不便于制作小批量的超级电容。然而在进行测试的过程中,为了数据的客观性,通常需要针对不同电解液设置若干超级电容。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种超级电容器注液装置,以提高电解液的注液效率,从而达到便于在实验室制作小批量超级电容的目的。
为了实现上述目的,本发明提供一种超级电容器注液装置,包括:
机体;以及
设置在所述机体上的注液单元,所述注液单元包括:
储存箱,其设置在所述机体上;
注液针,其固定设置在所述机体上;
输液管,其进液端与所述储存箱的出液口连通、出液端与所述注液针的进液口连通;
输送泵,其设置在所述机体上,其用于将所述存储箱内的电解液通过所述输液管和所述注液针输送至超级电容器内。
进一步地,所述注液单元还包括定位组件,所述定位组件包括:
定位座,所述定位座的顶部设置有定位孔,所述定位座设置在所述注液针的下方并与所述机体滑动连接,其可沿Z轴方向在第一工作位置A和第二工作位置A之间作往复直线运动;
驱动机构,其设置在所述机体上,其用于驱动所述定位座在所述第一工作位置A和所述第二工作位置A之间作往复直线运动;以及
夹紧机构,其设置在所述定位座上,其用于夹紧放置在所述定位孔内的所述超级电容器内。
进一步地,所述夹紧机构包括两个对称设置的夹紧结构,所述夹紧结构包括:
夹紧滑块,其滑动设置在所述定位孔的侧壁内,其可沿靠近或远离所述定位孔的轴心线的方向在第一工作位置B和第二工作位置B之间作往复直线运动;以及
第一弹性件,其设置在所述夹紧滑块的靠近或远离所述定位孔的轴心线的一侧,其两端分别与所述夹紧滑块和所述定位座抵接,且自然状态下,其具有使所述夹紧滑块向靠近所述定位孔的轴心线的一侧运动的趋势。
进一步地,所述驱动机构包括:
凸轮轴,其与所述机体转动连接;
电机,其与所述机体固定连接,其动力输出轴与所述凸轮轴传动连接;
推拉杆,其第一端与所述凸轮轴的外周面抵触、第二端与所述定位座传动连接;以及
第二弹性件,其套设在所述推拉杆上,且自然状态下,其具有使所述推拉杆向靠近所述凸轮轴的旋转中心线的方向运动的趋势。
进一步地,所述驱动机构还包括:
第一滑块,其与所述机体滑动连接,其套设在所述推拉杆上并与所述推拉杆滑动连接,其可沿X轴方向在第一工作位置C和第二工作位置C之间作往复直线运动;
第二滑块,其套设在所述推拉杆的第二端并与所述推拉杆转动连接;以及
设置在所述凸轮轴的外周面的引导槽,其用于对所述第二滑块的滑动进行引导,其包括第一引导部、第二引导部、第三引导部和第四引导部,所述第一引导部、所述第二引导部、所述第三引导部和所述第四引导部依次首尾连接以形成“8”字形,且所述第一引导部和所述第三引导部均从所述凸轮轴的距离其自身旋转中心线最远处向凸轮轴的两侧延伸,所述第二滑块沿所述第一引导部和所述第二引导部向所述第三引导部滑动并可暂时定位在所述第三引导部的距离所述凸轮轴的旋转中心线最远处,所述第二滑块离开所述第三引导部沿所述第四引导部向所述第一引导部滑动并可暂时定位在所述第一引导部距离所述凸轮轴的旋转中心线最远处。
进一步地,所述推拉杆的第二端固定设置有第三滑块,所述第三滑块滑动设置在所述定位座内并位于两个所述夹紧滑块之间,所述推拉杆与所述定位座滑动连接,所述夹紧滑块的面向所述定位孔的轴心线的一侧设置有第一导向斜面,且所述第一导向斜面的面向所述注液针的一端距离所述定位孔的轴心线较近,所述第一导向斜面的面向所述注液针的一端设置第一限位面,所述第一导向斜面的远离所述注液针的一端设置有第二限位面。
进一步地,所述第三滑块的两侧设置有与所述第一导向斜面相适应的第二导向斜面。
进一步地,所述注液单元的数量为多个,多个所述注液单元沿Y轴方向依次间隔设置。
本发明的有益效果:
本发明所提供的超级电容器注液装置,结构简单,设计合理,可以自动对超级电容器进行注液,从而提高了实验室对于超级电容器样品的制备效率,进而达到了便于小批量制备超级电容器样品的目的。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
