侧围铰链视觉上下料及视觉装配集成系统
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及领域,具体涉及侧围铰链视觉上下料及视觉装配集成系统。
背景技术
工业4.0是针对人类工业革命以来的重大发展阶段来定义的。在工业革命以前,人类的生产活动主要依据工匠手工完成,虽然具备高度定制化的能力,但却无法实现高效大规模生产。随着水力、蒸汽及电力等外界能源的运用,尤其是流水线生产模式的出现,使人类掌握了复杂产品的稳定及规模生产的能力。尤其战后,基于电子控制系统的大规模应用,使人类的大规模生产能力得以进一步增强。
然而,不断提高的生产效率的同时,人类也牺牲了定制化生产的能力。每一件不同的产品,甚至不同型号的产品,都需要专门有一条生产线进行生产。生产线上的操作工、设备也都是为该产品该型号准备的。一旦更换产品或型号,即意识了生产线的重新分布和调度。传统的生产方式,越来越不适应人类对于个性化产品的不断追求。制造业急需从现有的硬性生产方式,向柔性生产方式、混线生产方式发展,在保证大规模生产能力的前提下,提供定制化生产能力。
其次,全球市场竞争的不断白热化,除少数原材料生产外,大部分终端消费类的商品都成为快消品。商品从入市到退出的生命期时间越来越短。许多电子类产品的销售周期仅为一年,甚至更短。迫使制造业不断加快产品研发和入市的迭代速度。往往一个新产品刚入市,下一代替代产品就已经开始研发。这就促使了研发过程与生产制造过程的不断融合。数字化平台技术正是为这一需求应运而生。只有研发部门与生产部门完全实现了数字化,信息与知识才能在这两个环节中形成顺畅的交流,才能最大程度地缩短产品研发到上市的时间。由此形成的从产品创意、设计、研发到生产全生命周期内的数字化融合趋势。
其三,为了最大程度地追求生产效率,制造业正在不断地追求生产过程的透明化。通过大量信息化技术与智能技术的运用,企业对于订单的处理,已经从过去有多少原料就生产多少产品的“PUSH推式生产”,正向基于有多少订单就生产多少产品的“PULL拉式生产”模式。制造业大量运用ERP、MES、EMS及CPS物联网技术等数字化技术,使得原材料、设备、能源、人员等各个要素在生产过程中均得以最优化配置,从而提高制造业的竞争力水平。
在工业4.0时代,人的作用仍然是不可替换的。工业4.0绝不是意味着无人工厂。“4.0”只是说明生产制造方式的改进,而与实现生产的具体要素无关。即使是完成一项具体生产任务的场合,用人还是用机器的选择,仍然会根据应用场合的灵活度、成本、负荷、频率、速度、品质要求等诸多要素来决定的。只是,即使是由人完成的工作,在4.0时代下也将由大量信息化辅助工具、防呆系统等帮助人完成。
随着我国智能制造的进程不断深化,我国工业领域对于机器视觉的应用也随之不断扩展。机器视觉系统作为智能制造设备的“眼睛”,能够有效推动企业设备智能化、产线智能化的发展,目前已被广泛应用于汽车、汽车零部件、3C电子、锂电池、半导体、金属加工、重工、电商物流、食品日化等下游领域。
在上述下游行业中,机器视觉主要通过三种方式实现设备智能化、产线智能化的目的,分别为:集成于生产设备中实现检测、识别、测量等功能;赋予机械臂定位、识别功能,使机械臂能够更好地完成分拣、抓取、上下料等工作;机器视觉系统直接应用于产线上,用于产品或工件的识别、检测、测量等工作。
从需求侧来看,我国对于机器视觉的需求主要有两方面的驱动力:一方面,政府大力推动企业数字化转型,加大企业对于机器视觉的需求;另一方面,社会人口结构老龄化、人口红利逐渐消失、年轻劳动力进入制造型企业的意愿低下,导致了制造型企业出现招工困难、用工成本上升的问题。
因此,发明侧围铰链视觉上下料及视觉装配集成系统来解决上述问题很有必要。
发明内容
