获取人类卵子的针
文献发布时间:2023-06-19 11:02:01
相关申请
本申请要求于2018年5月29日提交的美国临时专利申请第62/677,293号的优先权,其全部内容通过引用合并于此。
技术领域
本技术涉及与体外授精(IVF:in vitro fertilisation)和辅助生殖治疗(ART:assisted reproductive therapy)有关的用于卵子的采集或提取的针和针组件。
背景技术
IVF涉及在体外(即,在子宫外)对雌性卵母细胞(卵巢中可能经历减数分裂形成卵子的细胞)或卵子的授精。
基本的IVF针经过多年改进几乎没有变化。通常,一般使用具有330mm,cm 16/17规针杆和19/20规针尖的针。
在其他领域,存在使用针来去除样品和/或施加助剂的针组件,但是这些针组件通常不适合于卵子的获取。
IVF针沿着阴道探针被引入阴道,该阴道探针具有针头导向器以保持针头的方向。在近端,该针连接到挠性管,并抽吸人类卵子以将人类卵子收集到试管中。
当前的卵子去除过程需要多次插入阴道壁以取出多个卵子,这可能是痛苦的并且还可能导致出血。
理想地,具有能够在门诊环境中使用的针组件将降低患者的费用。更安全、更省力的卵子收集将通过允许在诊所而不是医院收集卵子来降低IVF成本,并且有可能显著增加IVF周期并提高出生率。
US 6,592,559公开了包括针的针组件,该针组件包括由诸如镍钛合金等超弹性材料制成的针套管。将针套管冷加工或加热退火以产生预成形的弯曲部,该弯曲部能够在同轴外部套管的通道内变直以引入患者体内。当从外部套管展开时,针套管基本上返回到预制构造,以在针组件的进入路径的横向区域引入或取出材料。针组件能够包括多个针套管,该针套管能够可变地布置或被构造成用于获得期望的输注模式。
然而,由于多种原因,针组件尤其将不再适合于卵子获取。由于外套管不包括倾斜的尖端,因此需要将外套管和导引套管针一起工作以插入体内。随后取下套管针,然后将输液针插入其位置。
本发明人已经开发了用于获取人类卵子的改进的针组件。
发明内容
在第一方面,本发明提供了用于获取人类卵子的针组件,该针组件包括:
外套管,其具有近端和远端;
空心内针,其可滑动地设置在中空的外套管内,所述空心内针具有:
远端区域,其被构造用于限定弯曲部;
远端,其具有尖锐的斜面;
缩回位置,其中,远端区域设置在外套管内;以及
伸出位置,其中,空心内针的远端位于外套管的远端的远侧,并且远端区域至少部分地在外套管的外部;以及
控制器,其被构造为使空心内针在缩回位置和伸出位置之间移动,其中;
当空心内针处于缩回位置时,远端区域与外套管相符;并且
当空心内针处于伸出位置时,远端区域限定弯曲部。
在实施例中,外套管的远端具有尖锐的斜面。
在实施例中,当空心内针处于缩回位置时,外套管的尖锐斜面和空心内针的尖锐斜面基本上对准并形成斜面。
在实施例中,当空心内针处于缩回位置时,空心内针的远端从外套管的远端突出。
在实施例中,由远端区域限定的弯曲部是单向弯曲部。
在实施例中,远端区域被构造成相对于外套管延伸到大约90°的最大角度。
在实施例中:
通过使空心内针相对于外套管向远侧前进,空心内针从缩回位置移动到伸出位置;并且
通过使空心内针相对于外套管向近侧缩回,空心内针从伸出位置移动到缩回位置。
在实施例中,当使空心内针相对于外套管向远侧前进40mm时,弯曲部的半径约为25mm。
在实施例中,空心内针的远端区域由弹性合金形成。
在实施例中,空心内针由弹性合金形成。
在实施例中,弹性合金是镍钛合金。
在实施例中,空心内针的远端区域由热塑性聚合物形成。
在实施例中,空心内针的远端区域由螺旋弹簧形成。
在实施例中,螺旋弹簧被弹性材料覆盖。
在实施例中,空心内针的远端区域由弹性体形成。
在实施例中,弹性体是聚乙烯或尼龙。
在实施例中,空心内针的远端区域由智能聚合物形成。
在实施例中,外套管是针。
在实施例中,外套管是16g或17g针。
在实施例中,空心内针是19g针。
在实施例中,空心内针的长度约为350mm。
在实施例中,空心内针的远端区域能够承受刺穿卵泡以抽出多个卵子所必需的挠曲力。
在实施例中,挠曲力约为20,000mN。
在实施例中,空心内针和外套管是无芯的。
在实施例中,空心内针的远端和/或外套管的远端是三面的。
在实施例中,在外套管的远端附近或远端处的区域是不透射线的。
在实施例中,在空心内针的远端附近或远端处的区域是不透射线的。
在实施例中,在外套管的远端附近或远端处的区域是不透射线的,并且在空心内针的远端附近或远端处的区域是不透射线的。
在实施例中,不透射线区域的长度约为10mm。