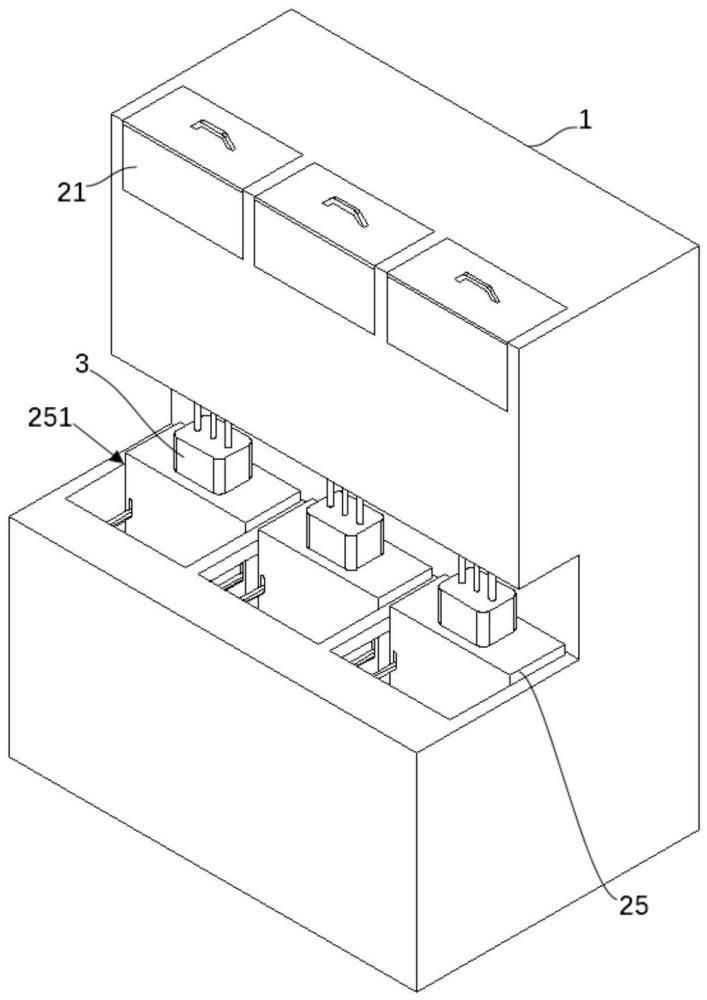
图1为本发明一实施例提供的超级电容器注液装置的立体结构视图;
图2为图1所示的超级电容器注液装置的剖视图;
图3为图2所示的A处的放大视图;
图4为图2所示的B处的放大视图;
图5为图1所示的超级电容器注液装置的注液单元的立体结构视图;
图6为图5所示的C处的放大视图;
图7为图5所示的注液单元右视图;
图8为图7所示的D处的放大视图。
附图标记:
机体1、注液单元2、储存箱21、注液针22、输液管23、输送泵24、定位组件25、定位座251、定位孔2511、驱动机构252、凸轮轴2521、电机2522、推拉杆2523、第二弹性件2524、第一滑块2525、第二滑块2526、引导槽2527、第一引导部25271、第二引导部25272、第三引导部25273、第四引导部25274、第三滑块2528、第二导向斜面25281、夹紧机构253、夹紧滑块2531、第一导向斜面25311、第一限位面25312、第二限位面25313、第一弹性件2532、超级电容器3。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。在本发明的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
在本申请中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
如图1-8所示,本发明提供一种超级电容器注液装置,包括机体1和注液单元2。
其中,注液单元2设置在机体1上,优选地,注液单元2的数量为多个,上述多个注液单元2沿Y轴方向依次间隔设置。通过设置多个注液单元2,既可以达到同时对多个超级电容器3进行电解液注入的目的,还可以达到对不同的超级电容器3注入不同电解液的目的,从而达到提高效率的目的。
注液单元2包括储存箱21、注液针22、输液管23和输送泵24。
其中,储存箱21设置在机体1上。注液针22固定设置在机体1上。输液管23的进液端与储存箱21的出液口连通、出液端与注液针22的进液口连通。输送泵24设置在机体1上,输送泵24用于将存储箱内的电解液通过输液管23和注液针22输送至超级电容器3内。优选地,输送泵24为蠕动泵。
使用时,将注液针22插入待注液超级电容器3内,在蠕动泵的作用下,将储存箱21内的电解液通过输液管23和注液针22输送到超级电容器3内,从而达到注液的目的。
此结构的超级电容器3注液装置,可以自动将电解液注入超级电容器3内,从而达到了提高超级电容器3实验样品制作效率的目的。
在一个实施例中,注液单元2还包括定位组件25,定位组件25包括定位座251、驱动机构252和夹紧机构253。
定位座251的顶部开设有定位孔2511,定位座251设置在注液针22的下方并与机体1滑动连接,定位座251可沿Z轴方向在第一工作位置A和第二工作位置A之间作往复直线运动,具体地,当定位座251处于第一工作位置A时,注液针22与超级电容器3分离,当定位座251处于第二工作位置A时,注液针22可插入超级电容器3内。
驱动机构252设置在机体1上,驱动机构252的动力输出端与定位座251连接,驱动机构252用于驱动定位座251在第一工作位置A和第二工作位置A之间作往复直线运动。夹紧机构253设置在定位座251上,夹紧机构253用于夹紧放置在定位孔2511内的超级电容器3内,使用时,在夹紧机构253的作用下,夹紧机构253将超级电容器3夹紧,从而使得定位座251从第二工作位置A向第一工作位置A运动时,定位座251可以带着超级电容器3一起移动,从而使得注液针22与超级电容器3分离。
