一种飞行器磁背景自动补偿方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明属于航空技术领域,涉及一种飞行器磁背景自动补偿方法。
背景技术
针对飞行器平台自身固有磁背景噪声的探测,需要操纵飞行器分别在北、东、南、西4个方向进行横滚、俯仰等机动动作,通过飞行器平台动态切割地磁感线,获得平台动态状态下X、Y、Z三轴上投影的磁通量,从而得到飞行器平台固有的磁通量即磁背景噪声,而得到飞行器平台固有的磁背景噪声用于飞行器平台空中进行磁背景探测时,通过算法抵消平台自身磁背景噪声,从而提高传感器在复杂磁环境中提取目标的概率,该探测方式称为磁补偿探测。
目前,磁补偿探测均采用人工方式进行,即飞行员按照4个方向上进行磁补偿所需的横滚、俯仰机动动作要求,通过人工飞行方式实现,得到飞行器平台磁背景噪声数据。
该方法主要存在以下缺点:1.需要大量、多次、重复的人工操作,增加飞行员工作负荷;2.若人工飞行未到达预期效果,造成磁补偿效果差,需人工再次进行重复飞行工作,大大增加人员工作量;3.人工操纵飞行器产生机动动作较突然,机动动作之间过度不平滑,人员飞行体验较差。
发明内容
本发明克服了现有技术中的不足,提供了一种飞行器磁背景自动补偿方法,实现飞行器磁背景自动补偿。
本发明提供一种飞行器磁背景自动补偿方法,所述方法包括:
飞行器在预设飞行高度和预设飞行速度下,进入预定航线,所述预定航线为预先设置的由北、东、南、西四个方向形成的四边形航迹图;
根据磁补偿飞行姿态,自动完成飞行机动动作,并获取四个方向上的飞行器磁背景噪声;
根据所述四个方向上的飞行器磁背景噪声,得到飞行器的磁背景噪声;
飞行器在低空飞行需要对目标进行探测时,根据所述磁背景噪声,抵消飞行器自身的磁背景噪声,以便捕捉待探测目标。
具体的,磁补偿飞行姿态包括横滚机动动作,所述俯仰机动动作为飞行器在20秒±2秒时间内连续3次完成一个的俯仰角度依次变化0°~+5°~0°~-5°~0°、高度变化±100米,俯仰时航向不变的飞行动作。
具体的,磁补偿飞行姿态包括俯仰机动动作,所述横滚机动动作为飞行器在20秒±2秒时间内连续3次完成一个的横滚角度依次变化0°~+10°~0°~-10°~0°、横滚机动时航向角偏离≤15°,横滚完成后航向保持,横滚时高度不变的飞行动作。
具体的,所述预设飞行高度为3200米±200米。
具体的,所述预设飞行速度为370km/h~400km/h。
具体的,根据所述磁背景噪声,抵消飞行器自身的磁背景噪声,具体包括:
根据所述磁背景噪声,利用滤波算法,抵消飞行器自身的磁背景噪声。
具体的,所述滤波算法包括卡尔曼算法、加权递推平均滤波算法。
具体的,所述飞行器通过显示器显示,磁补偿飞行姿态的种类、磁补偿飞行方向、磁补偿四个方向上飞行器磁背景噪声的有效性。
本发明提供了一种自动探测磁背景噪声的方法,大大提高了工作效率和飞行体验,降低了人员工作负荷。
附图说明
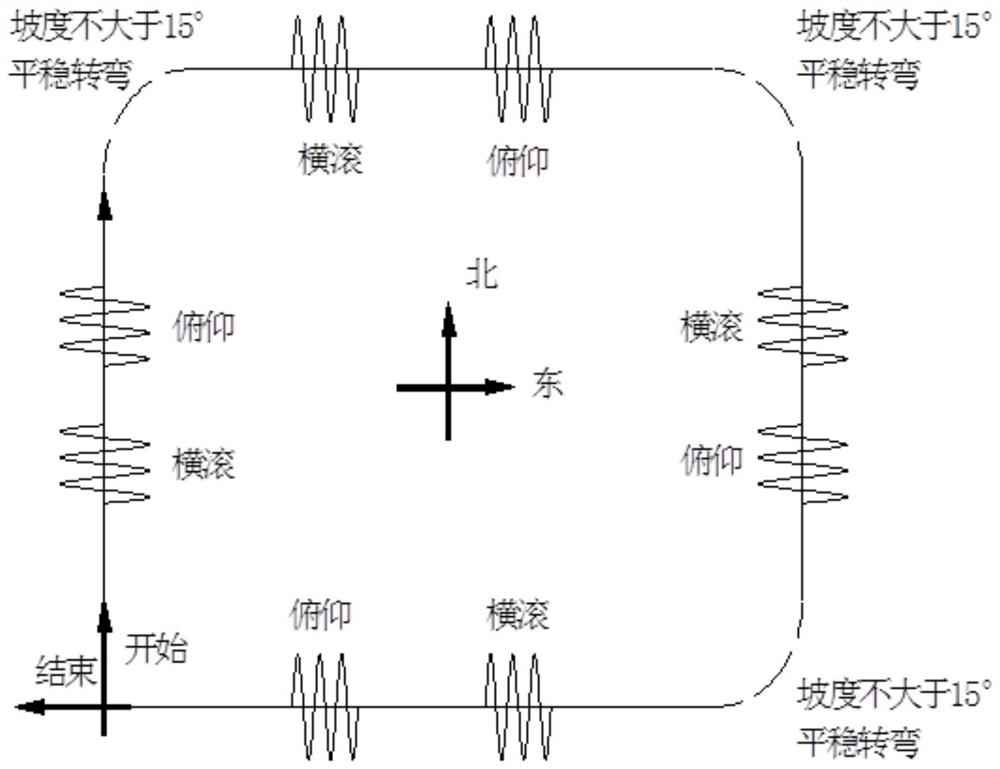
图1是本申请提供的一种飞行器磁补偿飞行航迹示意图。
具体实施方式
本发明属于航空技术领域,涉及用于磁背景自动补偿的方法,本发明改善了以往人工探测磁背景噪声的工作负荷,提高了飞行效率和飞行体验。
实施例一
本发明提供一种飞行器磁背景自动补偿方法,所述方法包括:
飞行器在预设飞行高度和预设飞行速度下,进入预定航线,所述预定航线为预先设置的由北、东、南、西四个方向形成的四边形航迹图;
根据磁补偿飞行姿态,自动完成飞行机动动作,并获取四个方向上的飞行器磁背景噪声;
根据所述四个方向上的飞行器磁背景噪声,得到飞行器的磁背景噪声;
飞行器在低空飞行需要对目标进行探测时,根据所述磁背景噪声,抵消飞行器自身的磁背景噪声,以便捕捉待探测目标。