空心内针和/或外套管的远端的不透射线区域允许通过超声或X射线来识别针组件在受试者中的位置。
在实施例中,当空心内针处于伸出位置时,空心内针在外套管内被限制旋转。
在实施例中,当空心内针处于缩回位置或处于伸出位置时,空心内针在外套管内被限制旋转。
在实施例中,控制器被构造成将空心内针可释放地保持在缩回位置或伸出位置。
在实施例中,控制器包括:
连接至外套管的第一部分;和
连接至空心内针的第二部分,
其中,相对于第一部分移动第二部分使空心内针在缩回位置和伸出位置之间移动。
在实施例中:
第一部分具有第一狭槽和第二狭槽;并且
第二部分具有凸缘,所述凸缘被构造成容纳在第一狭槽或第二狭槽中,
其中,通过将凸缘设置在第一狭槽中,将空心内针保持在缩回位置,并且通过将凸缘设置在第二狭槽中,将空心内针保持在伸出位置。
在实施例中,凸缘和弯曲部沿同一方向延伸。
在实施例中,管道系统连接至空心内针。
在实施例中,空心内针的近端连接至管道系统。
在实施例中,空心内针被构造成与真空源以流体连通的方式连接,所述真空源被构造成在空心内针中产生负压以获取人类卵子。
在实施例中,空心内针与容器流体连通,所述容器用于获取通过空心内针提取的人类卵细胞。
在实施例中,针组件还包括旋塞阀,所述旋塞阀与空心内针、容器和真空源流体连通,该旋塞阀可在第一构造和第二构造之间移动:
在所述第一构造中,空心内针与容器和真空源流体连通,以获取和收集人类卵子;
在所述第二构造中,空心内针与用于冲洗空心内针的冲洗流体流体连通。
还公开了一种卵子获取系统,其包括:
根据本发明的第一方面的针组件;
与空心内针流体连通的管道系统;
与管道系统流体连通的负压泵,所述负压泵用于通过针组件取出卵子;以及
与管道系统流体连通的容器,所述容器用于容纳所获取的卵子。
在第二方面,本发明提供了一种用于获取人类卵子的方法,该方法包括:
在空心内针处于缩回位置的情况下,将根据本发明的第一方面的针组件的外套管的远端插入通过受试者的阴道壁并进入卵巢;
将外套管的远端定位在卵泡附近;以及
通过空心内针从卵泡中获取卵子。
在实施例中,该方法还包括:
将空心内针移至伸出位置;以及
将空心内针的远端定位在卵泡附近以获取卵子。
在实施例中,该方法还包括:
将空心内针移至缩回位置;
旋转针组件以将外套管重新放置在卵巢中;
将空心内针移至伸出位置;和
将空心内针的远端定位在卵泡附近以获取卵子。
还公开了一种获取人类卵子的方法,该方法包括:
将根据本发明的第一方面的针组件的外套管的远端通过阴道壁引入卵巢;
将空心内针移至伸出位置;以及
通过空心内针获取一个或多个卵子。
在实施例中,从针组件的外套管的远端的单个入口获取多个卵子。
在整个说明书中,除非上下文另外要求,否则词语“包括”或诸如“包括”的变体都将被理解为隐含包括所陈述的元素、整数或步骤、或元素、整数或步骤组,但是不排除任何其他元素、整数或步骤、或元素、整数或步骤组。
本说明书中已经包括的对文件、行为、材料、装置或物品等的任何讨论仅是为了提供本发明的来龙去脉的目的。不认为由于在本说明书的每个权利要求的优先权日之前上述事项已经存在而承认这些事项中的任何一项或所有这些事项构成现有技术基础的一部分或者是与本发明有关的领域中的公知常识。
附图说明
现在,将参考附图仅通过示例的方式说明本发明的优选实施例,其中:
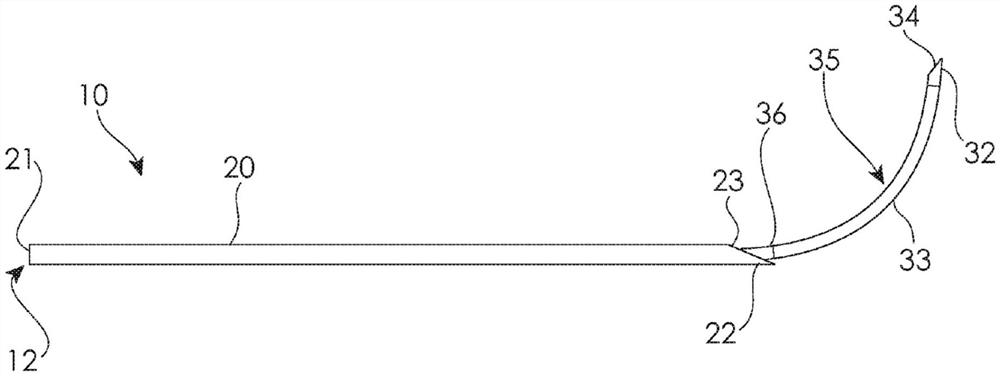
图1是根据本发明的实施例的针组件的侧视图;
图2是图1的针组件的俯视图;
图3是图1的针组件的远端的透视图;
图4是图1的针组件的透视图;
图5是图1的针组件的截面侧视图;
图6是图1的针组件的远端的截面侧视图;
图7是图1的针组件的远端的截面侧视图,其中空心内针略微伸出;
图8是图1的针组件的透视图,其中空心内针略微伸出;
图9是图1的针组件的透视图,其中空心内针略微伸出;
图10是图1的针组件的截面侧视图,其中空心内针略微伸出;
图11是图1的针组件的侧视图,其中空心内针略微伸出;
图12至图14示出了将图1的针组件的空心内针相对于外套管延伸至其完全伸出位置(图14)的顺序步骤;
图15是图1的针组件的俯视图,其中,空心内针已完全伸出,并且说明了由空心内针的远端区域限定的弯曲部的单向度性;
图16是图1的针组件的透视图,其中空心内针完全伸出;
图17是图1的针组件的远端的截面侧视图,其中空心内针完全伸出;
图18示出了图1的针组件,其中空心内针完全伸出;
图19是根据另一实施例的图1的针组件的空心内针的远端区域的透视图;
图20是与图1的针组件一起使用的控制器的透视图;