使用时,将超级电容器3插入定位孔2511内,驱动结构驱动定位座251从第一工作位置A向第二工作位置A移动,从而达到将注液针22插入超级电容器3内的目的。当注液完成后,驱动机构252驱动定位座251从第二工作位置A向第一工作位置A运动,在夹紧机构253的作用下,夹紧机构253将超级电容器3夹紧,从而使得定位座251可以带着超级电容器3一起移动,从而使得注液针22与超级电容器3分离。
此结构的注液单元2结构简单,设计合理,且便于注液针22插入超级电容器3内和从超级电容器3内拔出。
在一个实施例中,夹紧机构253包括两个对称设置的夹紧结构,夹紧结构包括夹紧滑块2531和第一弹性件2532。
夹紧滑块2531滑动设置在定位孔2511的侧壁内,夹紧滑块2531可沿靠近或远离定位孔2511的轴心线的方向在第一工作位置B和第二工作位置B之间作往复直线运动。具体地,当夹紧滑块2531处于第一工作位置B时,夹紧滑块2531距离定位孔2511的轴心线的距离较近,当夹紧滑块2531处于第二工作位置B时,夹紧滑块2531距离定位孔2511的轴心线的距离较远。
第一弹性件2532设置在夹紧滑块2531的靠近或远离定位孔2511的轴心线的一侧,第一弹性件2532的两端分别与夹紧滑块2531和定位座251抵接,且自然状态下,第一弹性件2532具有使夹紧滑块2531向靠近定位孔2511的轴心线的一侧运动的趋势。优选地,第一弹性件2532为弹簧。
此结构的夹紧机构253,结构简单,设计合理。
在一个实施例中,驱动机构252包括凸轮轴2521、电机2522、推拉杆2523和第二弹性件2524。
凸轮轴2521与机体1转动连接。电机2522与机体1固定连接,电机2522的动力输出轴与凸轮轴2521传动连接。例如:电机2522的动力输出轴与凸轮轴2521的动力输入端固定连接、电机2522的动力输出轴与凸轮轴2521的动力输入端通过齿轮结构或传动带结构传动连接。
推拉杆2523的第一端与凸轮轴2521的外周面抵触、第二端与定位座251传动连接。
第二弹性件2524套设在推拉杆2523上,且自然状态下,第二弹性件2524具有使推拉杆2523向靠近凸轮轴2521的旋转中心线的方向运动的趋势。优选地,第二弹性件2524为弹簧。
使用时,电机2522驱动凸轮轴2521转动,在凸轮轴2521的作用下,凸轮轴2521驱动推拉杆2523作上下往复直线运动,从而达到通过推拉杆2523驱动定位座251在第一工作位置A和第二工作位置A之间作往复直线运动的目的。
此结构的驱动结构,结构简单,设计合理,操作方便。
在一个实施例中,驱动机构252还包括第一滑块2525、第二滑块2526和引导槽2527。
第一滑块2525与机体1滑动连接,第一滑块2525套设在推拉杆2523上并与推拉杆2523滑动连接,第一滑块2525可沿X轴方向在第一工作位置C和第二工作位置C之间作往复直线运动,具体地,当第二滑块2526处于第二工作位置C时,第二滑块2526处于注液针22的正下方,当第二滑块2526处于第一工作位置C时,第二滑块2526远离注液针22。第二滑块2526套设在推拉杆2523的第二端并与推拉杆2523转动连接。
引导槽2527开设在凸轮轴2521的外周面,引导槽2527用于对第二滑块2526的滑动进行引导,引导槽2527包括第一引导部25271、第二引导部25272、第三引导部25273和第四引导部25274,第一引导部25271、第二引导部25272、第三引导部25273和第四引导部25274依次首尾连接以形成“8”字形。且第一引导部25271和第三引导部25273从凸轮轴2521的距离其自身旋转中心线最远处向凸轮轴2521的两侧延伸。
