一种电动六连杆式骨外固定器
文献发布时间:2023-06-19 10:30:40
技术领域
本发明属于骨外固定器技术领域,特别涉及一种电动六连杆式骨外固定器。
背景技术
当前在临床治疗中所使用的骨外固定器普遍为手动调整的机械工具,不具备数字化控制、测量等功能,对此也有很多骨外固定器的数字控制化改进,例如公告号CN206641900U的实用新型专利,其基础为泰勒支架,所以也包括泰勒支架支撑杆长度行程有限,经常需要通过更换支撑杆来调节的缺点,同时电源位于支撑杆内部,增加制作成本。还有公布号为CN106264690A的发明专利中,同样将泰勒支架作为基础,继承了泰勒支架的缺点,且在对支撑杆进行调整时需要逐个安装驱动电机,大大增加操作繁琐度。
当前由俄罗斯发明的Ortho-SUV骨外固定架可以有效增加支撑杆伸缩行程,解决了泰勒支架需要经常更换支撑杆的问题,但此固定架仅仅只能手动调整,甚至支撑杆长度也要依靠医生通过外界工具测量,故具有一定误差。
综合来说,现有技术所面对的问题是,骨外固定器的支撑杆长度变化区间小导致需要频繁置换支撑杆,以及支撑杆手动调整与测量会导致人为误差,影响骨外固定手术治疗效果,同时增加操作难度导致操作门槛高,耗费人力资源。
发明内容
本发明的目的在于提供一种电动六连杆式骨外固定器,具有联动的六连杆结构,空间运动范围广,可实现数字化调节。
为达成上述目的,本发明的解决方案为:一种电动六连杆式骨外固定器,包括近端环、远端环、电动支撑杆、万向节和普通夹片,所述近端环和远端环上各自均布固定有三个所述普通夹片,所述近端环上三个普通夹片的位置均与所述远端环上三个普通夹片的位置错开,所述普通夹片为平直的、被夹持固定的连接片,每个所述普通夹片的外端均伸出近端环和远端环,且每个所述普通夹片的外端上均连接一个所述万向节,每个所述万向节均连接一根所述电动支撑杆,使所述电动支撑杆置于近端环和远端环之外;
每根所述电动支撑杆均包括
螺杆;
电机外壳,设置在所述螺杆的端部,电机外壳与所述万向节固定连接;
微型减速电机,置于所述电机外壳的内部,微型减速电机的电机轴与所述螺杆的端部固定连接;
小型显示屏;
螺母套筒,与小型显示屏固定在一起并套置在所述螺杆的杆身上,所述螺杆的杆身设有外螺纹,所述螺母套筒内有与外螺纹配合的内螺纹,使得所述螺母套筒连同小型显示屏滑动连接于所述螺杆上,一所述电动支撑杆的螺母套筒铰接在相邻一电动支撑杆的电机外壳外侧,从而六根电动支撑杆通过首尾连接闭合构成电动六连杆结构伸缩支撑架;
位移传感器,安装于螺母套筒内部,位移传感器通过螺母套筒外侧的小型数字显示屏显示电动支撑杆的当前长度;
自锁开关,穿置在所述螺母套筒外侧,可用于手动旋转,使自锁开关穿入螺母套筒并顶住螺杆的外螺纹,从而使螺母套筒定位;
该骨外固定器还包括运动控制器和用户终端,所述用户终端与运动控制器相连,所述运动控制器通过驱动线连接于任意一根电动支撑杆的微型减速电机,所述用户终端用于输入电子处方。
进一步,所述近端环上的其中一个普通夹片可替换为一个Z型夹片,所述Z型夹片为横截面呈Z型的、被夹持固定的连接片,所述Z型夹片相对所述普通夹片具有高度差。
进一步,所述自锁开关为块体,自锁开关的端面设有凸杆,凸杆带有外螺纹,所述螺母套筒的外侧开设与所述螺杆相通的内螺纹孔,供凸杆穿置配合。
进一步,所述凸杆末端装有胶垫。
进一步,所述电机外壳开设电机驱动插口,所述驱动线插接在电机驱动插口中实现与所述微型减速电机的连接。
采用上述方案后,相较于现有技术,本发明的有益效果在于:
本发明为治疗骨折、严重的肢体损伤和残缺及重建患肢功能的骨外固定技术中使用的骨外固定器,通过电动六连杆结构伸缩支撑架组成的六轴调节平台,螺母套筒在螺杆上形成升降运动,螺母套筒处设有传感器,通过运动控制器可以实时读取杆长度信息并实时调节支撑杆长度从而控制平台角度;
电动六连杆结构伸缩支撑架是由六根结构相同的电动支撑杆通过首尾相连的方式将每两根相邻的电动支撑杆的电机外壳一侧与螺母套筒一侧以360°活动关节相连接,形成首尾相连的闭合环,电动六连杆结构伸缩支撑架置于近端环和远端环之外,因此摆脱了近端环和远端环的限制,其螺杆可以伸出近端环和远端环之外,因此螺杆的长度是任意设计的,进而螺母套筒的行程得到延长,从而骨外固定器整体的运动范围得到大大的提升,克服了传统泰勒固定架支撑杆长度行程果断导致临床中需要频繁换杆的问题,通过控制器控制微型减速电机实现数字化调节骨外固定器,大幅降低操作难度,位于螺母套筒出的位移传感器可以实时反馈支撑杆长度信息,从而代替人为借助外接工具测量支撑杆长度,减少误差,保证治疗效果,位于螺母套筒处的自锁开关可以有效防止病人佩戴之后长期晃动产生的偏移。
附图说明
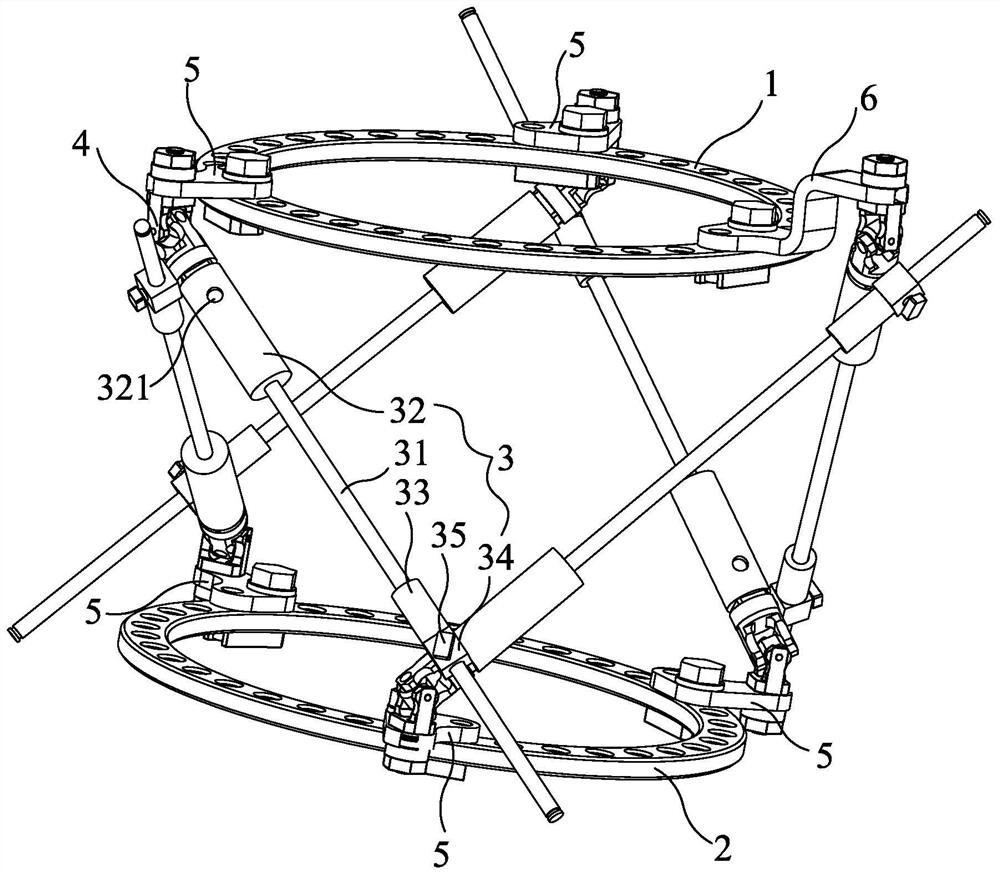
图1是本发明一实施例整体结构示意图;
图2是本发明一实施例单根电动支撑杆的结构示意图;
图3是本发明一实施例相邻两根电动支撑杆连接示意图;
图4为本发明一实施例电螺母套筒的结构示意图;
图5为本发明一实施例电自锁开关的结构示意图;
图6为本发明一实施例电该发明运动控制原理图。
标号说明:
近端环1、远端环2、电动支撑杆3、螺杆31、电机外壳32、电机驱动插口321、小型显示屏33、螺母套筒34、自锁开关35、凸杆351、万向节4、普通夹片5、Z型夹片6。
具体实施方式
本发明提供一种电动六连杆式骨外固定器,以下为了说明的方便,结合附图及具体实施例对本发明做详细的说明。
一实施例:
一种电动六连杆式骨外固定器,请重点参阅图1,包括近端环1、远端环2、电动支撑杆3、万向节4、普通夹片5和Z型夹片6,所述近端环1和远端环2上各自均布固定有三个所述普通夹片5,所述近端环1上三个普通夹片5的位置均与所述远端环2上三个普通夹片5的位置错开,在一实施例中,所述近端环1上的其中一个普通夹片5可替换为一个Z型夹片6,即所述近端环1上均布固定有两个所述普通夹片5和一个Z型夹片6,所述远端环2上均布固定有三个所述普通夹片5,所述近端环1上两个所述普通夹片5和一个Z型夹片6的位置均与所述远端环2上三个普通夹片5的位置错开,所述普通夹片5为平直的、被夹持固定的连接片,所述Z型夹片6为横截面呈Z型的、被夹持固定的连接片,所述Z型夹片6相对所述普通夹片5具有高度差,该高度差可以在骨外固定器使用时提供额外的调整空间,同时,Z型夹片6可以起到标识作用,因为六连杆结构伸缩支撑架的整体较为对称、一致,所以使用时不方便辨认需要操作的电动支撑杆3的位置,因此设置Z型夹片6便于用户通过Z型夹片6去分辨电动支撑杆3的方位。每个所述普通夹片5和Z型夹片6的外端均伸出近端环1和远端环2,且每个所述普通夹片5和Z型夹片6的外端上均连接一个所述万向节4,每个所述万向节4均连接一根所述电动支撑杆3,使所述电动支撑杆3置于近端环1和远端环2之外;
电动支撑杆3的数量的数量为六根,每根电动支撑杆3的结构完全相同,结合图2,每根所述电动支撑杆3均包括
螺杆31,作为主要支架;
电机外壳32,设置在所述螺杆31的端部,电机外壳32与所述万向节4固定连接;