图21示出了图20的控制器,其将图1的针组件的空心内针保持在缩回位置;
图22示出了图20的控制器,其将图1的针组件的空心内针保持在伸出位置;
图23示出了图20的控制器的第一部分和第二部分;
图24和图25示出了与图1的针组件一起使用的另一控制器;以及
图26是根据本发明的实施例的卵子获取系统的透视图。
具体实施方式
附图示出了根据本发明的实施例的用于获取人类卵子的针组件10。针组件10具有远端11和近端12。针组件10的远端11具有斜面13。
针组件10包括针形式的外套管20和可滑动地定位在外套管20内的空心内针30。外套管20具有近端21和远端22。远端22具有尖锐的斜面23。空心内针30具有近端31、远端32和远端区域33。空心内针30的远端32具有尖锐的斜面34。
空心内针30具有缩回位置(例如,参见图1)和伸出位置(例如,参见图14)。在缩回位置中,空心内针30的远端区域33设置在外套管20内。在伸出位置中,空心内针30的远端32远离外套管20的远端22,并且空心内针30的远端区域33在外套管20的外部。应当理解,空心内针30可以在缩回位置和伸出位置之间的任何位置延伸。在空心内针30延伸至缩回位置与伸出位置之间的位置的情况下,应当理解,空心内针30的远端32将远离外套管20的远端22,并且空心内针30的远端区域33将至少部分地在外套管20的外部。最佳地,如图6所示,当空心内针30处于缩回位置时,空心内针30的远端区域33与外套管20的形状相符。应当理解,当空心内针30处于缩回位置时,空心内针30的远端区域33在外套管20内基本是笔直的。
参考图14,当空心内针30处于伸出位置时,空心内针30的远端区域33限定弯曲部35。最佳地,如图15所示,弯曲部35是单向弯曲部(即,弯曲部35在固定平面内延伸)。图11至图14示出了空心内针30从缩回位置逐渐变化至伸出位置。从这些图中可以看出,通过使空心内针30相对于外套管20向远侧前进,空心内针30从缩回位置移动到伸出位置。因此,应当理解,通过相对于外套管20向近侧缩回空心内针30,将空心内针30从伸出位置移动到缩回位置。
参考图20至图23,针组件10还包括控制器40,该控制器40用于使空心内针30在缩回位置和伸出位置之间移动。
在取卵过程中,将针组件10的远端11插入受试者的骨盆腔中,然后使用腹腔镜或超声或X射线引导将其导引至卵泡。能够使用腹腔镜经腹部插入针组件10以进行可视化,或者在超声或X射线引导下将针组件10经阴道插入。一旦确定针组件10的远端11位于卵泡的区域中,就将针组件10的远端11轻轻地插入到卵泡中。在针组件10的远端11进入卵泡后,立即向针组件10施加负压(即,真空源),以抽吸卵母细胞和任何卵泡液。
外套管
外套管20可以是16g针或17g针,外套管20的远端22是17g针。描述针的规格时,数字越大,直径越小。
外套管20可以由选自不锈钢、碳纤维、硬塑料、陶瓷和玻璃中的一种或多种材料形成。特别优选的材料包括选自AISI 304、AISI 316、SIS2346和SIS 2543的不锈钢。最优选的材料是AISI 304不锈钢。
外套管20的远端22被构造成刺穿受试者的骨盆腔。外套管20的尖锐斜面23和空心内针30的尖锐斜面34可以是三面的并且无芯。外套管20的远端22可以是不透射线的,从而允许超声或X射线进行识别。例如,外套管20的远端22的外表面可以设置有一个或多个凹槽。这在腹腔镜手术期间和/或在使用超声引导针组件10的插入时特别有用。外套管20的不透射线的远端22的长度可以是大约10mm,并且该远端22与外针20成为一体。
能够用于外套管20的可能的针设计可以具有以下尺寸:
通常,根据具体应用,外套管20可以比空心内针30短约40mm,以允许空心内针30相对于外套管20施加运动。空心内针30的远端区域33占空心内针30和外套管20之间的大约40mm的长度差。
外套管20的内径被构造成允许空心内针30在外套管20内相对运动。
大部分16或17g针可例如从Cook Medical Inc.(Bloomington,Ind.,USA)、SmithsMedical International(Watford,UK)和Gynetics Medical Products N.V.(Achel,Belgium)获得。18g针(1.27mm OD)可从Smiths Medical International获得。
在替代实施例中,外套管20不包括尖锐的斜面23。在这种情况下,当空心内针30处于缩回位置时,空心内针30的远端32从外套管20的远端22突出。在该构造中,针组件10依靠空心内针30的尖锐斜面34来刺穿受试者的骨盆腔和卵泡。
