电流控制装置
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及一种电流控制装置,特别涉及控制流过作为电感性负载的螺线管的电流的电流控制装置。
背景技术
车辆用自动变速器等所使用的螺线管的电流控制装置测量流过螺线管的电流值,以这些电流值与所期望的电流值一致的方式向脉冲宽度调制信号(以下称为PWM信号。)进行反馈,来控制电流,该PWM信号调整控制向螺线管的通电的开关元件的导通、断开时刻。
图9表示电流控制装置的现有例。图9所示的现有的电流控制装置500在与电池电源(VB)150串联连接的高侧开关元件40和低侧开关元件50的连接点上连接有螺线管110的一端,螺线管110的另一端与接地电源(GND)120连接,根据来自微型控制器200(以下有时称为微型计算机。)的PWM信号(PMW_IN1)11,排他地导通、断开控制上述高侧开关元件40和低侧开关元件50,向螺线管110供给电流。在PWM信号11为高电平时,使高侧开关元件40导通,使低侧开关元件50断开,从电池电源150经由高侧开关元件40向螺线管110供给电流。另一方面,在PWM信号11为低电平时,使低侧开关元件50导通,使高侧开关元件40断开,停止来自电池电源150的电流供给。在此,当从电池电源150供给的电流被切断时,由于在螺线管110中产生反电动势,所以从接地电源(GND)160经由低侧开关元件50供给电流,使蓄积在螺线管110中的能量释放。向螺线管110供给的电流根据PWM信号11的极性,经由高侧开关元件40或低侧开关元件50而被供给,但通过调整PWM信号11的高电平时间÷PWM信号周期(以下称为占空比。)来控制供给的电流。
在这样的电流控制装置500中,通常具备:HS(高侧)电流测量电路60,其检测、测量经由高侧开关元件40流过螺线管110的电流值;LS(低侧)电流测量电路70,其检测、测量经由低侧开关元件50流过螺线管110的电流值;电流计算电路80,其基于HS电流测量电路60以及LS电流测量电路70的电流检测结果,求出反馈控制所需的一定期间的平均电流值并传送到微型计算机200;以及开关控制电路30,其接受来自微型计算机200的PWM信号(PMW_IN1)11,生成针对高侧开关元件40的高侧开关元件控制用PWM信号31(以下,有时仅称为PWM信号31。)以及针对低侧开关元件50的低侧开关元件控制用PWM信号32(以下,有时仅称为PWM信号32。),且执行高侧开关元件40和低侧开关元件50的导通、断开的开关控制(也称为栅极控制。),由高侧开关元件40、低侧开关元件50以及上述的各种电路构成向作为电感性负载的螺线管110供给电流的负载驱动电路(同步整流电路)10。
另外,在利用这样的电流控制装置500来控制多个螺线管的情况下,在电流控制装置500内配备与各螺线管对应的负载驱动电路也是已知的(例如,参照下记专利文献1等)。
现有技术文献
专利文献。
专利文献1:国际公开第2017/057682号
发明内容
发明要解决的问题
在与电流控制装置连接的螺线管的一端与接地电源接地的情况下,从电流控制装置向螺线管供给电流。在来自微型控制器的PWM信号的占空比为“0”时,电流值为最小值的“0”,通过增大占空比,向螺线管供给的电流量增加,因此,在该电流控制装置中,不能控制从螺线管向成为电流控制装置方向的与通常相反方向的电流。但是,在发生了电子控制装置、螺线管的地线断线等的异常的情况下,有时会产生不期望的反向电流。
