一种智能裁剪机的机头结构
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及裁剪机技术领域,尤其涉及一种智能裁剪机的机头结构。
背景技术
裁剪机,用电动机带刀运转、激光束、高压水喷射以及冲模冲裁的方式将缝料切割、冲裁成所需形状的加工设备,裁剪机包括电动裁剪刀、冲裁机和自动裁剪机等,裁剪刀用电动替代手动(剪刀)裁剪面料的工具,根据刀片的形式可分为直刀、圆刀、角刀和带刀等,借助工作台,用手动的方式完成多层面料的裁剪,剪裁台带有裁剪装置的工作台。
裁剪机头主要用于柔性材料的裁剪行业,很多柔性材质本身特性限制,不能采用激光切割、水切割等切割形式,必须采用对材料本身伤害很小的机械切割高。
现有的裁剪机头悬臂较长,且主轴电机是上下联动结构,振动噪音很大,振动会导致裁剪精度的下降,进而影响裁剪的质量。
因此,有必要提供一种智能裁剪机的机头结构解决上述技术问题。
发明内容
本发明提供一种智能裁剪机的机头结构,解决了现有的裁剪机头会导致裁剪精度的下降的问题。
为解决上述技术问题,本发明提供的智能裁剪机的机头结构,包括:机头主体,所述机头主体上固定安装有主轴电机,所述主轴电机的输出端设置有同步带,所述机头主体上设置有刀盘组件,并且机头主体上设置有裁刀,所述机头主体上设置有打孔组件,并且机头主体上设置有偏心轮组件。
优选的,所述主轴电机通过传输轮与所述同步带连接,所述刀盘组件位于所述机头主体的底部,并且刀盘组件包括大刀盘和小刀盘。
优选的,所述打孔组件位于所述机头主体的一侧,所述偏心轮组件的内部设置有铅配重块和铁平衡块。
优选的,所述机头主体上固定安装有所述同步带的更换组件,所述更换组件包括安装板,所述安装板上滑动连接有推拉杆,所述推拉杆的内部螺纹连接有螺纹杆,所述螺纹杆的一端转动连接有传动块,所述推拉杆的内部滑动连接有滑动槽,所述滑动槽的内部滑动连接有支撑杆,所述支撑杆的一端固定安装有传动轮,所述推拉杆的表面套设有拉动簧,所述推拉杆的一端转动连接有传动板,所述传动板上固定安装有连接杆,所述安装板上固定安装有传动块,所述传动块上开设有定位槽。
优选的,所述安装板固定安装在所述机头主体上,并且安装板位于所述同步带的一侧,所述推拉杆的一端位于所述同步带的一侧。
优选的,所述螺纹杆的一端贯穿所述推拉杆的右侧且延伸至所述推拉杆的内部,所述传动块位于所述滑动槽的内部,并且传动块与所述滑动槽的内表面滑动连接。
优选的,所述传动轮位于所述同步带的左侧,并且传动轮与所述同步带转动连接,所述拉动簧位于所述安装板和所述传动板的中部,并且拉动簧的两端分别与所述安装板的表面和所述传动板的表面固定连接。
优选的,所述连接杆共设置有两个,两个所述连接杆对称分布在传动板的两侧,所述连接杆与所述传动块的表面滑动连接。
优选的,所述传动块为圆弧状,所述连接杆位于所述传动块的一侧,所述连接杆的一端与所述定位槽相适配。
与相关技术相比较,本发明提供的智能裁剪机的机头结构具有如下有益效果:
本发明提供一种智能裁剪机的机头结构,在设备运行时通过铅配重块和铁平衡块组合降低偏心运转抖动问题,降低噪音的同时给予一个稳定的上下裁切的势能,安装在偏心装置上面的裁刀就可以实现高精度机械裁切,刀盘组件采用大小刀盘结构,大刀盘压住裁剪材料,防止移动,小刀盘进行直线、曲线、旋转等动作的裁切,使得裁切更稳定、精度更高。
附图说明
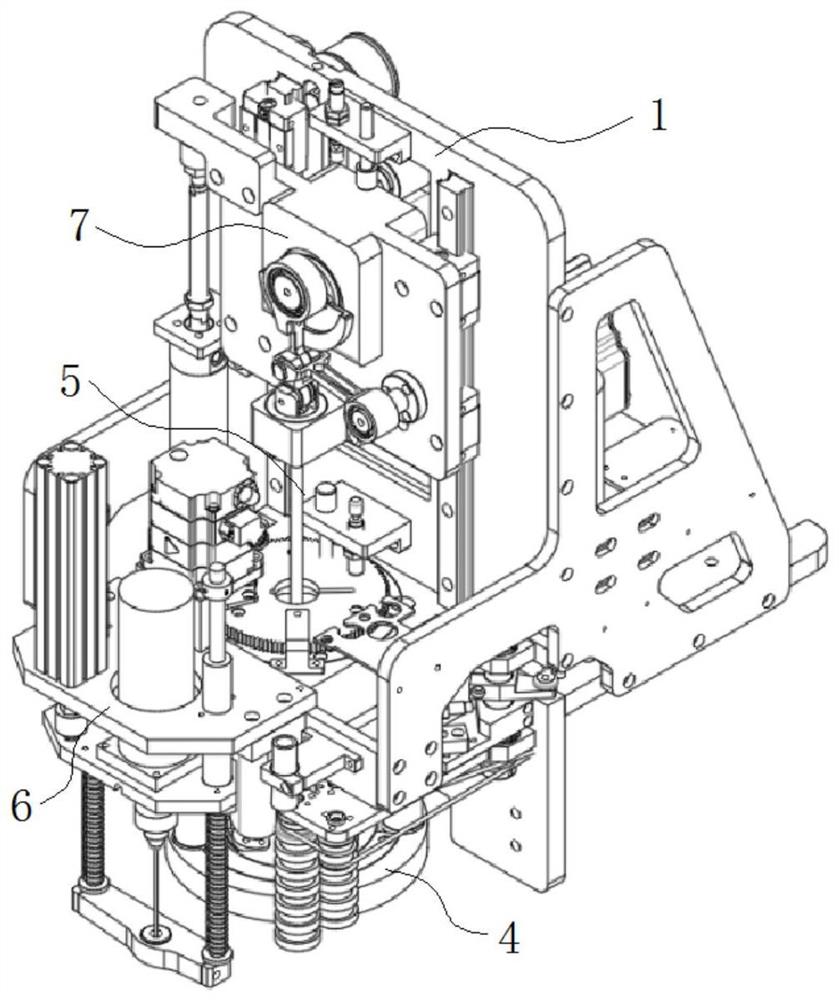
图1为本发明提供的智能裁剪机的机头结构的第一实施例的结构示意图;
图2为图1所示的刀盘组件的立体图;
图3为图1所示的偏心轮组件的剖视图;
图4为图1所示的机头主体的立体图;
