一种基于反步法控制的舰载机着舰固定时间容错控制方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明提供一种基于反步法控制的舰载机着舰固定时间容错控制方法,它提供一种在考虑参数不确定、未知干扰以及执行器故障的情况下,舰载机着舰的新容错控制方法,属于舰载机自动控制技术领域。
背景技术
近年来,为了增强航空母舰/舰载机系统的整体作战能力,对于舰载机着舰轨迹跟踪控制的研究和实际应用越来越多。舰载机在作战过程中不仅可针对海、陆、空进行精准目标打击,还能完成侦查、预警、电子对抗等多样的精密作战任务,是航空母舰战斗力的主要体现。舰载机的飞控系统通过驾驶员、自动驾驶仪和其他控制单元的指令转换成电信号、机械信号和液压信号来控制舰载机执行器的舵面位置,以控制其在期望轨迹中飞行。在着舰过程中,为了能够以一个适合的姿态触舰,舰载机需要保持较小的速度下滑,并需维持较高的航迹控制精度,从而实现安全降落。但在实际情况下,舰载机在飞行过程中干扰因素较多,比如外界干扰因素阵风和大气紊流或是舰载机内部执行器发生未知故障都会造成系统性能改变甚至恶化。对于未知干扰因素,仅仅利用传感器很难进行精准测量,同时,故障信息具有在时间和地点的不确定性和未知性,因此,针对舰载机容错控制研究的重要性不言而喻。通过在系统中加入容错控制,使得舰载机能够在出现系统故障、性能变差的情况下,仍然可以安全地航行或降落。滑模干扰观测器和扩张观测器是广泛应用于未知干扰及故障估计补偿的方法,但这些方法没有结合固定时间控制理论降低系统误差收敛时间,然而衡量舰载机着舰性能的一个重要指标就是舰载机轨迹跟踪误差的收敛时间。因此,需要提出一个性能更好、可靠性更高且收敛时间更快的舰载机着舰容错控制方法。
本发明“一种基于反步法控制的舰载机着舰固定时间容错控制方法”基于以上问题进行考虑,而提出可靠的,解决参数不确定、外界干扰以及执行器故障下的舰载机容错问题的控制理论。通过惯性坐标系下舰载机的六自由度模型,将其在故障情况下的跟踪期望轨迹问题拆分为位置跟踪、姿态跟踪及迎角跟踪问题。其中,使用固定时间干扰观测器对外界干扰及执行器故障进行估计和补偿估计。同时,引入固定时间控制方法降低系统的收敛时间,使舰载机在固定时间内将轨迹跟踪误差收敛到零的一个小邻域内。通过李雅普诺夫稳定性分析以及模拟仿真,证明所设计控制器在执行器故障情况下容错能力较高,舰载机可以在发生故障后的固定时间内将轨迹跟踪误差收敛到零的一个小邻域内,并保证系统全局一致有界。
发明内容
1.目的:本发明的目的在于提供一种基于反步法控制的舰载机着舰固定时间容错控制方法,控制工程师可以在结合实际参数的同时,按照该方法实现舰载机抗扰动、抗执行器故障的轨迹跟踪控制。
工程师可以在结合实际参数的同时,按照该方法实现舰载机抗扰动、抗执行器故障的轨迹跟踪控制。
2.技术方案:本发明“一种基于反步法控制的舰载机着舰固定时间容错控制方法”,其主要内容及步骤是:
首先给定惯性坐标系下舰载机考虑外界干扰及执行器故障时的六自由度模型,然后针对该模型进行控制器设计。该方法依据有效输入分为距离控制、姿态控制以及自动油门控制三部分,因此控制律也相应的由三部分组成:距离控制律、姿态控制律以及自动油门控制律。这三种控制律都基于反步法进行设计。由该方法计算得到的实际输入控制量将传输至操纵面及发动机等执行机构,即可实现舰载机容错控制功能。
本发明“一种基于反步法控制的舰载机着舰固定时间容错控制方法”,其具体步骤如下:
步骤一 建立惯性坐标系下舰载机的六自由度严格反馈非线性仿射模型。
步骤二 距离控制设计:给定一条期望轨迹,由位置误差计算得到位置虚拟控制律,由虚拟控制律进一步推出控制航向角和爬升角的虚拟输入控制律,并使用固定时间干扰观测器对外界干扰进行估计及补偿,以此减小舰载机与参考轨迹之间的距离差。
步骤三 角度控制设计:计算角度误差,并由角度误差计算得到角度虚拟控制律,由虚拟控制律进一步推出控制俯仰角、侧滑角以及滚转角角速度的实际输入控制律,并使用固定时间干扰观测器对外界干扰及执行器故障进行估计及补偿,以此减小舰载机与参考轨迹之间的角度差。