本发明的目的是提供侧围铰链视觉上下料及视觉装配集成系统,通过视觉传感器技术,配合工业机器人及抓手组件,可打通工厂现有的上游与下游工艺的自动化与智能化升级,可实现自动化上下料,完全替代现有的人工上下料,一方面可解决工厂招工困难,用工成本上升的问题,另外一方面实现工厂真正的智能化与自动化的升级,以及提高产线的生产效率,以解决上述不足之处。
为了实现上述目的,本发明提供如下技术方案:侧围铰链视觉上下料及视觉装配集成系统,包括3D视觉上下料单元、3D视觉定位装配单元以及螺柱自动拧紧单元,所述3D视觉上下料单元包括料斗输送机组件、第一3D视觉传感器、第一装配机器人、第一抓手工装组件、翻面组件和二次中转台组件,所述翻面组件设置于二次中转台组件远离料斗输送机组件的一侧,所述第一抓手工装组件设置于第一装配机器人末端;
所述二次中转台组件包括二次定位中转工作台、第一立柱组件和2D视觉传感器,所述2D视觉传感器固定于第一立柱组件的安装支架底部,所述第一立柱组件设置于二次定位中转工作台一侧,所述第一立柱组件安装支架的底部可拆卸安装有四个呈矩形分布的光源,且所述第一3D视觉传感器可拆卸安装于第一立柱组件最顶端的横杆的底部;
所述3D视觉定位装配单元包括周转储存定位输送台、第二装配机器人、第二抓手工装组件、第二3D视觉传感器以及用于安装第二3D视觉传感器的第二立柱组件,所述第二立柱组件和翻面组件均设置于周转储存定位输送台远离第二装配机器人的一侧,所述第二抓手工装组件设置于第二装配机器人末端;
所述螺柱自动拧紧单元包括螺柱供料器组件、第三装配机器人和螺柱自动拧紧组件,所述螺柱自动拧紧组件可拆卸安装于第三装配机器人末端;
设置于3D视觉定位装配单元和螺柱自动拧紧单元外侧的安全围栏单元,所述安全围栏单元的外侧设置有电气控制集成柜;
设置于螺柱自动拧紧单元一侧的输送定位工装以及设置于输送定位工装顶部的白车身。
作为本发明的优选方案,所述第一抓手工装组件包括可拆卸安装于第一装配机器人末端的第一工装模组,所述第一工装模组的两侧均固定安装有第一分线盒,两个所述第一分线盒的一侧分别安装有无杆气缸A和无杆气缸B,所述无杆气缸A的上方设置有可拆卸安装于第一工装模组上的管线包管夹,所述无杆气缸A的移动体上安装有第一抓手连接板,所述第一抓手连接板的截面形状为U形,所述第一抓手连接板的底部安装有第一平行抓手,所述第一平行抓手的末端安装有用于夹取物料的第一手指,且所述无杆气缸B的移动体上安装有电磁铁连接板,所述电磁铁连接板的截面形状为L形,所述电磁铁连接板的底部安装有电磁铁。
作为本发明的优选方案,所述第二抓手工装组件包括可拆卸安装于第二装配机器人末端的第二工装模组,所述第二工装模组的四个侧面上均安装有无杆气缸C,四个所述无杆气缸C呈矩形分布,每个所述无杆气缸C的移动体上均设置有第二抓手连接板,所述第二抓手连接板的底部安装有第二平行抓手,所述第二平行抓手的末端安装有用于夹取物料的第二手指,且所述第二工装模组的其中两个侧面上安装有第二分线盒,两个所述第二分线盒呈对角设置。
作为本发明的优选方案,所述二次定位中转工作台包括中转台架,所述中转台架的顶部活动安装有两个中转台板,两个所述中转台板的一侧均设有用于收集未通过2D视觉识别的物料的周转箱,且所述中转台架的内部活动安装有采用倾斜方式设置的台板气缸,所述台板气缸的活塞杆与中转台板底部活动连接。
作为本发明的优选方案,所述翻面组件包括可拆卸安装于固定支架上的转台气缸,所述转台气缸的末端安装有用于翻转夹取物料的指型手爪。
作为本发明的优选方案,所述第一3D视觉传感器设置于料斗输送机组件的送料皮带机末端正上方,所述第一3D视觉传感器的视野范围可覆盖皮带送料工作区。
作为本发明的优选方案,所述第二3D视觉传感器设置于白车身侧斜上方,所述第二3D视觉传感器的视野可覆盖白车身铰链装配工作区。
