一种全自动智能飞行伞
文献发布时间:2023-07-07 06:30:04
技术领域
本发明涉及智能飞行设备领域,尤其涉及一种可编程控制的全自动智能飞行伞。
背景技术
伞是一种遮阳或遮蔽雨、雪的工具,一般用油纸、油布或塑料布等做成;雨伞的英文Umbrella来自拉丁文的Umbra,有遮阳、阴影处的意思;伞的制作材料通常包括了具延展性的布料,和其他可用作骨架的材料与缠线;使用时以手将之举起,虽然伞在最初发明时的主要目的,是用来阻挡阳光,但是现在最常被当作雨天挡雨的工具。雨伞的其它作用包括作为装饰物、拐杖甚至兵器,中国香港的老字号梁苏记雨伞就是可作兵器的雨伞之一。
现有雨伞工具多是遮阳或遮雨使用。常规伞体上包括伞柄、伞架、伞布组成,伞柄上设置供人手握的手柄,由人手撑使用。现有伞体的设计方案上,结构简单,造价低廉。但是同样也存在弊端,这种结构方案的伞体在遮雨或遮阳环境中,一般使用时间较长,相信每个人都有类似经验,长时间手撑雨伞,给胳膊和身体的体力上造成不小的消耗,同时还可能对人体机能造成损伤,形成一些劳损病症;同时,常规构造的雨伞,占据着手,在需要搬运或其他动作时,往往会造成诸多不便,如雨天或因为不便而淋湿衣服,遮阳时则遮阳效果全无。
目前市场上只能雨伞也在普及,但只是在实用上操作更省力或便捷,过程中人的双手,始终是支撑伞体的主要施力部位,没有真正可以解放双手的伞体设计方案出现,实际使用中诸多弊端,实际上并没有得到有效解决。
发明内容
本发明要解决的技术问题是提供一种全自动智能雨伞,可以实现智能开启和定位跟随功能效果,能够彻底解放双手,方便使用。
为解决上述技术问题,本发明采用的技术方案是:一种全自动智能雨伞,包括伞面、连接伞面的支撑骨架装置,支撑骨架装置内侧端连接固定在圆柱壳上,所述圆柱壳中空且上下设置封口端,所述圆柱壳内部设置控制盒,控制盒连接在圆柱壳内侧壁上,支撑骨架装置套设在圆柱壳外侧壁上,所述圆柱壳顶部设置带框架的共轴双桨电机和固定对应共轴双桨电机的支撑架、控制电机转向的两个舵机;圆柱壳内集成设置的控制盒包括飞控模块、超声波避障模块、电源模块、电显二合一模块、减速电机、电调、智能遥控器、扶手由内向外依次设置。
作为一种改进,所述控制盒上设置正反转双轴减速电机,正反转双轴减速电机固定在控制盒顶部两侧各一个,正反转双轴减速电机的电机输出轴端伸出并平行于控制盒外周面,控制盒外周面滑动连接有支撑套,支撑套内壁上设置滑槽,控制盒外周面上设置有对应滑槽的滑道,所述支撑套外周面连接支撑骨架装置的后端,所述支撑套上设置有穿接电机输出轴的穿接孔,所述穿接孔为螺纹孔,所述电机输出轴同为螺纹轴,通过正反转双轴减速电机正反转,电机输出轴带动支撑套上下沿控制盒外周面滑动,支撑套带动支撑骨架装置支开和收合伞面,完成伞面的开合操作。
作为一种改进,所述控制盒上一侧设置正反转双轴减速电机,正反转双轴减速电机固定在控制盒顶部,电机轴上设置螺纹,控制盒外周面滑动连接有支撑套,支撑套上设置有对应电机轴螺纹的穿接孔,穿接孔内设置有对应螺纹结构,支撑套设于控制盒另一对侧位置设置有光滑孔,控制盒外壳上设置穿接光滑孔的滑杆,一侧的正反转双轴减速电机牵引力作用下拉动支撑套沿另一侧的滑杆上下滑动,实现伞面的开合。