空心内针
空心内针30被构造成可滑动地定位在外套管20内并且可相对于外套管20移动。参考图6,当空心内针30处于缩回位置时,空心内针30的尖锐斜面34和外套管20的尖锐斜面23对准并形成斜面13。斜面13适合于插入受试者的骨盆腔、阴道壁和卵巢卵泡中。
空心内针30的远端32可以是不透射线的,从而允许通过超声或X射线进行识别。例如,空心内针30的远端32的外表面可以设置有一个或多个凹槽。这在腹腔镜手术期间和/或使用超声引导针组件10的插入时特别有用。空心内针30的不透射线的远端32的长度大约为10mm,并且该远端32连接至空心内针30的远端区域33(例如,参见图17)。可以设想,只有空心内针30的远端32将是不透射线的,或者空心内针30的远端32和外套管20的远端22都将是不透射线的。
根据空心内针30不是整体构造的实施例,设想空心内针30的远端32能够被钎焊或焊接到远端区域33上,其中远端区域33也被钎焊或焊接到空心内针30的杆部36上(例如,参见图17)。然而,连接方法可能需要考虑空心内针30的远端32的不透射线性质。连接空心内针30的远端32、远端区域33和杆部36的方法还需要考虑允许空心内针30的远端32和远端区域33在外套管20内伸出和缩回并且不会被卡住或引起摩擦所需的紧密公差。用于连接远端32和远端区域33的连接方法必须确保在取卵过程中远端32不会断开并停留在卵泡内。理想地,空心内针30被制造成直的,以确保公差和制造工艺受到控制,其中在空心内针30组装好之后,在空心内针30的远端区域33中形成弯曲部35。
空心内针30可以是19g针,其是直径比用于外套管20的直径小的针,使得空心内针30能够在外套管20内滑动。
空心内针30的近端31被构造成与管道系统70流体连通,以允许从卵泡内取出和收集卵子。负压泵(未示出)与管道系统70流体连通,使得该负压泵与空心内针30流体连通。负压泵被构造成在空心内针30中产生负压,以从受试者去除卵母细胞卵。应当理解,可以使用本领域中已知的任何合适的真空源来在空心内针30中产生负压。
在一个实施例中,空心内针30比外套管20长。空心内针30的远端区域33解释了空心内针30与外套管20之间的长度差。在特定实施例中,空心内针30可以比外套管20长约39mm。换句话说,空心内针30的远端区域33约为39mm。在该实施例中,当空心内针30处于伸出位置时,弯曲部35的曲率半径约为25mm。参考图18,当空心内针30处于伸出位置时,由空心内针30的远端区域33限定的弯曲部35遵循1/4转的弧,并且空心内针30的远端32设置在远离外套管20的远端22大约25mm的位置处,并且空心内针30的远端32距外套管20的纵向轴线大约25mm。由于在该实施例中远端区域33为39mm长,因此当空心内针30处于伸出位置时,由远端区域33限定的弯曲部35的总弧长为39mm。在另一实施例中,当空心内针30相对于外套管20向远侧推进40mm时,由空心内针30的远端区域33限定的弯曲部35具有25mm的半径。在又一实施例中,空心内针30的长度可以是350mm,然而,该长度将取决于许多因素,包括针的来源、弯曲力特性(如下所述)和手术过程中必要的插入深度。
参考图11至图17,当空心内针30处于缩回位置时,空心内针30的远端区域33与外套管20的形状相符,使得当远端区域33被设置/受限在外套管20内时,远端区域33是直的。最佳地,如图11至图14所示,在空心内针30从缩回位置向伸出位置前进时,随着远端区域33移到外套管20外部的量越来越多,该远端区域33开始限定弯曲部35。应当理解,当空心内针30已经前进到伸出位置时,空心内针30的远端区域33将限定弯曲部35。
空心内针30的远端区域33可以由诸如镍钛合金(Ni-Ti)等超弹性合金制成。镍钛合金是这样一种合金,其特性是发生马氏体到奥氏体相变的温度低于针组件10的工作温度。由空心内针30的远端区域33限定的弯曲部35能够通过将永久弯曲热定型到远端区域33中而形成,使得远端区域33一旦从外套管20伸出,就会保持这种永久的弯曲。
可替代地,空心内针的远端区域33可以由诸如尼龙或聚乙烯等热塑性聚合物制成。可替代地,空心内针30的远端区域33可以由螺旋弹簧(参见图19)制成,该螺旋弹簧覆盖有诸如聚乙烯等弹性体材料。
例如,使用16g或17g外套管20以及19g空心内针30来形成针组件10可能导致更硬、更坚固的针,并且它们一起使用时具有较小的挠曲性。如下所述,刚度和强度对于(在腹腔镜或超声引导过程中)插入受试者的骨盆腔和卵泡是必需的。