作为本发明的优选方案,所述第一装配机器人、第二装配机器人和第三装配机器人均为六轴机器人。
一种侧围铰链视觉上下料及视觉装配方法,包括上述的侧围铰链视觉上下料及视觉装配集成系统,具体步骤如下
S1:人工填料,人工在输送料斗上填料;
S2:3D视觉上下料,物料输送至线体末端,第一3D视觉传感器进行拍照识别,第一装配机器人将物料抓取至周转储存定位输送台;
S3:抓取物料,第二装配机器人从周转储存定位输送台抓取物料;
S4:3D视觉定位装配,第二装配机器人末端手眼式3D传感器对白车身装配处视觉定位后,第三装配机器人末端螺柱自动拧紧组件与第二装配机器人协作进行拧紧装配作业。
所述步骤S2包括以下具体步骤
S201:系统准备;
S202:物料输送至指定末端工作区处,启动固定式3D视觉传感器,识别物料,3D视觉传感器将扫描的数据与视觉系统中的物料信息匹对后,判断物料规格,视觉系统识别物料规格后,系统给出抓取点;
S203:视觉系统引导机器人抓件,物料抓至二次定位中转工作台;
S204:2D视觉传感器拍照,精确识别工件位置及正反面;
S2041:2D视觉识别不通过,发送警报信号给SCAPE控制系统,二次定位中转工作台剔除物料至周转箱内;
S2042:2D视觉识别通过,判断正反面,如果是正面,机器人将物料抓取至周转储存定位输送台,单次循环结束,如果是反面,视觉系统引导机器人将物料精准抓取至翻面组件,翻面组件对物料进行翻面工作,机器人将物料抓取至周转储存定位输送台,单次循环结束。
在上述技术方案中,本发明提供的技术效果和优点:
1、通过3D视觉传感器技术,结合Bin-Picking无序抓取管理器软件的相应设置,配合工业机器人及抓手组件,最终实现对来料的定位抓取与精准放置;
2、通过视觉传感器技术,配合工业机器人及抓手组件,可打通工厂现有的上游与下游工艺的自动化与智能化升级;
3、通过视觉传感器技术,配合工业机器人及抓手组件,可实现自动化上下料,完全替代现有的人工上下料,一方面可解决工厂招工困难,用工成本上升的问题,另外一方面实现工厂真正的智能化与自动化的升级,以及提高产线的生产效率;
4、本发明可复制性高,针对工厂同种类不同规格物料的产线,只需对抓手组件结构做出调整,便可复制成另外生产产线的改造生产需求;
5、SPCAPE Bin-Picking系统采用外部控制APT,可以实现在实际分拣与图像采集的过程中,系统控制权在机器人与视觉系统间交替,使得系统工作流程更加智能化,系统对物料进行图像采集时,系统控制权由SPCAPE视觉系统主导控制,对物料进行识别、定位,并引导机器人进行抓取;当机器人抓取物料,系统控制权又回到机器人程序,通过机器人运动将物料转运并放置,通过系统控制权的主从交替,能够使机器人与视觉系统的功能得到最大优化。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
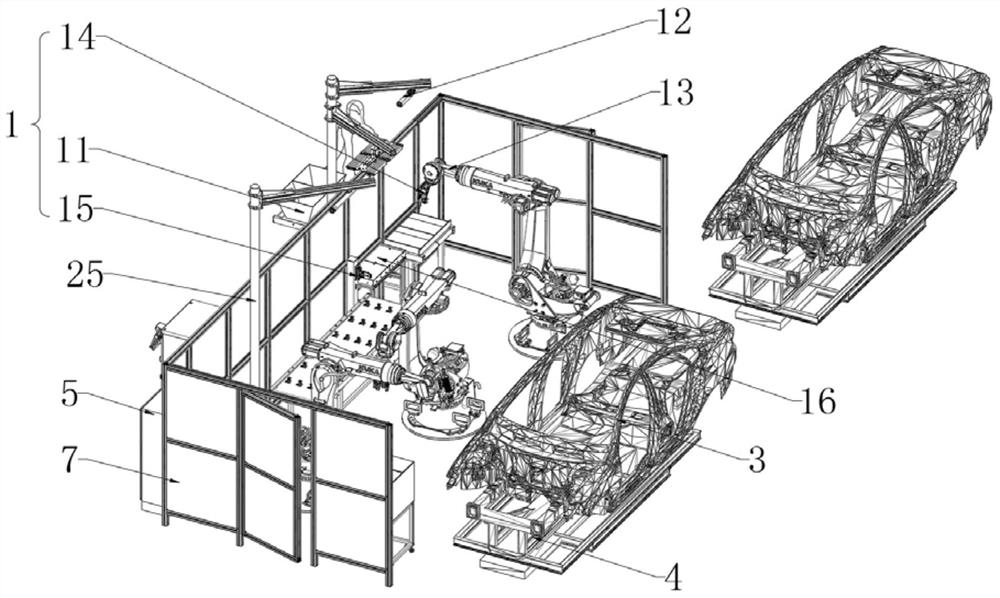
图1为本发明的侧围铰链视觉上下料及视觉装配集成系统组成立体图;
图2为本发明的侧围铰链视觉上下料及视觉装配集成系统组成立体图;
图3为本发明二次中转台组件的立体图;
图4为本发明图3中的A处放大图;
图5为本发明图3中的B处放大图;
图6为本发明翻面组件的立体图;
图7为本发明第一抓手工装组件的第一视角立体图;
图8为本发明第一抓手工装组件的第二视角立体图;
图9为本发明第二抓手工装组件的立体图;
图10为本发明第二抓手工装组件的俯视图;
图11为本发明侧围铰链视觉上下料及视觉装配集成系统的流程示意图;
图12为本发明3D视觉上下料单元的具体流程示意图。
附图标记说明:
1、3D视觉上下料单元;11、料斗输送机组件;12、第一3D视觉传感器;13、第一装配机器人;
