用于检测安全带的使用状态的方法、安全带组件及车辆
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及检测安全带、尤其是车辆座椅上的安全带的使用状态,尤其涉及一种用于检测安全带的使用状态的方法、一种安全带组件以及一种车辆。
背景技术
在高速行驶的车辆发生碰撞或紧急制动时,车辆突然减速,车内的人员可能在惯性的作用下与车内的方向盘、挡风玻璃、座椅靠背等物体发生二次碰撞,导致严重的人员伤害。在这种情况下,安全带可用于将车内的人员固定在座椅上,从而避免人员受伤或减轻受伤程度。车辆事故调查表明,当车辆发生正面碰撞时,如果系了安全带,可使事故死亡率减少57%,侧面撞车时可使事故死亡率减少44%,翻车时可使事故死亡率减少80%,可见安全带的作用巨大。
然而,很多人在乘车时都不喜欢系上安全带,甚至采用各种方式防止安全带未系的警告响起,例如将安全带从背后直接插在安全带锁扣里来避免触发报警。因此,如何采用有效手段,检测出安全带的使用状态是一个重要的研究方向。在共享汽车、出租车、网约车等使用场景下,有效检测安全带使用状态的方法和设备,也是尤为必要。
目前,已知基于机器视觉的安全带检测方法。然而,现有的检测方法以安全带的形状及颜色为特征点进行检测。当车内人员的衣服表面图案形状及颜色与安全带十分接近的时候,这种检测方法的误判率极高。
现有技术在安全带的使用状态的检测方面仍然存在不足。
发明内容
本发明的目的在于提供一种改进的用于检测安全带的使用状态的方法及相应的安全带组件和车辆,以提高检测的准确性。
根据本发明的第一方面,提供了一种用于检测安全带的使用状态的方法,其中,所述安全带的外侧面至少部分地具有反光区域,所述方法包括:利用图像传感器获取安全带的图像;利用处理器对图像中的像素的亮度从高到低进行排序,并选取第N个亮度作为分割阈值以从图像中分割出高亮区域,其中,N为预先标定的反光区域的反光像素数;以及处理器根据分割出的高亮区域判断安全带是否处于工作状态。
通过在安全带的外侧面设置反光区域,可提高安全带的亮度,使安全带在图像中呈现高亮状态。处理器可根据预先标定的反光区域的反光像素数N从图像中提取亮度最高的N个像素,这些像素基本上对应于反光区域,从而能够准确且高效地从图像中识别出安全带,并进而判断安全带是否处于工作状态。由此,能够减少乘车人员的衣服表面的图案和颜色的干扰。另外,在不同的光照环境下,获取的图像的整体亮度可能不同。在这种情况下,如果根据预先设定的固定的分割阈值来分割高亮区域,则可能导致分割出的高亮区域与实际的反光区域不匹配。选取第N个像素的亮度为分割阈值尤其能够排除环境亮度变化的干扰。
在一个示例性实施例中,反光区域整体上为直线形;和/或反光区域在安全带的整个长度上延伸。
在一个示例性实施例中,在从图像中分割出高亮区域时:对图像中的亮度高于分割阈值的像素点赋值1,对图像中的其它像素点赋值0;和/或确定图像中的亮度高于分割阈值的所有像素点的坐标的集合G。