图10表示电流控制装置的其他现有例。图10所示的现有的电流控制装置600控制各螺线管的一端与共通的接地点(接地电源)连接的多个螺线管。在1个螺线管110a由(从微型计算机200发送到负载驱动电路10a的)低占空比的PWM信号(PMW_IN1)11a来控制,且另一个螺线管110b由(从微型计算机200发送到负载驱动电路10b的)比较高占空比的PWM信号(PMW_IN2)11b来控制的情况下,例如当电流控制装置600和接地电源160断线时,由于与接地电源160连接的节点170成为高阻抗而容易变动,因此从电流控制装置600向螺线管110b的比较大的电流Is向使节点170的电位降低的方向作用。于是,流过螺线管110b的电流从螺线管110a经由由于低占空比的PWM信号11a而基本持续导通状态的低侧开关元件50,流入电流控制装置600的节点170,使反向电流Irev产生。
螺线管有时也会因反向电流而使阀进行开闭动作,例如,在控制锁止离合器的断续的螺线管中,有可能由于产生的反向电流而导致不期望的锁止联接,产生变速冲击。
针对这样的问题,在上述专利文献1所记载的现有技术中,在相对于电流的指示值,检测出的流过螺线管的电流值低,或者检测出反向电流的情况下,判断为向螺线管的共通的接地点的断线异常,向停止全部螺线管的方向进行控制。但是,这是作为各螺线管的一端为共通的接地点的断线异常来处置的,断开全部螺线管,因此由此产生变速冲击的可能性高。
本发明是鉴于上述问题而完成的,其目的在于提供一种能够防止由于流过反向电流而产生不期望的阀动作,并且对于处于正常反馈控制的螺线管,能够继续进行反馈控制的电流控制装置。
解决问题的技术手段
为了解决上述问题,本发明的电流控制装置的特征在于,具备:高侧开关元件,其使螺线管与电池电源导通,所述螺线管的一端接地至接地电源;以及低侧开关元件,其与接地电源导通,该电流控制装置具有:开关控制电路,其通过使高侧开关元件和低侧开关元件的一方导通、使另一方断开来控制向所述螺线管的供给电流;以及时间测量电路,其测定低侧开关元件的导通持续时间。
发明的效果
根据本发明,具备:高侧开关元件,其使螺线管与电池电源导通,所述螺线管的一端接地至接地电源;以及低侧开关元件,其与接地电源导通,该电流控制装置具有:开关控制电路,其通过使高侧开关元件和低侧开关元件的一方导通、使另一方断开来控制向所述螺线管的供给电流;以及时间测量电路,其测定低侧开关元件的导通持续时间。并且,当由时间测量电路测定出的低侧开关元件的导通持续时间到达规定时间时,开关控制电路在使高侧开关元件断开的状态下暂时使低侧开关元件断开。
即,为了防止反向电流,利用低占空比的PWM信号来控制向螺线管供给的电流,特别是在利用与电流“0”的指示电流值相当的占空比的PWM信号进行控制的情况下,该状态经过一定时间后,暂时使低侧开关元件断开,预先切断反向的电流路径。如果接收到表示指示电流值为不是“0”的一定值以上的PWM信号,则解除低侧开关元件的断开固定,恢复到高侧开关元件、低侧开关元件中的某一方成为导通的通常的同步整流动作。
由此,能够以更简单的方法切断螺线管的反向电流的路径,防止因反向电流流动而产生不期望的阀动作,并且能够对于能够进行正常反馈控制的螺线管继续反馈控制。其结果是,在控制锁止离合器的断续的螺线管中,例如能够在地线断线时防止不期望的锁止联接,并且能够抑制变速冲击的产生。
上述以外的课题、构成及效果通过以下的实施方式的说明而明确。
附图说明
图1是表示本发明的第1实施方式的构成图。
图2是表示本发明的第1实施方式的变形例的构成图。