14、第一抓手工装组件;141、第一工装模组;142、无杆气缸A;143、管线包管夹;144、第一分线盒;145、第一抓手连接板;146、第一平行抓手;1461、第一手指;147、无杆气缸B;148、电磁铁连接板;149、电磁铁;
15、翻面组件;151、转台气缸;152、指型手爪;
16、二次中转台组件;161、中转台架;162、中转台板;163、第一立柱组件;164、2D视觉传感器;165、光源;166、台板气缸;167、周转箱;
2、3D视觉定位装配单元;21、周转储存定位输送台;22、第二装配机器人;
23、第二抓手工装组件;231、第二工装模组;232、无杆气缸C;233、第二分线盒;234、第二抓手连接板;235、第二平行抓手;236、第二手指;
24、第二3D视觉传感器;25、第二立柱组件;
3、白车身;4、输送定位工装;5、电气控制集成柜;
6、螺柱自动拧紧单元;61、螺柱供料器组件;62、第三装配机器人;63、螺柱自动拧紧组件;
7、安全围栏单元。
具体实施方式
为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
本发明提供了如图1-12所示的侧围铰链视觉上下料及视觉装配集成系统,包括3D视觉上下料单元1、3D视觉定位装配单元2以及螺柱自动拧紧单元6,结构中3D视觉上下料单元1包括料斗输送机组件11、第一3D视觉传感器12、第一装配机器人13、第一抓手工装组件14、翻面组件15和二次中转台组件16,翻面组件15设置于二次中转台组件16远离料斗输送机组件11的一侧,第一抓手工装组件14设置于第一装配机器人13末端;
二次中转台组件16包括二次定位中转工作台、第一立柱组件163和2D视觉传感器164,结构中2D视觉传感器164固定于第一立柱组件163的安装支架底部,第一立柱组件163设置于二次定位中转工作台一侧,第一立柱组件163安装支架的底部可拆卸安装有四个呈矩形分布的光源165,且第一3D视觉传感器12可拆卸安装于第一立柱组件163最顶端的横杆的底部;
3D视觉定位装配单元2包括周转储存定位输送台21、第二装配机器人22、第二抓手工装组件23、第二3D视觉传感器24以及用于安装第二3D视觉传感器24的第二立柱组件25,结构中第二立柱组件25和翻面组件15均设置于周转储存定位输送台21远离第二装配机器人22的一侧,第二抓手工装组件23设置于第二装配机器人22末端;
螺柱自动拧紧单元6包括螺柱供料器组件61、第三装配机器人62和螺柱自动拧紧组件63,结构中螺柱自动拧紧组件63可拆卸安装于第三装配机器人62末端;
设置于3D视觉定位装配单元2和螺柱自动拧紧单元6外侧的安全围栏单元7,结构中安全围栏单元7的外侧设置有电气控制集成柜5;
设置于螺柱自动拧紧单元6一侧的输送定位工装4以及设置于输送定位工装4顶部的白车身3。
在上述方案中,结构中第一3D视觉传感器12设置于料斗输送机组件11的送料皮带机末端正上方,第一3D视觉传感器12的视野范围可覆盖皮带送料工作区。
在上述方案中,结构中第二3D视觉传感器24设置于白车身3侧斜上方,第二3D视觉传感器24的视野可覆盖白车身3铰链装配工作区。
在上述方案中,结构中第一装配机器人13、第二装配机器人22和第三装配机器人62均为六轴机器人。
3D视觉上下料单元1主要有1台固定式3D视觉传感器(第一3D视觉传感器12)安装于送料皮带机末端正上方,视野范围可覆盖皮带送料工作区,通过SCAPE软件对3D传感器控制,可对隔断的两个工作区轮流执行拍照识别、识别与抓取(因侧围铰链有两种规格,通过物料隔断,实现一条皮带线支持两种规格物料输送),同时固定式3D传感器的工作时间不占用机器人运行节拍,可最大程度提高整个集成线单次节拍时间。