连接伞面的支撑骨架上部的支撑连杆与控制盒顶部固定,支撑骨架下部的推拉连杆套设在支撑套外侧端,正反转双轴减速电机的输出轴带动支撑套上滑时带动推拉连杆上推支撑连杆,连锁反应带动支撑骨架外侧的其他连杆,将伞面支开,反之则闭合伞面。
作为一种改进,连接伞面的支撑骨架上部的支撑连杆与控制盒顶部固定,支撑骨架下部的推拉连杆套设在支撑套外侧端,正反转双轴减速电机的输出轴带动支撑套上滑时带动推拉连杆上推支撑连杆,连锁反应带动支撑骨架外侧的其他连杆,将伞面支开,反之则闭合伞面。
作为一种改进,所述控制盒内飞控模块与超声波避障模块、舵机、电调连接,所述超声波避障模块连接在控制盒底部,所述电调连接共轴双桨电机及电池,所述飞控模块接受超声波避障模块信息,指令舵机控制共轴双浆电机的定高模块,完成智能伞飞行动作。
作为一种改进,所述圆柱壳中部设置集合线束,集合线束一端由控制盒接出,所述圆柱壳外周面上设置有插装容置槽,集合线束的另一端分散延申并连接至各功能模块的插装容置槽,所述插装容置槽内后端设置接口并和集合线束分出的功能模块连接线对应连接,所述对应功能模块设置由和插装容置槽对应的对接插口并插接在插装容置槽内。
作为一种改进,所述电源模块连接电调模块的电池,电源模块设置开关控制电池供电,所述电源模块设置充电口,所述电池与电显二合一连接。
作为一种改进,所述遥控器设置有三个按键,分别为开伞键飞控电机启停键、关伞键,所述扶手为固定在控制盒底部的月牙状或圆形握把;所述握把转动卡接在控制盒底部,所述控制盒底部设置控制槽,握把转动卡接在控制槽内。
作为一种改进,所述飞控模块内设置蓝牙模块与手机蓝牙系统配对,锁定持有手机或蓝牙装置的人,智能伞上的超声避障模块探测到使用人的高度参数,对应信息反馈到飞控模块,飞控模块内的自动控制系统做出反应,调整伞体姿势,实现即时控制。
伞面装置也可以是包括折叠板伞面和连接打开折叠板的支撑骨架装置,所述折叠板伞面可控制打开角度135度和水平角度180度两个调节档;所述折叠板伞面的板材可选择塑材、金属或碳纤维等硬质板材。
该发明创造的有益效果在于:有效实现伞体的自由控制,且解放人的双手,实现智能跟随飞行,且后期再开发潜力巨大,如可增设摄像功能等,辅助性功能可以根据需求实时增加调整,操作便捷高效实用。
附图说明
图1为本发明一种实施例的结构示意图;
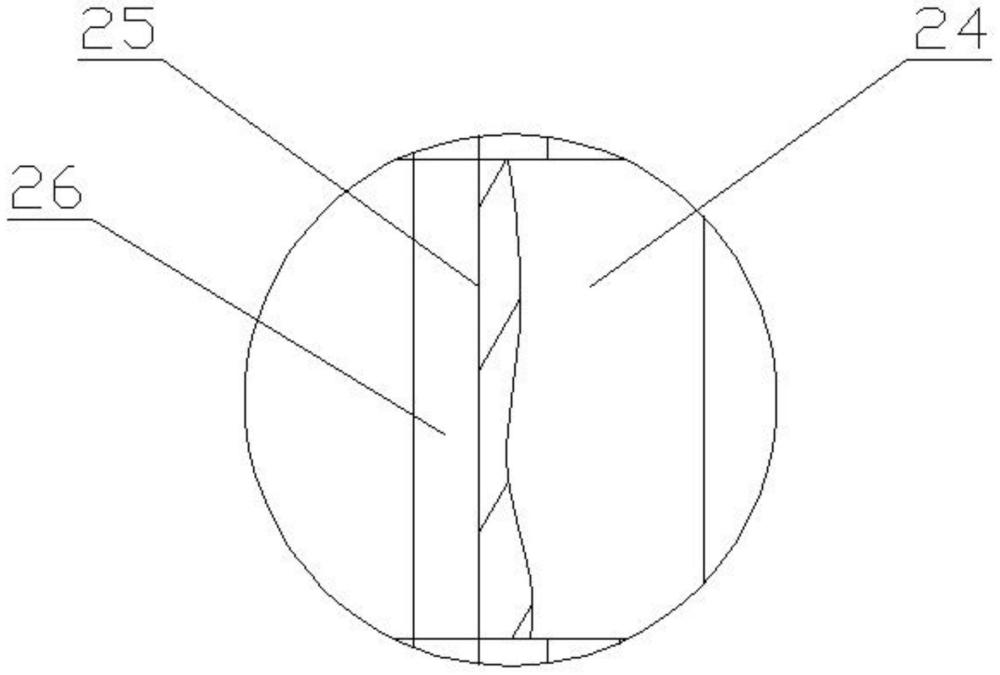
图2为图1中Ⅰ的放大图;
图3为图1中Ⅱ的放大图。
具体实施方式
结合附图,做对应说明:如图1-3所示,
该实施例中,包括伞面1、连接伞面的支撑骨架装置2,支撑骨架装置内侧端连接固定在圆柱壳4上,所述圆柱壳中空且上下设置封口端,所述圆柱壳内部设置控制盒3,控制盒连接在圆柱壳内侧壁上,支撑骨架装置套设在圆柱壳外侧壁上,所述圆柱壳顶部设置带框架11 的共轴双桨电机12和固定对应共轴双桨电机的支撑架5、控制电机转向的两个舵机6;圆柱壳内集成设置的控制盒包括飞控模块13、超声波避障模块14、电源模块15、电显二合一模块16、减速电机17、电调8、智能遥控器9、扶手10由内向外依次设置。