能够用于空心内针30的可能的针设计可以具有以下尺寸:
应当理解,外套管20和空心内针30可以具有与上述不同的规格,只要空心内针30能够滑动地设置在外套管20内即可。
在针组件10的替代实施例中,空心内针30由超弹性合金形成。即,整个空心内针30由诸如镍钛合金等单一材料形成。在该实施例中,不需要将远端32连接到远端区域33以及将远端区域33连接到杆部36的连接过程,从而可以减少空心内针30的制造时间。
在针组件10的替代实施例中,空心内针30的远端区域33和远端32由诸如镍钛合金等超弹性合金形成。在该实施例中,形成空心内针30的远端区域33的超弹性合金能够被焊接或连接至在外套管20内滑动的空心内针30的杆部36。在该实施例中,杆部36可以由不锈钢形成。然后对形成空心内针30的远端32的超弹性合金进行加工,以根据需要产生尖锐斜面34。
在另一替代实施例中,空心内针30的远端区域33由诸如镍钛合金等超弹性合金形成。在该实施例中,空心内针30的杆部36和远端32可以由不锈钢形成,其中,仅空心内针30的远端区域33由超弹性合金(例如,镍钛合金)形成。应当理解,在该实施例中,将需要将远端32连接至远端区域33以及将远端区域33连接至杆部36的连接过程。
空心内针的远端区域
如上简要所述,空心内针30的远端区域33可以由以下材料制成:
超弹性合金,例如镍钛合金;
热塑性聚合物;
螺旋弹簧(覆盖有弹性材料);
弹性体;或者
智能聚合物(Flex-2未来研究项目)。
当空心内针30的远端区域33缩回到外套管20的内部时,其必须被拉直,但是当空心内针30的远端区域33从外套管20的远端22伸出时,其必须重新弯曲并限定弯曲部35。基于简化的弯管机制,能够弹性保持的最小曲率半径(R)由下式给出:
R=r/εγ
其中,r是内针的半径,εγ是形成空心内针30的远端区域33的材料的材料屈服应变。
下表给出了16g针(r=0.66mm)的最小针曲率示例:
当考虑为空心内针30和外套管20选择合适的材料时,必须采用以下设计考虑。空心内针30在移动到伸出位置时必须保持足够的弯曲刚度,以允许操作员施加的压力。针组件10的空心内针30和外套管20的方向必须可控,以便当空心内针30处于缩回位置时,外套管20的尖锐斜面23和空心内针30的尖锐斜面34保持基本对准。当空心内针30处于缩回位置时,与外套管20自身相比,针组件10应具有增加的弯曲刚度。
诸如镍钛合金等超弹性合金能够可逆地应变至10%,使得它们将被认为适合用作空心内针30的远端区域33。
形成空心内针30的远端区域33的预弯曲超弹性合金的最终批准需要考虑以下因素:
当空心内针30处于伸出位置时,远端区域33的弯曲刚度;
当空心内针30处于缩回位置时,远端区域33的屈曲阻力。
大多数聚合物能够承受4%或更高的应变而不会屈曲。作为概念的初步证明,聚合物管已被热定型为预弯曲的形状,并且已证明可从15g针可逆地伸出和缩回。尝试了三种不同组成和直径的不同聚合物管。预弯曲半径范围为6mm~20mm。
对于形成空心内针30的远端区域33的预弯曲聚合物的最终考虑因素将包括:
长期性能,确保在空心内针30处于缩回位置时远端区域33笔直地保持在外套管20中的存放期间曲率不会丢失;
当空心内针30处于伸出位置时,远端区域33的弯曲刚度;
当空心内针30处于缩回位置时,远端区域33的屈曲阻力;和
将形成远端区域33的聚合物管连接至空心内针30的杆部36的方法,该空心内针30可以由不锈钢管形成。
弹性体管能够用于远端区域33,其被模制以限定弯曲部35,然后通过使空心内针30在缩回位置和伸出位置之间移动而可逆地拉直和重新弯曲。形成远端区域33的弹性体管的主要问题包括:
当空心内针30处于伸出位置时,支撑足够的弯曲刚度;和
与外套管20的摩擦,导致空心内针30在缩回位置和伸出位置之间移动困难。
螺旋弹簧能够被热定型为预先弯曲的形状,并且通过用弹性体材料覆盖弹簧能够形成能够用于空心内针30的远端区域33的具有高弹性的可弯曲管。图19示出了已被热定型为弯曲形状的未覆盖的螺旋弹簧。
鉴于将空心内针30的远端32插入卵子的精确性质,还必须考虑侧向弯曲的量。空心内针30的远端32理想地应在赤道面(equator)处进入卵子。
在替代实施例中,远端区域33的远端一体地包括具有尖锐斜面34的远端32。即,尖锐斜面34与远端区域33被打断,而不是将具有尖锐斜面34的远端32连接到远端区域33。
空心内针的制造细节
以下是能够用于制造空心内针30的一般制造方法,包括设计变化的选择。所有的设计都基于使用镍钛合金形成空心内针30的远端区域33。