二次中转台组件16主要由二次定位中转工作台、2D相机(2D视觉传感器)及光源组成,可以二次识别出更高精度的Bin-picking后放在二次定位中转工作台的零件的位置及姿态,该单元通常选择配合使用2D相机,处理台板(两个中转台板)分为两个区域,这个循环中的零件被放置在一个空区域中,而在上一个循环中放置并识别的另一个区域中的零件被立即抓取,这样可以实现更快的周期节拍。这样做的好处如下:
其一;通过SCAPE 3D Orientation ControlZ软件功能,可以识别定位台上工件的精确姿态,识别工件缠绕、双件等非正常情况,并引导机器人进行二次精确抓取,对于无序来料工件,该组件配合姿态纠正装置能提供比纯机械二次定位更柔性更通用的解决方法;
其二:转换更适合的抓手用于放置零件到终点;
其三:从另一个角度抓取零件使得它能正确的放置零件至终点;
其四:避免放置两个零件到终点,在Bin-picking期间通常会存在同时抓取两个零件的风险。如果有多于一个零件在桌面上软件会做检测。
螺柱自动拧紧单元6通过六轴机器人配合螺柱拧紧枪组件(即螺柱自动拧紧组件),实现全程自动化装配侧围铰链作业。
3D视觉定位装配单元2主要由1台固定式传感器(安装在白车身侧斜上方的第二3D视觉传感器24),视野可覆盖白车身铰链装配工作区,同时配合定位抓手,通过SCAPE软件控制机器人从周转储存定位输送台21一次性抓取4件铰链,且分别装配至白车身装配工位处,本发明通过3D视觉定位装配单元2与螺柱自动拧紧单元6的配合实现铰链的定位装配工艺。
具体的,人工在输送料斗上填料,物料输送至线体末端,第一3D视觉传感器12进行拍照识别,第一装配机器人13将物料抓取至周转储存定位输送台21,第二装配机器人22从周转储存定位输送台21抓取物料,第二装配机器人22末端手眼式3D传感器对白车身3装配处视觉定位后,第三装配机器人62末端螺柱自动拧紧组件63与第二装配机器人22协作进行拧紧装配作业。
需要说明的是:本发明采用SPCAPE Bin-Picking系统,包括3D视觉传感器,3D视觉传感器由于能够捕捉场景的整个3D快照而无需移动部件,结构光法具备高水平的性能和灵活性,它使用一种复杂的投影技术创建一种编码的结构化模式,将3D信息直接编码到场景中,通过用照相机和内部算法分析,该系统可在较短的采集时间内提供高水平的准确性和分辨率;
电脑需具备SCAPE无序抓取引导管理器、SCAPE零件训练管理器、SCAPE标定管理器和SCAPE通信服务器等应用程序,具体如下:
SCAPE无序抓取引导管理器:该应用程序主要在周转箱分拣过程中运行,主要特色功能如下:从传感器获取的数据和零件的CAD模型;使用哪个夹具(如果使用多个夹具),以及它将抓住的地方;关于周期时间的各种统计数据;记录可用于生成详细统计数据的所有数据;状态信息。
SCAPE零件训练管理器:该应用程序主要用于对目标零件进行离线学习,精细调整获取的3D数据,并制定抓取策略等。
SCAPE标定管理器:该应用程序主要用于对Bin-Picker单元内的所有硬件进行标定,校准传感器和夹持器,同时用于测量周转箱的位置和尺寸。
SCAPE通信服务器:SCAPE系统与机器人直接的数据交换是使用ASCII字串符。在相对二进制数据可以提供更多的位宽,以便更容易的传输如数字“1000”之类的数据时,它还使得协议更容易的用在大多数机器人上。将数据作为字符串发送的额外优势是,数据的传输更容易被用户理解。这会使系统调试更加容易。