在一个示例性实施例中,在根据高亮区域判断安全带是否处于工作状态时,将集合G内的每一个点分别通过霍夫变换转变为霍夫空间中的一条映射线,确定映射线的交点中相交的映射线最多的交点的交点坐标,通过所述交点坐标确定代表反光区域的目标直线的表达式:y=cx+d。
在一个示例性实施例中,根据目标直线的表达式,处理器从集合G中确定图像中的反光区域的起点坐标和终点坐标,并且确定图像中的反光区域的长度。
在一个示例性实施例中,当长度大于长度设定值时,则判定安全带处于工作状态,所述长度设定值尤其设定为安全带最大长度的一半。
在一个示例性实施例中,所述图像覆盖理论上的头部区域,所述方法还包括利用处理器检测图像中是否包含人脸图像以判断是否有人员乘坐。
在一个示例性实施例中,所述方法包括:如果在有人员乘坐的情况下判定安全带未处于工作状态,则警示装置发出警示信息,所述警示信息尤其包括声音信息、图标信息或灯光信息。
根据本发明的第二方面,提供了一种安全带组件,其中,所述安全带组件包括安全带、图像传感器和处理器,所述安全带的外侧面至少部分地具有反光区域,所述安全带组件配置成能够执行根据本发明的用于检测安全带的使用状态的方法。
根据本发明的第三方面,提供了一种车辆,所述车辆包括根据本发明的安全带组件。
附图说明
下面,通过参看附图更详细地描述本发明,可以更好地理解本发明的原理、特点和优点。附图包括:
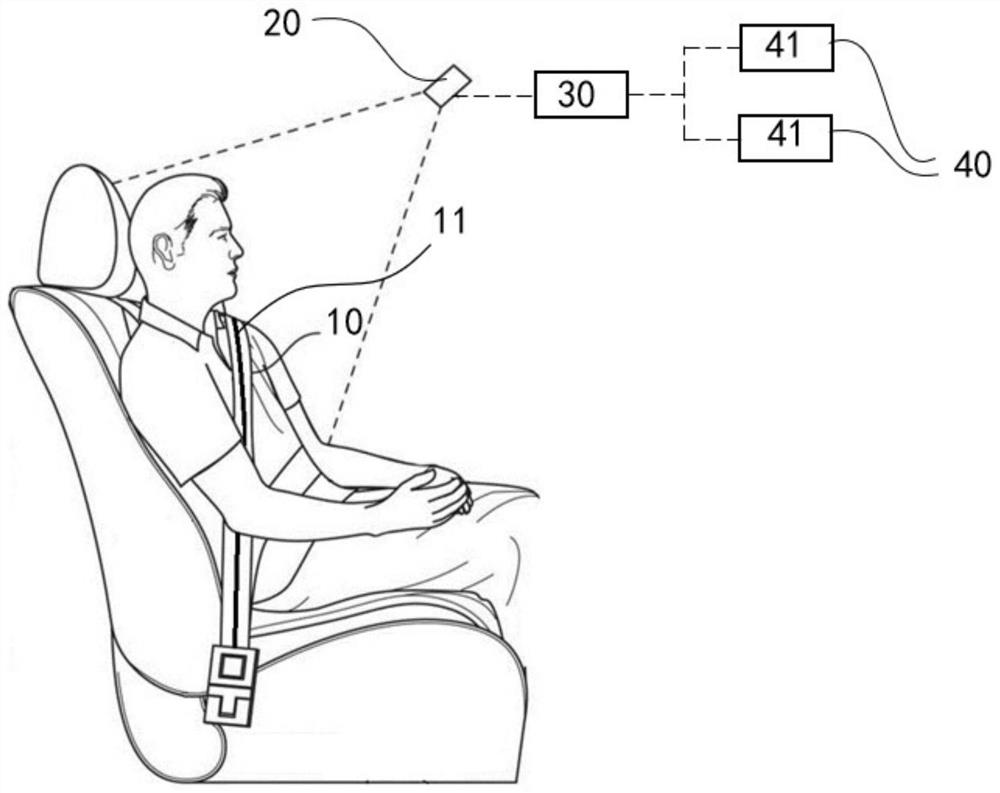
图1示意性地示出了根据本发明的一个示例性实施例的安全带组件;
图2示意性地示出了图1的实施例中获取的图像;
图3示意性地示出了根据本发明的一个示例性实施例中采用的霍夫变化;
图4示意性地示出了图1的实施例中的安全带;以及
图5示意性地示出了根据本发明的一个示例性实施例的用于检测安全带的使用状态的方法。
具体实施方式
为了使本发明所要解决的技术问题、技术方案以及有益的技术效果更加清楚明白,以下将结合附图以及多个示例性实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,而不是用于限定本发明的保护范围。
图1示意性地示出了根据本发明的一个示例性实施例的安全带组件。所述安全带组件尤其适于安装在车辆中。安全带组件包括安全带10、图像传感器20和处理器30。所述安全带10的外侧面至少部分地具有反光区域11。安全带10可固定至车辆的座椅或车身。图像传感器20配置成能够获取安全带10的图像。处理器30配置成能够对图像中的像素的亮度从高到低进行排序,并选取第N个亮度作为分割阈值以从图像中分割出高亮区域50(见图2),其中,N为预先标定的反光区域11的反光像素数。处理器30能够根据分割出的高亮区域50判断安全带10是否处于工作状态。
由于安全带10的外侧面设有反光区域11,因此,安全带10在图像中将呈现高亮状态。处理器30仅需从图像中提取出代表反光区域11的高亮区域50即可确定安全带10的状态。由此,利用安全带10的反光特性,提高安全带10的亮度,并根据亮度阈值从图像中提取出与反光区域11对应的高亮区域50,从而能够准确且高效地从图像中识别出安全带10,进而判断安全带10是否处于工作状态。这尤其有利于提高车辆操作的安全性。相对于以安全带的形状及颜色为特征点进行检测的检测方法,能够减少、甚至排除乘车人员的衣服表面的图案和颜色的干扰。