镍钛合金是由大约相等分量的镍和钛组成的合金,其能够被拉成细丝或细管。镍钛合金对于该发明必不可少的特性是“超弹性”,这种特性允许镍钛合金高度变形(拉伸、弯曲、扭曲),并具有充分的恢复能力。
能够实现空心内针30的所需功能的至少三种设计:
使用镍钛合金制造的整个空心内针30;
不锈钢针形成杆部36,镍钛合金形成远端区域33和远端32;
不锈钢形成杆部36和远端32,镍钛合金形成远端区域33。
整个镍钛合金内针:
在这种情况下,因为整个空心内针30是镍钛合金,因此不需要将远端区域33连接到杆部36和远端32的连接过程。尖锐斜面34能够通过切割形成远端32的镍钛合金来形成。
带镍钛合金挠性的不锈钢+尖端:
如上所述,能够将镍钛合金区段焊接或连接至不锈钢的杆部36。然后,将镍钛合金区段加工成所需的具有尖锐斜面34的远端32。这能够通过常规的加工方法来实现,但是该发明可能更适合于诸如激光切割等非常规的加工方法。
不锈钢杆和尖端+镍钛合金柔韧性:
该设计能够使用现有的不锈钢针来提供杆部36和具有尖锐斜面34的远端32。然后,能够将镍钛合金区段(远端区域33)的一端连接至杆部36,另一端连接至远端32,以形成空心内针30。如通常用于使用镍钛合金制造其他医疗装置的方法,能够使用诸如焊接等方法将镍钛合金远端区域33连接至不锈钢。与镍钛合金一起使用的典型焊料合金的成分为96.5%Sn 3.5%Ag,并且熔化温度为221℃。也可以使用其他的连接方法将镍钛合金连接至不锈钢,并且其他的连接方法包括焊接、使用环氧树脂或粘合剂或本领域已知的机械方法。根据所使用的方法,可能需要进行一些修整工艺才能使接缝无毛刺或瑕疵。
现在转到其他组件的制造工艺,空心内针30可以具有不透射线的尖端,以便在X射线或超声下可视化。对于远端32由不锈钢形成的设计,远端32能够来源于现有的令人满意的针。对于远端32由镍钛合金形成的两种设计,镍钛合金具有与不锈钢相似的不透射线特性,这可能足以使用超声或X射线来识别。然而,远端32的可见度能够取决于远端32的最终几何形状和应用环境。如果需要增强的射线不透性,则远端32能够涂覆有金或其他不透射线的材料或使用诸如铂等合金元素。这些材料通常与镍钛合金制成的支架一起使用。
一旦制造出空心内针30,该空心内针30将随后需要被“训练”成所需的弯曲形状,以确保当空心内针30处于伸出位置时,由远端区域33限定的弯曲部35将在单向方向上是可预测的。为了进行该训练,可以将组装好的空心内针30放置在使空心内针30保持在所需形状的成型夹具中。此最后步骤的确切温度和时间可以根据空心内针30的组成和最终几何形状而有所不同,然而,在医疗设备中,常规的做法是在将设备在成型夹具中冷却几个小时之前,将其在500℃下保持约15-20分钟。因为其他处理方法可能会改变镍钛合金的热处理,因此,当制造空心内针30时,由远端区域33限定的弯曲部35所需形状的“训练”或热定型应该是最后一步。加热步骤最通常使用炉子进行,但是也可以使用焦耳电加热来实现。
一旦完成“训练”或热定型过程,就可以组装包括外套管20和空心内针30的针组件10,其中,将空心内针30插入外套管20中,并且连接任何所需的管道系统70。
控制器
参考图20至图23,针组件10包括控制器40,以使空心内针30在缩回位置和伸出位置之间移动。控制器40具有连接至外套管20的第一部分41和连接至空心内针30的第二部分42。第二部分42a可在第一部分41a内滑动。
第一部分包括具有封闭端44的第一狭槽43和具有封闭端46的第二狭槽45。第二部分42包括具有远端48的凸缘47。凸缘47被构造成容纳在第一狭槽43或第二狭槽45中。第二部分42连接至空心内针30,使得当空心内针30处于伸出位置时,凸缘47和弯曲部35在相同的方向上延伸。因此,应当理解,凸缘47向操作者指示空心内针30的远端区域33将弯曲以限定弯曲部35的方向。
图20和图21示出了凸缘47,该凸缘47容纳在第一狭槽43中,使得凸缘47的远端48抵靠第一狭槽43的封闭端44。当凸缘47处于该位置时,空心内针30处于缩回位置,并且外套管20的尖锐斜面23和空心内针30的尖锐斜面34对准并形成斜面13,用于穿过受试者的阴道壁并进入卵巢。缩回位置还将用于将针组件10从受试者撤回。
图22示出了凸缘47,该凸缘47容纳在第二狭槽45中,使得凸缘47的远端48抵靠第二狭槽45的封闭端46。当凸缘47处于该位置时,空心内针30处于伸出位置。
使空心内针30从缩回位置移动到伸出位置包括:
向近侧缩回空心内针30,并从第一狭槽43移除凸缘47;
将凸缘47的远端48插入第二狭槽45;以及