该协议并依赖于某一特定传输介质。到目前为止,该协议层成功在使用RS232接口或以太网连接的SCAPE控制器上得到了应用。原则上,在机器人上使用该协议时,可以使用任何可在机器人与SCAPE控制器之间进行字符串传输的通信技术。SCAPE系统与机器人直接的所有通信都通过一个名为SCAPE Communication Server(简称SCS)的软件执行。该软件作为机器人与SCAPE系统之间的数据存储中介。多台机器人可以同时与SCS连接。这使得SCAPE系统可以一次控制多台机器人。
同时本发明还基于Scape运动规划控制技术,SPCAPE Bin-Picking系统采用外部控制APT,可以实现在实际分拣与图像采集的过程中,系统控制权在机器人与视觉系统间交替,使得系统工作流程更加智能化。系统对物料进行图像采集时,系统控制权由SPCAPE视觉系统主导控制,对物料进行识别、定位,并引导机器人进行抓取;当机器人抓取物料,系统控制权又回到机器人程序,通过机器人运动将物料转运并放置。通过系统控制权的主从交替,能够使机器人与视觉系统的功能得到最大优化。
参照图1-2和图7-8,结构中第一抓手工装组件14包括可拆卸安装于第一装配机器人13末端的第一工装模组141,第一工装模组141的两侧均固定安装有第一分线盒144,两个第一分线盒144的一侧分别安装有无杆气缸A142和无杆气缸B147,无杆气缸A142的上方设置有可拆卸安装于第一工装模组141上的管线包管夹143,无杆气缸A142的移动体上安装有第一抓手连接板145,第一抓手连接板145的截面形状为U形,第一抓手连接板145的底部安装有第一平行抓手146,第一平行抓手146的末端安装有用于夹取物料的第一手指1461,且无杆气缸B147的移动体上安装有电磁铁连接板148,电磁铁连接板148的截面形状为L形,电磁铁连接板148的底部安装有电磁铁149。
具体的,通过无杆气缸A142控制第一抓手连接板145带动第一平行抓手146移动,通过第一平行抓手146控制第一手指1461夹取零件,通过无杆气缸B147控制电磁铁连接板148带动电磁铁149移动,通过通电的电磁铁149吸取零件;第一抓手工装组件14为非标设计,集成两种不同规格类型的抓手模块在工装模块上,且无需做快换,快速实现零件在不同状态下或者工艺要求快速实现对零件抓取需求,最大化的提高了集成产线的周期节拍,其次该组件设计紧凑小巧,可适应复杂环境下的零件抓取需求;同时利用无杆气缸集合抓手模块,可在抓取零件前,无杆气缸进气伸出,保证在抓手抓取零件时,工装组件其他模块最大程度的不与周边存在干扰和碰撞,提高清框率(边角附件的零件,传统手抓工装容易跟周边产生碰撞而导致在抓取时采取放弃策略)和安全性。
参照图1-2和图9-10,结构中第二抓手工装组件23包括可拆卸安装于第二装配机器人22末端的第二工装模组231,第二工装模组231的四个侧面上均安装有无杆气缸C232,四个无杆气缸C232呈矩形分布,每个无杆气缸C232的移动体上均设置有第二抓手连接板234,第二抓手连接板234的截面形状也为U形,第二抓手连接板234的底部安装有第二平行抓手235,第二平行抓手235的末端安装有用于夹取物料的第二手指236,且第二工装模组231的其中两个侧面上安装有第二分线盒233,两个第二分线盒233呈对角设置。
具体的,通过无杆气缸C232控制第二抓手连接板234带动第二平行抓手235移动,通过第二平行抓手235控制第二手指236抓取零件;第二抓手工装组件23为非标设计,集成四种抓手模块(可根据项目不同的要求,只需更换对四种不同规格类型抓手模块)在工装模块上,且无需做快换,快速实现零件在不同状态下或者工艺要求快速实现对零件单个抓取需求或同时抓取4种零件,最大化的提高了集成产线的周期节拍,其次该组件设计紧凑小巧,可适应复杂环境下的零件抓取需求;同时利用无杆气缸集合抓手模块,可在抓取零件前,无杆气缸进气伸出,保证在抓手抓取零件时,工装组件其他模块最大程度的不与周边存在干扰和碰撞,提高清框率(边角附件的零件,传统手抓工装容易跟周边产生碰撞而导致在抓取时采取放弃策略)和安全性。