图3是表示本发明第1实施例的动作波形例1的图。
图4是表示使图3的阈值时间依存于检测电流值的情况下的动作波形例的图。
图5是简单地求出图4的阈值时间的说明图。
图6是表示本发明的第1实施例的动作波形例2的图。
图7是表示本发明的第2实施方式的构成图。
图8是表示本发明的第2实施方式的动作波形例的图。
图9是现有的电流控制装置的构成图。
图10是表示现有的电流控制装置中的课题的一例的构成图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。另外,由于附图是简略性的,因此不能以该附图的记载为依据来狭义地解释本发明的技术范围。另外,在本说明书的说明中,对相同的要素赋予相同的符号,省略重复的说明。
[第1实施方式]
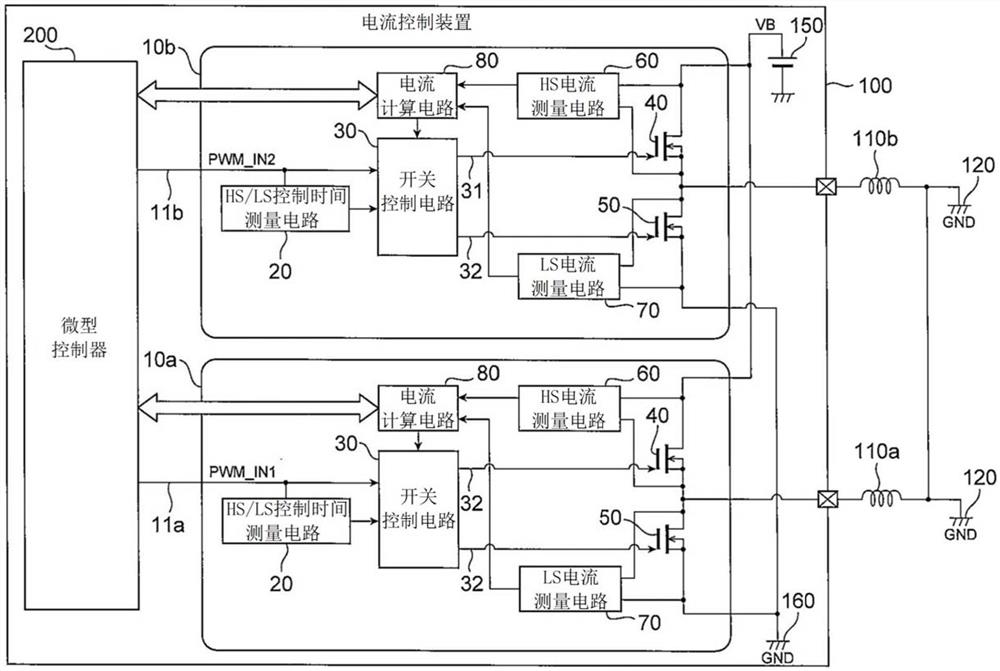
图1是本发明的第1实施方式的车辆自动变速器用的电流控制装置的构成图。
图示实施方式的电流控制装置100由微型计算机200和向多个螺线管110a、110b供给电流的负载驱动电路10a、10b构成。在此,为了简化附图,将多个螺线管以及负载驱动电路省略为2个(2组),但个数没有限定。另外,负载驱动电路10a、10b都与螺线管110a、110b的一端连接,该螺线管110a、110b向与电池电源(VB)150串联连接的高侧开关元件40和低侧开关元件50的连接点供给电流,螺线管110a、110b的另一端与共通的接地电源(GND)120连接(接地)。微型计算机200计算车辆自动变速器系统所需的应向螺线管110a、110b供给的电流,将该电流值作为指示电流值,向负载驱动电路10a、10b输出控制高侧开关元件40和低侧开关元件50的导通、断开时刻的PWM信号11a、11b。
由于负载驱动电路10a和负载驱动电路10b各自的构成、动作基本相同,所以以下以与螺线管110a对应设置的负载驱动电路10a的构成、动作为中心进行说明。
接受到PWM信号11a的负载驱动电路10a通过开关控制电路30,在PWM信号11a为高电平时,以使高侧开关元件40导通、使低侧开关元件50断开的方式生成PWM信号31、32,从电池电源150经由高侧开关元件40向螺线管110a供给电流。另一方面,在PWM信号11a为低电平时,以使高侧开关元件40断开、使低侧开关元件50导通的方式生成PWM信号31、32,切断来自电池电源150的电流供给,并且通过从接地电源(GND)160经由低侧开关元件50向螺线管110a供给电流,使蓄积在螺线管110a中的能量释放。高侧开关元件40、低侧开关元件50在从导通到断开、从断开到导通的切换中需要转变时间,因此对PWM信号31、32附加为了使高侧开关元件40和低侧开关元件50都不导通而在导通、断开切换的时刻使双方进行断开控制的期间(以下,称为死区时间期间。)。由此,向螺线管110a供给的电流可以通过改变PWM信号11a的占空比来增减,PWM信号11a的占空比以修正由微型计算机200所计算出的指示电流值与对应于该占空比的PWM信号11a的流过螺线管110a的电流值的差分的方式进行反馈控制,从而实现向螺线管110a的供给电流的控制。流过螺线管110a的电流值由HS电流测量电路60、LS电流测量电路70针对每个高侧开关元件40、低侧开关元件50来检测。实际上,基于该电流检测结果,通过电流计算电路80,求出反馈控制所需的一定期间的平均电流值,并传送到微型计算机200。