图5为本发明提供的智能裁剪机的机头结构的第二实施例的结构示意图;
图6为图5所示的传动块的立体图;
图7为图5所示的推拉杆的立体图。
图中标号:1、机头主体,2、主轴电机,3、同步带,4、刀盘组件,5、裁刀,6、打孔组件,7、偏心轮组件,71、铅配重块,72、铁平衡块,8、更换组件,81、安装板,82、推拉杆,83、螺纹杆,84、传动块,85、滑动槽,86、支撑杆,87、传动轮,88、拉动簧,89、传动板,810、连接杆,811、传动块,812、定位槽。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
第一实施例
请结合参阅图1、图2、图3、图4,其中,图1为本发明提供的智能裁剪机的机头结构的第一实施例的结构示意图;图2为图1所示的刀盘组件的立体图;图3为图1所示的偏心轮组件的剖视图;图4为图1所示的机头主体的立体图。一种智能裁剪机的机头结构包括:机头主体1,所述机头主体1上固定安装有主轴电机2,所述主轴电机2的输出端设置有同步带3,所述机头主体1上设置有刀盘组件4,并且机头主体1上设置有裁刀5,所述机头主体1上设置有打孔组件6,并且机头主体1上设置有偏心轮组件7。
裁切势能减轻,提高裁剪效率,本发明是以现有的裁剪机头基础,调整了设计结构,增加了皮带周长不变原理主轴电机固定式结构、铅配重块+铁配重块组合平衡偏心轮方式,大小刀盘结构,提高裁剪机头的优越性能,同时解决裁剪机头在高速运转中的噪音大的问题。
由外接电源为主轴电机2提供电源,并且外接电源和主轴电机2之间设置有控制开关。
所述主轴电机2通过传输轮与所述同步带3连接,所述刀盘组件4位于所述机头主体1的底部,并且刀盘组件4包括大刀盘和小刀盘。
机头主体1采用现有技术,为了文档的简洁,机头主体1的具体结构不做赘述,本发明仅对改进部分进行标注。
所述打孔组件6位于所述机头主体1的一侧,所述偏心轮组件7的内部设置有铅配重块71和铁平衡块72。
本发明提供的智能裁剪机的机头结构的工作原理如下:
通过主轴电机2的输出端旋转带动同步带3旋转,同步带3旋转会带动偏心轮组件运转,通过铅配重块71和铁平衡块72组合降低偏心运转抖动问题,刀盘组件4采用大小刀盘结构,大刀盘压住裁剪材料,防止移动,小刀盘进行直线、曲线、旋转等动作的裁切。
与相关技术相比较,本发明提供的智能裁剪机的机头结构具有如下有益效果:
在设备运行时通过铅配重块71和铁平衡块72组合降低偏心运转抖动问题,降低噪音的同时给予一个稳定的上下裁切的势能,安装在偏心装置上面的裁刀5就可以实现高精度机械裁切,刀盘组件4采用大小刀盘结构,大刀盘压住裁剪材料,防止移动,小刀盘进行直线、曲线、旋转等动作的裁切,使得裁切更稳定、精度更高。
第二实施例
请参阅图5、图6和图7,基于本申请的第一实施例提供的一种智能裁剪机的机头结构,本申请的第二实施例提出另一种智能裁剪机的机头结构。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
具体的,本申请的第二实施例提供的智能裁剪机的机头结构的不同之处在于,智能裁剪机的机头结构,所述机头主体1上固定安装有所述同步带3的更换组件8,所述更换组件8包括安装板81,所述安装板81上滑动连接有推拉杆82,所述推拉杆82的内部螺纹连接有螺纹杆83,所述螺纹杆83的一端转动连接有传动块84,所述推拉杆82的内部滑动连接有滑动槽85,所述滑动槽85的内部滑动连接有支撑杆86,所述支撑杆86的一端固定安装有传动轮87,所述推拉杆82的表面套设有拉动簧88,所述推拉杆82的一端转动连接有传动板89,所述传动板89上固定安装有连接杆810,所述安装板81上固定安装有传动块811,所述传动块811上开设有定位槽812。