步骤四 自动油门控制设计:计算迎角误差,并由迎角误差计算得到实际输入控制律,即自动油门控制律,并使用固定时间干扰观测器对外界干扰进行估计及补偿,以减小迎角误差。
其中,在步骤一中所述的六自由度严格反馈非线性仿射模型如下:
建立惯性坐标系下舰载机六自由度模型,如附图1所示。O
上述方程中,x
f
上式中,m为质量,σ表示安装角,T表示当前推力,T
其中,在步骤二中所述的距离控制设计,方法如下:
给定期望轨迹,得到期望位置坐标x
ε
式中位置误差为ε
选取李雅普诺夫函数为
虚拟控制律ν为:
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰d
其中,σ>0且
可求得期望俯仰角θ
其中,在步骤三中所述的角度控制设计方法如下:
由步骤二中所得期望俯仰角θ
ε
选取李雅普诺夫函数为
实际控制律u
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰Δ
其中,σ
其中,在步骤四中所述的自动油门控制设计方法如下:
给定期望迎角α
ε
选取李雅普诺夫函数为
则设计如下实际控制律δ
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰d
其中,σ
上述所设计舰载机着舰固定时间容错控制方法系统各跟踪误差在受到执行器故障后均可在固定时间T内收敛到零的一个小邻域内,T为
3.优点及效果:
本发明“一种基于反步法控制的舰载机着舰固定时间容错控制方法”,与现有技术比,其优点是:
1)本方法能够有效解决容错问题,大幅度改善了由于执行器故障所引起的控制性能恶化。
2)本方法采用固定时间干扰观测器有效的估计和补偿了模型不确定性、外界干扰以及执行器故障对控制器性能造成的不利影响;
3)在执行器发生故障后,系统各状态参量误差均能在固定时间内收敛到零的一个小邻域内。
4)本方法可保证系统的全局一致有界;
附图说明
图1为本发明坐标系示意图;
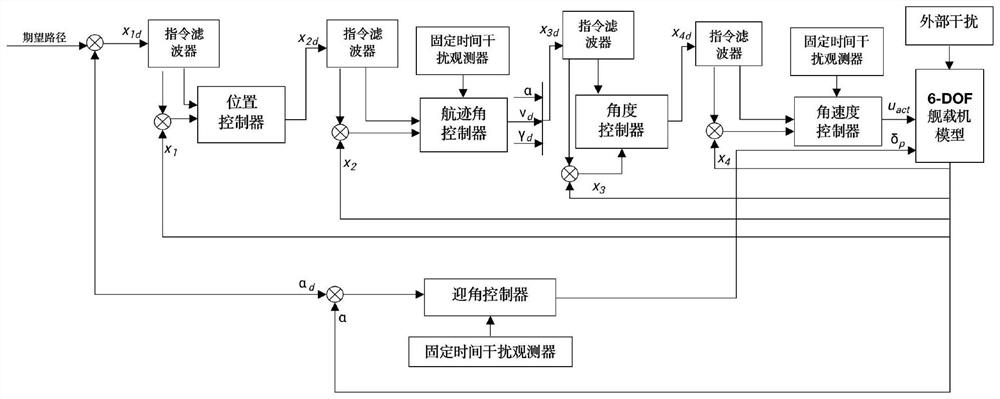
图2为本发明控制系统框架示意图;
符号说明如下:
x
x
x
x
α α为舰载机当前迎角;
ν ν=[sinμ,αcosμ]
u
δ
d
Δ
L
x
x
ε
ε
ε
ε
x
k
k
z
λ
l
T
T 舰载机着舰系统误差收敛的固定时间;
具体实施方式
下面对本发明中的各部分设计方法作进一步的说明:
本发明“一种基于反步法控制的舰载机着舰固定时间容错控制方法”,其具体步骤如下:
步骤一:建立惯性坐标系下舰载机的六自由度严格反馈非线性仿射模型
建立惯性坐标系下舰载机六自由度模型,如附图1所示。O
上述方程中,x
f
上式中,m为质量,σ表示安装角,T表示当前推力,T
步骤二:距离控制设计
给定期望轨迹,得到期望位置坐标x
ε
式中位置误差为ε
选取李雅普诺夫函数为
虚拟控制律ν为:
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰d
其中,σ>0且
可求得期望俯仰角θ
步骤三:角度控制设计
由步骤二中所得期望俯仰角θ
ε
选取李雅普诺夫函数为
实际控制律u
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰Δ
其中,σ
步骤四:自动油门控制设计
给定期望迎角α
ε
选取李雅普诺夫函数为
则设计如下实际控制律δ
固定时间干扰观测器设计为:
其中k
上述固定时间干扰观测器设计可在固定时间内准确估计未知干扰d
其中,σ
上述所设计舰载机着舰固定时间容错控制方法系统各跟踪误差在受到执行器故障后均可在固定时间T内收敛到零的一个小邻域内,T为
- 一种基于反步法控制的舰载机着舰固定时间容错控制方法
- 一种基于受限反步法控制的舰载机着舰固定时间轨迹跟踪方法