除了上述构成之外,在本第1实施方式中,为了测定高侧开关元件40、低侧开关元件50的导通(或断开)控制时间(也称为导通持续时间。),具备测定PWM信号11a的高电平期间、低电平期间的HS/LS控制时间测量电路20。例如,由于电流控制装置100的GND连接线的断线等,不经意地从螺线管110a向电流控制装置100侧产生反向电流是在低侧开关元件50导通的期间,并且是向螺线管110a供给的电流值少的情况。特别是如果螺线管110a的指示电流值在“0”附近,则其风险变高。因此,通过HS/LS控制时间测量电路20来测定PWM信号11a的高电平期间、低电平期间,在PWM信号11a的低侧开关元件50的导通期间足够长,并且指示电流值被识别为“0”的情况下,通过开关控制电路30暂时使低侧开关元件50断开,将反向电流的产生防止于未然。
在此,可以通过HS/LS控制时间测量电路20来测定低侧开关元件50的导通控制时间(导通持续时间)而用于控制,也可以测定高侧开关元件40的断开控制时间(断开持续时间),由此检测低侧开关元件50的导通控制时间(导通持续时间)。
另外,在图1中,HS/LS控制时间测量电路20针对PWM信号11a(在开关控制电路30的上游)设置,但只要能够测定高侧开关元件40、低侧开关元件50的导通(或断开)控制时间即可,考虑控制时刻,如图2所示,也可以针对PWM信号31、PWM信号32(在开关控制电路30与高侧开关元件40、低侧开关元件50之间)设置。在图1所示的例子中,能够更快地测定导通(或者断开)控制时间,在图2所示的例子中,能够更准确地测定导通(或者断开)控制时间。
图3表示第1实施方式中的防止反向电流的产生的功能的动作时序图。另外,以下为了简单,在作为高侧开关元件40、低侧开关元件50的控制信号的PWM信号31、32中省略死区时间期间的明示。在图3中,首先表示在指示电流值为“0”的情况下,PWM信号11a的占空比成为0的最简单的例子。
PWM信号11a由周期tPWM_CYC控制,根据PWM信号11a的极性,通过开关控制电路30使高侧开关元件40、低侧开关元件50中的某一方(排他地)导通,控制向螺线管110a供给的电流。在此,通过HS/LS控制时间测量电路20,每当PWM信号11a从高电平切换为低电平时,测量与低侧开关元件50的导通时间相当的低电平期间(图3中,低侧导通时间测量),如果PWM信号11a的低电平期间比某一阈值时间tLS_OFF长,则使PWM信号32无效,通过开关控制电路30以暂时地使高侧开关元件40、低侧开关元件50都成为断开的方式来进行控制(换言之,以在使高侧开关元件40断开的状态下,使低侧开关元件50成为断开的方式进行控制),将反向电流的产生防止于未然。如果暂时将使低侧开关元件50断开的阈值时间tLS_OFF设定为低侧开关元件50以及高侧开关元件40的导通、断开的切换周期tPWM_CYC以上,则仅在指示电流值为“0”的PWM信号11a的占空比成为“0”的情况下,能够使该功能有效。暂时的高侧开关元件40、低侧开关元件50都成为断开的状态持续到PWM信号11a切换为高电平为止(即,直到产生作为使高侧开关元件40导通的控制指令的PWM信号11a,指示电流值不为“0”为止)。然后,恢复到按照PWM信号11a的极性的通常的PWM控制(即,同步整流动作)。