微型减速电机(图中未示出),置于所述电机外壳32的内部,微型减速电机的电机轴与所述螺杆31的端部固定连接;具体地,微型减速电机输出轴为多角扳手,螺杆31的端部开设多角槽孔与多角扳手配合连接;
小型显示屏33;
螺母套筒34,与小型显示屏33固定在一起并套置在所述螺杆31的杆身上,所述螺杆31的杆身设有外螺纹,所述螺母套筒34内有与外螺纹配合的内螺纹,使得所述螺母套筒34连同小型显示屏33滑动连接于所述螺杆31上,一所述电动支撑杆3的螺母套筒34铰接在相邻一电动支撑杆3的电机外壳32外侧,此处铰接具体为360°平面旋转关节连接,如图3所示;
从而六根电动支撑杆3通过首尾连接闭合构成电动六连杆结构伸缩支撑架,电动六连杆结构伸缩支撑架置于近端环1和远端环2之外,其螺杆31可以伸出近端环1和远端环2之外,因此螺杆31的长度是任意设计的,进而螺母套筒34的行程得到延长,从而骨外固定器整体的运动范围得到大大的提升;
位移传感器(图中未示出),安装于螺母套筒34内部,位移传感器通过螺母套筒34外侧的小型数字显示屏显示电动支撑杆3的当前长度;
结合4和图5所示,自锁开关35,穿置在所述螺母套筒34外侧,可用于手动旋转,使自锁开关35穿入螺母套筒34并顶住螺杆31的外螺纹,从而使螺母套筒34定位;
该骨外固定器还包括运动控制器(图中未示出)和用户终端(图中未示出),所述用户终端为运动控制器配套触摸显示屏或计算机、手机等,所述用户终端与运动控制器相连,所述电机外壳32开设电机驱动插口321,所述运动控制器通过驱动线插接在电机驱动插口321中实现与任意一根电动支撑杆3的微型减速电机的连接,用以接收反馈信号并驱动微型减速电机,所述用户终端用于输入电子处方,用户可通过控制运动控制器来控制微型减速电机实现数字化调节该骨外固定器。每一根电动支撑杆3都有对应于处方软件的独立编号,电源与信号均由外部运动控制器提供。
在一实施例中,所述自锁开关35为块体,自锁开关35的端面设有凸杆351,凸杆351带有外螺纹,所述螺母套筒34的外侧开设与所述螺杆31相通的内螺纹孔,供凸杆351穿置配合,所述凸杆351末端装有胶垫,用以增加与螺杆31的摩擦力。
本发明的使用方法为:
步骤1:医生参考对患者拍摄的X光片,先将该骨外固定器各个电动支撑杆3的长度通过手动进行初步调整,并将电动六连杆式骨外固定器套在患者身上,再通过钢针与钢针固定座等辅助工具将近端环1、远端环2和患者肢体固定。
步骤2:将所有电动支撑杆3的自锁开关35旋转至松弛位置。
步骤3:结合图6所示,通过处方软件计算获取各个编号的电动支撑杆3长度信息,医生根据处方信息,首先将驱动线插入相应的一根电动支撑杆3的电机驱动插口321,用户终端输入处方信息通过运动控制器启动程序,程序启动后,微型减速电机开启旋转,带动螺杆31转动,螺杆31杆身上的螺母套筒34沿螺杆31进行移动,螺母套筒34内部的位移传感器可以将长度信息及时显示在螺母套筒34外侧的小型屏幕上,所述长度信息是指万向节4预设为起始端、从万向节4至螺母套筒34的长度值,当螺母套筒34移动至电子处方所需的长度位置时,微型减速电机停止旋转。
步骤4:调整完一根电动支撑杆3后,拔下电机驱动线,并插入下一根电动支撑杆3的电机驱动插口321,直至六根电动支撑杆3均调整完毕。
步骤5:将所有电动支撑杆3的自锁开关35旋紧,凸杆351末端的胶垫顶住螺杆31的外螺纹,使螺母套筒34固定在当前长度位置上,完成骨外固定器的固定。
上述控制程序可通过扩展功能以实现更多操作方法。
以上所述仅为本发明的较佳实施例,并非对本案设计的限制,凡依本案的设计关键所做的等同变化,均落入本案的保护范围。