在不同的光照环境下,图像的整体亮度可能不同。在这种情况下,如果根据预先设定的固定的分割阈值来分割高亮区域50,则可能导致分割出的高亮区域50与实际的反光区域11不匹配。选取第N个像素的亮度为分割阈值尤其能够排除环境亮度的干扰。
反光像素数N表示安全带10在正常工作状态下应在图像中占据的像素数量。反光像素数N例如可通过多次试验的方式进行预先标定。
图像传感器20例如可以是CCD摄像机。可采用多个图像传感器20,并使每个图像传感器20分别设置成用于获取单个相应的安全带10的图像。也可使单个图像传感器20设置成用于获取两个以上安全带10的图像。尤其可使用单个图像传感器20获取车辆上的所有安全带10的图像。这具有轻量化及成本降低的优势。
图2示意性地示出了图1的实施例中获取的图像,其中,为了清楚起见,乘客和车辆内部的其它部件未在图中示出。图2示出了当安全带10处于工作状态时,图像中将显示基本上未被遮挡的伸长的安全带10。
在该实施例中,安全带10的反光区域11整体上为直线形。直线形的形状便于从图像中识别出安全带10。应理解,反光区域11也可实施为其它形状,例如规则排列的圆形或三角形等。
如上文所示,处理器30可对图像中的像素的亮度进行排序,例如可利用直方图对亮度进行排序,并且选取第N个像素的亮度作为分割阈值。处理器30可对图像中的亮度高于分割阈值的像素点赋值1,对图像中的其它像素点赋值0。处理器30可确定图像中的赋值为1的所有像素点、即亮度高于分割阈值的所有像素点的坐标的集合G。在此,像素点的坐标为像素点在图像空间内的坐标。
通过对集合G内的点进行霍夫变换,可获得这些点在图像空间内所在的直线的表达式。下面结合图3对该过程进行描述。图3中,左图示意性地示出了图像空间,右图示意性地示出了对应的霍夫空间。
集合G内的每一个点可分别通过霍夫变换转变为霍夫空间中的一条映射线。图3中示例性地示出了图像空间中的两个点a和b经过霍夫变换后分别映射为霍夫空间中的直线A和B。在霍夫空间中,两条直线A和B在交点A’B’处相交,交点A’B’代表一条图像空间中的直线,该直线同时经过转换前的两个点a和b。
因此,集合G内的每一个点在霍夫空间中的所有映射线的交点中相交的映射线最多的交点c,d可代表图像空间中同时经过集合G中的点数量最多的直线。由此,通过相交的映射线最多的交点的交点坐标(c,d)能够确定代表反光区域11的目标直线的表达式:y=cx+d。直线形的反光区域尤其适用于通过霍夫变换来确定代表反光区域11的目标直线。
可选地,根据目标直线的表达式,从集合G中确定图像中的反光区域11的起点坐标和终点坐标,并且确定图像中的反光区域11的长度。例如,当长度大于长度设定值时,则判定安全带10处于工作状态。所述长度设定值尤其可设定为安全带10最大长度的一半。