参照图1-5,结构中二次定位中转工作台包括中转台架161,中转台架161的顶部活动安装有两个中转台板162,两个中转台板162的一侧均设有用于收集未通过2D视觉识别的物料的周转箱167,且中转台架161的内部活动安装有采用倾斜方式设置的台板气缸166,台板气缸166的活塞杆与中转台板162底部活动连接。
具体的,二次定位中转工作台通过两个中转台板162分为两个处理区域,这个循环中的零件被放置在一个空区域中,而在上一个循环中放置并识别的另一个区域中的零件被立即抓取,这样可以实现更快的周期节拍,当某一中转台板162上存在未通过2D视觉识别的物料时,启动对应的台板气缸166,使中转台板162倾斜,将未通过2D视觉识别的物料剔除至周转箱167内。
参照图1-2和图6,结构中翻面组件15包括可拆卸安装于固定支架上的转台气缸151,转台气缸151的末端安装有用于翻转夹取物料的指型手爪152,首先,机器人将零件放置到翻转器的手指之间,并松开零件,之后零件翻面器将零件旋转180度,最后机器人再次抓取零件,此时抓取位置为另一个角度(通常为反面,相较第一次抓取零件时的方位)。翻面组件15用来将抓取的零件翻转方向,使其以正确的方向被放置进机器或治具内。机器人在二次定位中转工作台进行二次精确抓取后,如果因抓取方位原因导致无法按所需方位将零件放入工位时,将调用零件翻面系统(翻面组件15),翻面系统(翻面组件15)由一个安装有指型手爪152的转台气缸151构成,通过转台气缸151控制指型手爪152对零件进行翻面操作。
一种侧围铰链视觉上下料及视觉装配方法,包括上述的侧围铰链视觉上下料及视觉装配集成系统,具体步骤如下
S1:人工填料,人工在输送料斗上填料;
S2:3D视觉上下料,物料输送至线体末端,第一3D视觉传感器12进行拍照识别,第一装配机器人13将物料抓取至周转储存定位输送台21;
S3:抓取物料,第二装配机器人22从周转储存定位输送台21抓取物料;
S4:3D视觉定位装配,第二装配机器人22末端手眼式3D传感器对白车身3装配处视觉定位后,第三装配机器人62末端螺柱自动拧紧组件63与第二装配机器人22协作进行拧紧装配作业。
步骤S2包括以下具体步骤
S201:系统准备;
S202:物料输送至指定末端工作区处,启动固定式3D视觉传感器,识别物料,3D视觉传感器将扫描的数据与视觉系统中的物料信息匹对后,判断物料规格,视觉系统识别物料规格后,系统给出抓取点;
S203:视觉系统引导机器人抓件,物料抓至二次定位中转工作台;
S204:2D视觉传感器164拍照,精确识别工件位置及正反面;
S2041:2D视觉识别不通过,发送警报信号给SCAPE控制系统,二次定位中转工作台剔除物料至周转箱167内;
S2042:2D视觉识别通过,判断正反面,如果是正面,机器人将物料抓取至周转储存定位输送台21,单次循环结束,如果是反面,视觉系统引导机器人将物料精准抓取至翻面组件15,翻面组件15对物料进行翻面工作,机器人将物料抓取至周转储存定位输送台21,单次循环结束。
作为本发明的替代方案,如以下实施例:通过柔性震动盘供料,结合2D视觉,通过六轴机器人与机械手将2D视觉判断适合抓取的零件抓取至定位工装台;判断不适合抓取的零件重新回流到柔性震动盘供料仓内;装配六轴机器人将定位工装台的零件抓取至白车身装配工位处,配合螺柱自动拧紧结构进行装配作业。
相比本发明,上述替代方案通过柔性震动盘的震动使得堆叠的无序零件震散开,在一定的概率下使得无序零件中出现极少数量或者无适合抓取的零件,这就使得六轴机器人出现等待的情况,最终无法保证产线的节拍。
以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。