在此,虽然是PWM信号11a的低电平期间的阈值时间tLS_OFF,但在从低侧开关元件50向螺线管110a供给大的电流的期间使低侧开关元件50断开并不理想,因此需要等待时间直到电流减少到某种程度。这是因为,通常低侧开关元件50由MOSFET(Metal oxidesemiconductor field effect transistor,金属氧化物半导体场效应晶体管)形成,即使作为开关元件为断开,电流也会经由MOSFET的寄生二极管而流动,因此会产生预料之外的发热,另外,根据该电流测量电路的构成,不能测量在其间流动的电流值,在测量电流值中产生误差。向低侧开关元件50导通时的螺线管110a供给的电流值依存于低侧开关元件50的导通电阻、螺线管110a的阻抗、在高侧开关元件40导通期间蓄积在螺线管110a中的能量。
如果将低侧开关元件50的导通电阻设为Ron、将螺线管110a的电感设为Ls、将电阻值设为Rs、将高侧开关元件50导通时的峰值电流值设为I
[数式1]
I=Ipk*exp(-(Rs+Ron)*t/Ls)···(1)
另外,如果将t时间经过后的电流值设为Igoal,则该时间t成为以下的数式(2)。
[数式2]
t=Ls/(Rs+Ron)*In(Ipk/IgoaI)···(2)
在此,Ls、Rs、Ron是已知的,Ipk如图4所示,如果在PWM信号11a切换为低电平的时刻,获取通过使低侧开关元件50导通时的HS电流测量电路60、LS电流测量电路70向螺线管110a供给的电流值,则能够求出针对所期望的Igoal的tLS_OFF。Igoal优选是通过使低侧开关元件50断开而产生的应力(电流值)在装置电路器件(即电流控制装置100的负载驱动电路10a)的允许范围以下、在测量电流值的精度上误差为能够忽略的值。换言之,暂时使低侧开关元件50断开的阈值时间tLS_OFF(针对所述Igoal求出的tLS_OFF)优选设定为如下这样的时间:通过切断从低侧开关元件50流向螺线管100a的电流而产生的应力(电流值)减少到该装置电路器件(即电流控制装置100的负载驱动电路10a)的容许范围以下的电流值。另外,关于上述的数式(2)中的ln()的计算,如图5所示,可以通过将针对每个PWM周期获取到的Ipk分割为几个电流范围的1次近似式来求出的方法等容易地实现。另外,为了更简单,也可以假设(固定)PWM信号11a的占空比100%的最大电流值(=电池电压/(Rs+Ron))来计算Ipk。
另外,在上述的图3中,假设了指示电流值为“0”的PWM信号11a的占空比成为“0”的情况,但实际上,存在保持不是“0”的微小的占空比的情况(即,产生作为使高侧开关元件40导通的控制指令的PWM信号11a的情况)。图6表示防止指示电流值为“0”的PWM信号11a的占空比不为“0”的情况下(指示电流值为“0”但保持不为“0”的微小的占空比的情况下)的反向电流的产生的功能的动作时序图。另外,在图6中,明示了开关控制电路30中的输入输出,即,PWM信号31、32相对于PWM信号11a的用于确保判断时间的时间延迟(在此为tPWMLH_TH)。
与图3的情况相同,PWM信号11a由周期tPWM_CYC控制,根据PWM信号11a的极性,通过开关控制电路30使高侧开关元件40、低侧开关元件50中的某一方(排他地)导通,控制向螺线管110a供给的电流。在此,如上所述,通过HS/LS控制时间测量电路20,每当PWM信号11a从高电平切换为低电平时,测量与低侧开关元件50的导通时间相当的低电平期间,但如本例那样,在指示电流值为“0”、PWM信号11a的占空比不为“0”的情况下,PWM信号11a在每个周期tPWM_CYC变化为高电平。