当传动轮87不再对同步带3进行拉动时,同步带3处于松弛状态,进而需要旋转的同步带3的长度要比正常连接的同步带3略长。
所述安装板81固定安装在所述机头主体1上,并且安装板81位于所述同步带3的一侧,所述推拉杆82的一端位于所述同步带3的一侧。
推拉杆82可以带动传动轮87移动,由传动轮87带动同步带3向右移动。
所述螺纹杆83的一端贯穿所述推拉杆82的右侧且延伸至所述推拉杆82的内部,所述传动块84位于所述滑动槽85的内部,并且传动块84与所述滑动槽85的内表面滑动连接。
当需要对同步带3的松紧度进行微调时,旋转螺纹杆83,螺纹杆83旋转会使得螺纹杆83移动,螺纹杆83移动会带动传动块84移动,传动块84移动会带动传动轮87移动,进而可以对同步带3的松紧度进行微调。
所述传动轮87位于所述同步带3的左侧,并且传动轮87与所述同步带3转动连接,所述拉动簧88位于所述安装板81和所述传动板89的中部,并且拉动簧88的两端分别与所述安装板81的表面和所述传动板89的表面固定连接。
传动板89的一侧设置有转动盘,拉动簧88的一端通过转动盘与传动板89进行连接,进而使得传动板89旋转时不会带动拉动簧88进行旋转。
所述连接杆810共设置有两个,两个所述连接杆810对称分布在传动板89的两侧,所述连接杆810与所述传动块811的表面滑动连接。
两个连接杆810是对传动板89的两端进行支撑。
所述传动块811为圆弧状,所述连接杆810位于所述传动块811的一侧,所述连接杆810的一端与所述定位槽812相适配。
连接杆810与定位槽812卡接是对连接杆810进行定位,使得连接杆810无法进行旋转,弧形的传动块811可以使得连接杆810在传动块811上旋转移动时,会沿着传动块811的弧形向左或者向右移动。
工作原理:
当需要对同步带3进行快速收紧时,旋转传动板89,传动板89旋转会带动连接杆810旋转,连接杆810旋转会使得连接杆810沿传动块811旋转,进而使得连接杆810会向右移动,连接杆810向右移动会带动传动板89向右移动,传动板89旋转向右移动会带动推拉杆82向右移动,推拉杆82向右移动会带动传动轮87向右移动,进而可以使得传动轮87带动带动同步带3向右移动,进而可以快速的对同步带3进行拉紧,并且连接杆810旋转后会拉动推拉杆88向右拉动传动板89,使得传动板89带动连接杆810进入定位槽812的内部,进而可以对转动后的连接杆810进行定位,并且当需要对同步带3进行更换时,拉动传动板89,使得传动板89带动连接杆810与定位槽812不再卡接,进而反向旋转传动板89,使得传动板89带动连接杆810旋转,进而使得传动块811不再对连接杆810进行挤压,进而使得推拉杆82在拉动簧88的拉动下向左移动,使得传动轮87不再对同步带3进行挤压,进而使得同步带3松弛,进而可以对同步带3进行更换。
有益效果:
通过拉动传动板89,使得传动板89带动连接杆810与定位槽812不再卡接,进而可以对传动板89进行旋转,传动板89旋转会带动连接杆810旋转,连接杆810旋转会使得传动块811不再对连接杆810进行挤压,进而使得由拉动簧88拉动传动板89,使得传动板89带动推拉杆82向左移动,进而使得传动轮87不再对同步带3进行拉动,使得同步带3变得松弛,进而方便对同步带3进行更换,避免了现有的同步带3十分紧,进而导致不方便对同步带3进行更换。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种智能裁剪机的机头结构
- 一种自动化智能裁剪机的真空架结构