该实施例中,所述控制盒上设置正反转双轴减速电机7,正反转双轴减速电机固定在控制盒顶部两侧各一个,正反转双轴减速电机的电机输出轴端伸出并平行于控制盒外周面,控制盒外周面滑动连接有支撑套24,支撑套内壁上设置滑槽25,控制盒外周面上设置有对应滑槽的滑道26,所述支撑套外周面连接支撑骨架装置的后端,所述支撑套上设置有穿接电机输出轴的穿接孔18,所述穿接孔为螺纹孔,所述电机输出轴同为螺纹轴,通过正反转双轴减速电机正反转,电机输出轴带动支撑套上下沿控制盒外周面滑动,支撑套带动支撑骨架装置支开和收合伞面,完成伞面的开合操作。
该实施例中,连接伞面的支撑骨架上部的支撑连杆19与控制盒顶部固定,支撑骨架下部的推拉连杆20套设在支撑套外侧端,正反转双轴减速电机的输出轴带动支撑套上滑时带动推拉连杆上推支撑连杆,连锁反应带动支撑骨架外侧的其他连杆,将伞面支开,反之则闭合伞面。
该实施例中,连接伞面的支撑骨架上部的支撑连杆19与控制盒顶部固定,支撑骨架下部的推拉连杆20套设在支撑套外侧端,正反转双轴减速电机的输出轴带动支撑套上滑时带动推拉连杆上推支撑连杆,连锁反应带动支撑骨架外侧的其他连杆,将伞面支开,反之则闭合伞面。
该实施例中,所述控制盒内飞控模块与超声波避障模块、舵机、电调连接,所述超声波避障模块连接在控制盒底部,所述电调连接共轴双桨电机及电池,所述飞控模块接受超声波避障模块信息,指令舵机控制共轴双浆电机的定高模块21,完成智能伞飞行动作。
该实施例中,所述圆柱壳中部设置集合线束,集合线束一端由控制盒接出,所述圆柱壳外周面上设置有插装容置槽,集合线束的另一端分散延申并连接至各功能模块的插装容置槽,所述插装容置槽内后端设置接口并和集合线束分出的功能模块连接线对应连接,所述对应功能模块设置由和插装容置槽对应的对接插口并插接在插装容置槽内。
该实施例中,所述电源模块连接电调模块的电池,电源模块设置开关控制电池供电,所述电源模块设置充电口,所述电池与电显二合一连接。
该实施例中,所述遥控器设置有三个按键,分别为开伞键飞控电机启停键、关伞键,所述扶手为固定在控制盒底部的月牙状或圆形握把;所述握把转动卡接在控制盒底部,所述控制盒底部设置控制槽 22,握把转动卡接在控制槽内。
该实施例中,所述飞控模块内设置蓝牙模块23与手机蓝牙系统配对,锁定持有手机或蓝牙装置的人,智能伞上的超声避障模块探测到使用人的高度参数,对应信息反馈到飞控模块,飞控模块内的自动控制系统做出反应,调整伞体姿势,实现即时控制。
除上述实施例外,正反转双轴减速电机还可以设置单侧的一个,所述控制盒上一侧设置正反转双轴减速电机7,正反转双轴减速电机固定在控制盒顶部,电机轴上设置螺纹,控制盒外周面滑动连接有支撑套24,支撑套上设置有对应电机轴螺纹的穿接孔,穿接孔内设置有对应螺纹结构,支撑套设于控制盒另一对侧位置设置有光滑孔,控制盒外壳上设置穿接光滑孔的滑杆,一侧的正反转双轴减速电机牵引力作用下拉动支撑套沿另一侧的滑杆上下滑动,实现伞面的开合。