使空心内针30向远侧推进,使得凸缘47在第二狭槽45内滑动,直至凸缘47的远端48抵靠第二狭槽45的封闭端46。
应当理解,对于特定应用,不需要推进空心内针30,直至凸缘47的远端48抵靠第二狭槽45的封闭端46为止,而是能够推进空心内针30,使得凸缘47的远端48沿着第二狭槽45放置在任何位置。
使空心内针30从伸出位置移动到缩回位置包括:
向近侧缩回空心内针30,并从第二狭槽45移除凸缘47;
将凸缘47的远端48插入第一狭槽43;和
使空心内针30向远侧推进,使得凸缘47在第一狭槽43内滑动,直至凸缘47的远端48抵靠第一狭槽43的封闭端44。
控制器40被构造成将空心内针30保持在缩回位置或伸出位置。当凸缘47容纳在第一狭槽43或第二狭槽45中和/或在第一狭槽43或第二狭槽45中滑动时,控制器40限制空心内针30在外套管20内旋转。
图24和图25示出了另一控制器40a,其能够用于使空心内针30在缩回位置和伸出位置之间移动。控制器40a具有将连接至外套管20的第一部分41a和将连接至空心内针30的第二部分42a。
第一部分41a具有小齿轮43a,第二部分42a具有齿条44a。齿条44a和小齿轮43a可操作地相关联,使得通过旋转小齿轮43a使第二部分42a线性移动。小齿轮43a在空心内针30处于伸出位置时与弯曲部35延伸的平面对准的平面中旋转。因此,应当理解,小齿轮43a向操作者指示空心内针30的远端区域33将弯曲以限定弯曲部35的方向。也应当理解,齿条44a和小齿轮43a的相互作用限制了空心内针30在外套管20内旋转。
图24示出了当空心内针30将处于缩回位置时,第二部分42a相对于第一部分41a的位置。图25示出了当空心内针30将处于伸出位置时,第二部分42a相对于第一部分41a的位置。当空心内针30处于缩回位置时,外套管20的尖锐斜面23和空心内针30的尖锐斜面34将对准并形成斜面13,以通过受试者的阴道壁插入卵巢。缩回位置还将用于将针组件10从受试者撤回。
应当理解,其他合适的机构能够用作针组件10的控制器,只要该控制器满足以下要求:
当空心内针30处于缩回位置时,该控制器将外套管20的尖锐斜面23和空心内针30的尖锐斜面34对准;
当空心内针30处于缩回位置或伸出位置时,该控制器限制空心内针30在外套管20内旋转;或者
该控制器允许空心内针30在缩回位置和伸出位置之间移动。
能够用于针组件10的控制器的其他合适机构的示例包括滑动机构或扭转机构等。
管道系统
在实施例中,管道系统70以流体连通的方式连接至空心内针30。管道系统70提供了从针组件到容器(未示出)(例如,试管)的通道,以用于取出卵子。管道系统70与负压泵(未示出)流体连通地连接,以从卵泡内抽出卵子。管道系统70可以是由医用硅橡胶管制造的标准医用管道。管道系统70继而可以连接至Luer锁接头,该Luer锁接头反过来可以连接至与负压泵或其他合适的真空源相连的另一管道系统70。Luer锁可以提供针组件10的冲洗功能。
旋塞阀
针组件10还可以包括旋塞阀50。旋塞阀50与空心内针30、用于储存卵子的容器、和负压泵或其他合适的真空源流体连通。旋塞阀50可在第一构造和第二构造之间移动。在第一构造中,空心内针30与容器和负压泵流体连通。旋塞阀50的第一构造用于获取卵子并将卵子沉积到容器中。在第二构造中,空心内针30与冲洗流体流体连通,以冲洗空心内针30。因此,旋塞阀50允许冲洗空心内针30,然后抽吸回容器,这可以适合于卵母细胞少或卵母细胞收集困难的患者。上述容器可以是医学实验室中使用的标准试管。旋塞阀50允许针组件10用作冲洗针,从而使针组件10增加了多功能性。
负压泵
针组件10被构造成在空心内针30与外套管20之间具有最小的间隙。空心内针30以流体连通的方式连接至负压泵或其他合适的真空源,一旦针组件10刺穿卵泡并取出卵子,该负压泵或其他合适的真空源就被激活并在空心内针30中产生负压。负压泵在空心内针30中产生的负压使卵子通过空心内针30从卵泡内部抽出。这些抽出的卵子随后能够沉积并存储在容器(未示出)中。
负压泵可以是现成的部件,例如240V,30W,50Hz的伦敦Rocket。负压泵在102mm Hg(~13.6kPa)至120mm Hg(~16kPa)左右运行。如果管道系统70或针组件10发生堵塞,则可能需要高达200mmHg的压力。人类卵母细胞的近似直径为0.1mm至0.2mm,卵母细胞周围有卵丘细胞(带),整个细胞团的直径能够高达10mm(Aziz等人,1993)。因此,空心内针30的内径越细,当卵母细胞穿过针组件10时损伤卵母细胞的风险越大。因此,将较细的针用于空心内针30会增加损伤卵母细胞的风险,从而会降低IVF手术导致成功妊娠的可能性。另外,空心内针30的较小内径要求负压泵在针组件10中产生更大的负压。因此,空心内针30的标准最小操作针尺寸可以是22g。