因此,通过HS/LS控制时间测量电路20来测定PWM信号11a(在图2所示的例子的情况下为PWM信号31)的高电平期间(即,高侧开关元件40的导通持续时间),如果测定出的高电平期间是小于能够判断为指示电流值相当于“0”的高电平期间的判定阈值tPWMLH_TH的时间,则低电平期间(即,低侧开关元件50的导通持续时间)的测量不初始化(或者中止)而直接继续。即,在该情况下,PWM信号11a(在图2所示的例子的情况下为PWM信号31)的高电平期间(高侧开关元件40的导通持续时间)的判定阈值tPWMLH_TH是根据将向螺线管110a供给的电流值控制为“0”时的高侧开关元件40的导通期间来设定的。并且,如果上述的低电平期间比某阈值时间tLS_OFF长,则使PWM信号32无效,通过开关控制电路30以暂时地使高侧开关元件40、低侧开关元件50都成为断开的方式进行控制(换言之,以在使高侧开关元件40断开的状态下使低侧开关元件50成为断开的方式进行控制),将反向电流的产生防止于未然。
在这种情况下,如果将阈值时间tLS_OFF设定为对周期tPWPW_CYC附加了tPWMLH_TH以及PWM信号31、32相对于PWM信号11a的时间延迟(在此为tPWMLH_TH)所得的值以上,则仅在指示电流值成为“0”的情况下,能够使该功能有效。该暂时的高侧开关元件40、低侧开关元件50都成为OFF的状态持续到PWM信号11a的高电平期间成为判定阈值tPWMLH_TH以上的信号被输入为止(即,直到产生作为使高侧开关元件40导通的控制指令的PWM信号11a为判定阈值tPWMLH_TH以上,指示电流值不为“0”为止)。由此,即使在指示电流值为“0”时PWM信号11a的占空比不为“0”的情况下,也能够将反向电流的产生防止于未然。
另外,上述的例子限定于指示电流值为“0”的情况,但是通过调整PWM信号11a的高电平期间的判定阈值tPWMLH_TH,成为与测量电流精度的折衷,但即使为不是“0”的指示电流值,也能够将反向电流的产生防止于未然。
如以上说明的那样,根据本实施方式,电流控制装置具备:高侧开关元件40,其使螺线管与电池电源导通,该螺线管的一端接地至接地电源;以及低侧开关元件50,其与接地电源160导通,电流控制装置具有:开关控制电路30,其通过使高侧开关元件40和低侧开关元件50的一方导通、使另一方断开来控制向所述螺线管110a、110b的供给电流;以及HS/LS控制时间测量电路(时间测量电路)20,其测定低侧开关元件50的导通持续时间。然后,当由HS/LS控制时间测量电路(时间测量电路)20测定出的低侧开关元件50的导通持续时间到达规定时间时,开关控制电路30在使高侧开关元件40断开的状态下暂时使低侧开关元件50断开。
即,为了防止反向电流,利用低占空比的PWM信号11a、11b来控制向螺线管110a、110b供给的电流,特别是在利用与电流“0”的指示电流值相当的占空比的PWM信号11a、11b来控制的情况下,该状态经过一定时间后暂时使低侧开关元件50断开,预先切断反向的电流路径。如果接收到表示指示电流值为不是“0”的一定值以上的PWM信号11a、11b,则解除低侧开关元件50的断开固定,恢复到高侧开关元件40、低侧开关元件50中的某一方成为导通的通常的同步整流动作。
由此,能够以更简单的方法切断螺线管的反向电流的路径,防止因反向电流流动而产生不期望的阀动作,并且能够对于能够进行正常反馈控制的螺线管继续反馈控制。其结果是,对于控制锁止离合器的断续的螺线管,例如能够在地线断线时防止不期望的锁止联接,并且能够抑制变速冲击的产生。
[第2实施方式]