本发明包括并不局限以下实施方式:
本发明利用减速电机装置控制智能伞开合,减速电机连接控制板,控制板连接电源模块,操作减速电机正反转,实现智能伞开合。控制盒是直径(50-80)厘米,高(100-180)厘米的圆柱体,顶部周边5-8个固定支撑骨架的凹槽,凹槽中部设钢丝通道,固定支撑骨架;控制盒外面套一外壳,可上下活动,外壳下面设5-8个凹槽,用钢丝经通道固定支撑骨架内侧一根,减速电机轴插入外壳体螺丝孔中,随着电机轴转动外壳上升支撑骨架撑开,智能伞开启。介绍三种减速电机开合伞装置;
智能开合装置一:控制盒外侧对称部位,垂直固定正反转减速电机,电机轴带螺纹,电机轴中部穿过外壳上螺丝孔,固定在控制盒底部螺孔。操作减速电机正转,外壳两侧随电机轴转动上升,支撑骨架撑开伞面,智能伞打开;操作减速电机反转,外壳下降支撑骨架收起,智能伞合上。
智能开合装置方案二,正反转双轴减速电机固定在控制盒内顶部。两边电机轴伸出控制盒,电机轴上固定同步轮,控制盒下部固定另一组同步轮,支撑伞骨的外壳上垂直对应两边设正反向齿牙。操作电机正转,同步带拉动外壳齿牙移动上升,完成开伞;操作电机反转,同步带拉动外壳移动下降,完成和伞
本发明采用共轴双桨电机用于抵消扭力,同时利用舵机控制飞行高度,方向。共轴双桨电机上部电机装正转螺旋桨,用固定盖拧紧,底部电机轴长出固定盖,装反转螺旋桨用螺帽锁死。固定架安装在共轴双桨电机连接处,两电机线连接两电调,两电调连接电源模块和共轴双桨电机飞控,控制盒上两根支架与共轴双桨电机固定架外侧活动链接;电机两侧固定两舵机,两舵机连杆分别连接正反转电机固定架,两舵机线连接共轴双桨飞控;共轴双桨飞控控制共轴双桨电机螺旋桨正反转,舵机连杆带动共轴双桨电机固定架上下活动,控制智能伞飞行高度,方向。
本发明采用共轴双桨电机抵消扭力,同时通过改变上下电机功率和正反转螺旋桨转速控制飞行高度,方向。共轴双桨电机底座固定在控制盒顶部中间位置,上部电机装正转螺旋桨,用固定盖拧紧,底部电机轴长出固定盖,装反转螺旋桨,用螺帽锁死。共轴双桨电机连接两电调,两电调分别连接共轴双桨飞控。飞控主板负责计算当前飞行姿态,控制电调。飞控主板用姿态解算空间轴欧拉角,陀螺仪采用角速度值,加速度传感器采样轴加速度值,而磁力传感器采样得出地磁场值。将陀螺仪,加速度传感器,磁力传感器采样的数据进行标定,漏波,校正后得出轴欧拉角度采用IIC总线与飞控主板通信。计算出要改变电机功率和正反转螺旋桨的数值,实现改变飞行高度和飞行方向。
控制盒内包括;飞控模块;电池;电源模块;超声波避障模块;电显二合一;减速电机;减速电机控制板;述飞控模块连接两舵机;所述飞控模块连接超声波避障模块;所述飞控模块连接两电调;所述两电调连接电源模块;所述电源模块连接电池;所述电池连接电显二合一;所述电源模块连接减速电机控制板;所述减速电机控制板连接两减速电机;除上述优选实施例外,本发明还有其他的实施方式,本领域技术人员可以根据本发明做出各种改变和变形,只要不脱离本发明的精神,均应属于本发明的保护范围。