具体的,磁补偿飞行姿态包括横滚机动动作,所述俯仰机动动作为飞行器在20秒±2秒时间内连续3次完成一个的俯仰角度依次变化0°~+5°~0°~-5°~0°、高度变化±100米,俯仰时航向不变的飞行动作。
具体的,磁补偿飞行姿态包括俯仰机动动作,所述横滚机动动作为飞行器在20秒±2秒时间内连续3次完成一个的横滚角度依次变化0°~+10°~0°~-10°~0°、横滚机动时航向角偏离≤15°,横滚完成后航向保持,横滚时高度不变的飞行动作。
具体的,所述预设飞行高度为3200米±200米。
具体的,所述预设飞行速度为370km/h~400km/h。
具体的,根据所述磁背景噪声,抵消飞行器自身的磁背景噪声,具体包括:
根据所述磁背景噪声,利用滤波算法,抵消飞行器自身的磁背景噪声。
具体的,所述滤波算法包括卡尔曼算法、加权递推平均滤波算法。
具体的,所述飞行器通过显示器显示,磁补偿飞行姿态的种类、磁补偿飞行方向、磁补偿四个方向上飞行器磁背景噪声的有效性。
实施例二
结合附图对本发明一种武器拉脱插头的快速紧固装置作详细说明:
为解决上述技术问题,本发明通过以下技术方案实现,为实现飞行器磁背景自动补偿。利用自动飞行模式替代人工飞行模式,可有效解决人工磁补偿方式的技术问题。首先,需要在自动驾驶仪中增加自动磁补偿模态。磁补偿飞行模态中包含横滚、俯仰两种机动动作,其中俯仰飞行在20秒±2秒时间内完成一个完整的0°~+5°~0°~-5°~0°(误差±1°,抬头为-),飞行动作,连续3次,高度变化±100米,俯仰时航向不变;横滚飞行在20秒±2秒时间内完成一个完整的0°~+10°~0°~-10°~0°(误差±2°,右倾为-),飞行动作,连续3次,横滚机动时航向角偏离≤15°,横滚完成后航向保持,横滚时高度不变。自动驾驶仪中设计该要求下的飞行方式,引入自动磁补偿模态,即可实现自动磁补偿,因此,在自动驾驶仪中增加自动磁补偿模态具有可行性。其次,设计实现自动磁补偿使用流程。在飞行器进入飞行高度(绝对气压高度)为3200米±200米,飞行速度具备370km/h~400km/h,任务机组在任务显控界面中生成由北、东、南、西4个方向形成的四边形航迹图(飞行器沿四边形航迹飞行顺时针或逆时针均可,可从任意航向开始动作),具体如图1所示。生成的航迹图通过总线传输至座舱综合显示系统,在驾驶舱综合显示屏中显示(驾驶舱综合显示屏为座舱综合显示系统配套单元),驾驶员通过远距导航/水平导航引导飞行器进入预定航线,此时,在高度保持和航向保持模态工作下人工启动点亮自动磁补偿模态,进行某个方向的该组磁补偿机动动作(横滚、俯仰为一组),同时,驾驶舱综合显示屏实时提示该方向横滚、俯仰机动动作完成进度,该组机动动作完成后,自动驾驶仪自动磁补偿模态结束信号引入座舱综合显示系统,驾驶舱综合显示屏同步提示该方向磁补偿机动动作结束,此时,自动磁补偿模态开关按键已复位熄灭,传感器将此次获得的数据进行优劣评比,并将优劣高低位结果状态字通过总线传输至座舱综合显示系统和任务组综合战术与管理系统,驾驶舱综合显示屏和任务组显控界面同步提示该方向自动磁补偿效果。该方向自动磁补偿完成后自动驾驶仪自动恢复为高度保持和航向保持模态,驾驶员人工启动远距导航/水平导航进入预先设定下一个方向航线,进入预定航线后人工启动自动磁补偿模态进行下一个方向自动磁补偿。如果某个方向磁补偿效果评比较差,在完成预先四边形航线磁补偿后,由任务组在显控界面生成该方向新的航迹规划,通过总线传输至座舱综合显示系统,在驾驶舱综合显示屏中显示,驾驶员通过远距导航/水平导航引导飞行器进入该方向预定航线,在高度保持和航向保持模态工作下人工启动自动磁补偿模态,补充进行该方向上的磁补偿,直至最终达到较优的磁补偿效果评比。
- 一种飞行器磁背景自动补偿方法
- 一种背景磁场未知情形下的多磁偶极子磁源反演定位方法