图4示意性地示出了图1的实施例中的安全带10。反光区域11可在安全带10的整个长度上延伸。安全带10例如可包括作为安全带基体的织物带12。反光区域11可以以反光涂层13的形式施加在织物带12上,如图4中的下图所示。应理解,反光区域11也可以以其它方式实现,例如反光区域11可由缝制或粘附至织物带12的反光片形成。
下面回到图1和图2进行仅一步的说明。在该实施例中,图像传感器20获取的图像覆盖理论上的头部区域60,处理器30可检测图像中是否包含人脸图像以判断是否有乘客乘坐。理论上的头部区域60表示在乘客在座椅上的正常乘坐状态下,乘客的头部通常在图像中所处的区域。处理器30可利用神经网络来检测图像中是否包含人脸图像。可选地,安全带组件可省去传统的座椅重量传感器及检查安全带锁扣状态的碰触传感器,由此可节约成本并且避免因放置重物而导致的重量传感器误报。
可选地,处理器30可在分割出高亮区域之前,从图像中分割出安全带检测区域70,并仅在安全带检测区域70内进行高亮区域的分割和提取。安全带检测区域70可根据图像传感器20与安全带10的相对位置预先标定。
安全组件还可包括警示装置40。所述警示装置40例如可包括音响41、显示屏42或警示灯等。如果在有乘客乘坐的情况下判定安全带10未处于工作状态,则处理器30可将警示信号发送至警示装置40,使得警示装置40发出警示信息。所述警示信息尤其可包括声音信息、图标信息或灯光信息。
图5示意性地示出了根据本发明的一个示例性实施例的用于检测安全带10使用状态的方法。所述方法可利用上文所述的安全带组件来执行。
在所述方法中,当检测到车辆的速度超过车速阈值、例如20kM/h时,图像传感器20可获取安全带10的图像并将所述图像发送至处理器30。
处理器30可从图像中分割出头部区域60,并检测图像是否包含人脸图像,若是,则表示座椅上有乘客乘坐,若否,则表示无乘客乘坐。在无乘客乘坐的情况下,无需继续检测安全带10的使用状态。
在有乘客乘坐的情况下,继续检测安全带10的使用状态。处理器30可从图像中分割出安全带检测区域70。然后,利用直方图计算亮度分割阈值,并利用分割阈值从安全带检测区域70分割出高亮区域50。处理器30进一步利用霍夫变换计算高亮区域50内的像素点所在的直线,并由此计算出图像中的反光区域11的长度。将所述长度与长度设定值进行对比,可判断安全带是否处于工作状态。例如,当所述长度大于长度设定值时,则判定安全带10处于工作状态,当所述长度不大于长度设定值时,则判定安全带10处于非工作状态。
如果判定安全带10处于非工作状态,则处理器30可将警示信号发送至警示装置40,使得警示装置40发出警示信息。
应理解,本文中针对安全带组件说明的特征和优势同样适用于用于检测安全带10的使用状态的方法。
尽管这里详细描述了本发明的特定实施方式,但它们仅仅是为了解释的目的而给出的,而不应认为它们对本发明的范围构成限制。在不脱离本发明精神和范围的前提下,各种替换、变更和改造可被构想出来。
- 用于检测安全带的使用状态的方法、安全带组件及车辆
- 车辆、用于判定座椅安全带佩戴状态的系统,以及判定座椅安全带佩戴状态的方法