其中,第二滑块2526沿第一引导部25271和第二引导部25272向第三引导部25273滑动并可暂时定位在第三引导部25273的距离凸轮轴2521的旋转中心线最远处,此过程为第一滑块2525从第一工作位置C向第二工作位置C运动的过程,当第二滑块2526在第三引导部25273内滑动时,第一滑块2525则运动至第二工作位置C,同时,第一滑块2525通过推拉杆2523带着定位座251运动至第二工作位置C,从而使得定位座251处于注液针22的正下方,当第二滑块2526沿着第三引导部25273移动至第三引导部25273的距离凸轮轴2521的旋转中心线最远处时,在凸轮轴2521的作用下,凸轮轴2521通过推拉杆2523驱动定位座251从第一工作位置A运动至第二工作位置A,从而使得注液针22插入超级电容器3内。
第二滑块2526离开第三引导部25273沿第四引导部25274向第一引导部25271滑动。此过程为第一滑块2525从第二工作位置C向第一工作位置C移动的过程,当第二滑块2526在第一引导部25271内滑动时,第一滑块2525则运动至第一工作位置C,同时,第一滑块2525通过推拉杆2523带着定位座251运动至第一工作位置C,从而使得定位座251远离注液针22,进而达到便于取下超级电容器3的目的。
在一个实施例中,推拉杆2523的第二端固定设置有第三滑块2528,第三滑块2528滑动设置在定位座251内并位于两个夹紧滑块2531之间,推拉杆2523与定位座251滑动连接,夹紧滑块2531的面向定位孔2511的轴心线的一侧设置有与第三滑块2528相配合的第一导向斜面25311,且第一导向斜面25311的面向注液针22的一端距离定位孔2511的轴心线较近,使用时,在推拉杆2523驱动第三滑块2528向上移动的过程中,第三滑块2528通过第一导向斜面25311驱动两个夹紧滑块2531相互远离,从而达到解除对于超级电容器3的夹紧的目的。第一导向斜面25311的面向注液针22的一端设置第一限位面25312,使用时,当第三滑块2528与第一限位面25312抵触时,第三滑块2528通过第一限位面25312推动夹紧滑块2531和定位座251向上移动。第一导向斜面25311的远离注液针22的一端设置有第二限位面25313,使用时,当第三滑块2528与第二限位面25313抵触时,第三滑块2528通过第二限位面25312推动夹紧滑块2531和定位座251向下移动。
使用时,在第二滑块2526从第一引导部25271的距离凸轮轴2521的旋转中心线最近处向其自身的距离凸轮轴2521的旋转中心线最远处运动的过程中,凸轮轴2521通过推拉杆2523驱动第三滑块2528移动,在第一导向斜面25311的作用下,第三滑块2528驱动两个夹紧滑块2531克服第一弹性件2532的弹力向远离定位孔2511的轴心线的方向移动,从而达到解除对于超级电容器3的夹紧的目的,进而达到便于向定位孔2511内放入待注液的超级电容器3和拿取已注液的超级电容器3的目的,同时,还可以避免在拿取已注液的超级电容器3时,夹紧滑块2531划伤超级电容器3。
同样地,第二滑块2526从第三引导部25273的距离凸轮轴2521的旋转中心线最远处向其自身的距离凸轮轴2521的旋转中心线的过程中,两个夹紧滑块2531在第一弹性件2532的作用下,相互靠近,从而达到夹紧超级电容器3的目的,当第三滑块2528与第二限位面25313相抵触时,第三滑块2528则可以带着定位座251从第二工作位置A向第一工作位置A移动,从而达到使得超级电容器3与注液针22相分离的目的。
此结构的超级电容器3注液装置,不仅结构简单,设计合理,而且还可以在定位座251随着第一滑块2525运动至第一工作位置C时,自动解除锁定机构对于超级电容器3的锁定,从而达到便于向定位孔2511内放入待注液的超级电容器3和拿取已注液的超级电容器3的目的,同时,还可以避免在拿取已注液的超级电容器3时,夹紧滑块2531划伤超级电容器3。
优选地,第三滑块2528的两侧设置有与第一导向斜面25311相适应的第二导向斜面25281。
本发明的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。