上述的第1实施方式是将指示电流值为“0”或微小的指示电流值下的反向电流的产生防止于未然,但即使以某一定的指示电流来控制1个螺线管110a,在其他螺线管110b以非常大的电流动作的情况下,有时在该螺线管110a的低侧开关元件50为导通状态时产生反向电流。通过向螺线管供给的电流的反馈控制,以消除反向电流的方式进行控制,但通常为了这样的控制,以PWM周期为单位需要数个周期以上。因此,在检测到某个判定阈值以上的反向电流的情况下,也可以附加在该时刻使PWM信号32无效、暂时使低侧开关元件50断开、切断反向电流的功能。该功能可以与上述图3、图6的动作时序图所示的将指示电流值“0”、或者微小的指示电流值下的反向电流的产生防止于未然的功能并列设置。
图7是本发明的第2实施方式的车辆自动变速器用的电流控制装置的构成图。
本第2实施方式,相对于上述第1实施方式,追加了比较器71以及反向电流时间测量电路72,所述比较器71根据LS电流测量电路70向螺线管110a的电流值来检测某电流阈值Irev_th以上的反向电流,反向电流时间测量电路72测量反向电流的产生时间(期间),将该测量结果输入到开关控制电路30,用于高侧开关元件40和低侧开关元件50的导通、断开的开关控制(也称为栅极控制)。
即,如图8的动作时序图所示,通过比较器71以及反向电流时间测量电路72,在某时间阈值tDET_Irev以上检测某电流阈值Irev_th以上的反向电流,由此,如果检测到在低侧开关元件50中与通常相反方向的电流流过了判定阈值(规定电流)以上,则在该时刻使PWM信号32无效,通过开关控制电路30暂时使低侧开关元件50断开,切断反向电流。
另外,图7所示的构成是一例,只要能够检测到在低侧开关元件50中与通常相反方向的电流流过了规定电流以上,则也可以是其他的构成。
这样,根据本第2实施方式,电流控制装置具有LS电流测量电路70,该LS电流测量电路70测量向螺线管110a供给的电流值,并且该电流控制装置具有如下功能:如果通过该LS电流测量电路70检测到与通常相反方向的电流流过了规定电流以上,则开关控制电路30在使高侧开关元件40断开的状态下暂时使低侧开关元件50断开。即,在低侧开关元件50导通时检测到一定的反向电流的情况下,使低侧开关元件50断开,进一步切断反向的电流路径。
由此,能够可靠地防止因流过反向电流而产生不期望的阀动作。其结果是,与上述第1实施方式相同,对于控制锁止离合器的断续的螺线管,例如能够在地线断线时防止不期望的锁止联接,并且能够抑制变速冲击的产生。
另外,本发明不限于上述实施方式,还包括各种变形方式。例如,上述实施方式是为了容易理解地说明本发明而进行的详细说明,不一定限定于具备所说明的全部构成。另外,也可以将一个实施方式的构成的一部分置换为其他实施方式的构成,也可以在一个实施方式的构成中添加其他实施方式的构成。
另外,控制线、信号线展示的是认为在说明上需要的部分,在产品上不一定表示全部的控制线、信号线。
符号说明
10、10a、10b 负载驱动电路
11、11a、11b PWM信号
20 HS/LS控制时间测量电路(时间测量电路)
30 开关控制电路
31 高侧开关元件控制用PWM信号
32 低侧开关元件控制用PWM信号
40 高侧开关元件
50 低侧开关元件
60 HS电流测量电路
70 LS电流测量电路
71 比较器
72 反向电流时间测量电路
80 电流计算电路
100 电流控制装置
110、110a、110b 螺线管
120 螺线管接地电源
150 电池电源
160 电流控制装置接地电源
170 电流控制装置接地连接节点
200 微型控制器(微型计算机)。