卵子获取系统
图26示出了卵子获取系统,该卵子获取系统包括针组件10;旋塞阀50,其通过管道系统70a以流体连通的方式连接到针组件10的近端12;塞子60,其密封用于收集和储存所获取的卵子的容器(未示出);旋塞阀50通过管道系统70b经由塞子60与容器流体连通;和负压泵,其通过管道系统70c经由塞子60与容器流体连通。
因此,应当理解,负压泵与容器、旋塞阀50和针组件10流体连通。如上所述,旋塞阀50可在第一构造和第二构造之间移动。
套件
针组件10可以作为套件提供。这种套件可以包括以下的一个或多个:
组装好的针组件10;
安装在针组件10上的控制器40、40a;
旋塞阀50;
用于储存所获取的卵子的容器;
将针组件10与容器、旋塞阀50和/或负压泵流体连通地连接的管道系统70;
医用消毒被单;
润滑剂;
能够用作负压泵的注射器,用于通过针组件10获取人类卵子;和/或
纸巾。
方法
下面说明使用针组件10获取人类卵子的一种方法:
a)在空心内针30处于缩回位置的情况下,将针组件10插入受试者的阴道壁并进入卵巢;
b)将针组件10的远端11置于卵子附近;
c)将空心内针30的近端31流体连通地连接至真空源;
d)使用真空源在空心内针30中产生负压;
e)通过空心内针30取出卵子;以及
f)在空心内针30处于缩回位置的情况下,从受试者身上取下针组件10。
下面说明使用针组件10获取人类卵子的另一种方法:
a)在空心内针30处于缩回位置的情况下,将针组件10插入受试者的阴道壁并进入卵巢;
b).将空心内针移动到伸出位置,以使空心内针30的远端32靠近卵子;
c)将空心内针30的近端31流体连通地连接至真空源;
d)使用真空源在空心内针30中产生负压;
e)通过空心内针30取出卵子;
f)将空心内针30移动到缩回位置;以及
g)在空心内针30处于缩回位置的情况下,从受试者身上取下针组件10。
下面说明使用针组件10获取多个人类卵子的另一种方法:
a)在空心内针30处于缩回位置的情况下,将针组件10插入受试者的阴道壁并进入卵巢;
b)将空心内针移动到伸出位置,以使空心内针30的远端32靠近卵子;
c)将空心内针30的近端31流体连通地连接至真空源;
d)使用真空源在空心内针30中产生负压;
e)通过空心内针30取出卵子;
f)将空心内针30移动到缩回位置;
g)在受试者内旋转和/或重新放置针组件10;
h)将空心内针移动到伸出位置,以使空心内针30的远端32靠近卵子;
i)使用真空源在空心内针30中产生负压;
j)通过空心内针30取出另一个卵子;
k)如果需要,重复步骤f至j;
l)将空心内针30移动到缩回位置;以及
m)在空心内针30处于缩回位置的情况下,从受试者身上取下针组件10。
下面说明使用针组件10获取多个人类卵子的另一种方法:
a)在空心内针30处于缩回位置的情况下,将针组件10插入受试者的阴道壁并进入卵巢;
b)将针组件10的远端11置于卵子附近;
c)将空心内针30的近端31流体连通地连接至真空源;
d)使用真空源在空心内针30中产生负压;
e)通过空心内针30取出卵子;
f)在受试者内旋转和/或重新放置针组件10;。
g)将空心内针移动到伸出位置,以使空心内针30的远端32靠近另一个卵子;
h)使用真空源在空心内针30中产生负压;
i)通过空心内针30取出另一个卵子;
j)如果需要,重复步骤b至i;
k)将空心内针30移动到缩回位置;以及
l)在空心内针30处于缩回位置的情况下,从受试者身上取下针组件10。
因此,应理解,针组件10允许针组件10单次进入受试者体内取出多个卵子。
收集多个卵巢卵泡所需的所有针都应在卵巢赤道面(equator)处单次进入。即,通过阴道壁的单次进入可能是取出多个卵子所需的全部。空心内针30在最初插入穿过阴道壁后可以延伸并到达另一个卵子。
在使用中,由于大多数疼痛来自针进入阴道和进入卵巢壁,因此使用针组件10的过程对于受试者可能更舒适,使用针组件10可以减少针进入阴道和进入卵巢壁的次数。
在使用中,针组件10可能会更快地收集卵子,并且减少手术时间。
使用针组件10可以降低出血引起的潜在并发症,所述出血通常是从阴道进入点出血或卵巢入口出血。
使用针组件10可能会减少麻醉剂或减少镇静剂的用量。
空心内针30的远端区域33可以允许在对患者产生较小不适的情况下到达难以触及的卵泡。
力数据
针组件10插入穿过阴道壁需要相当大的载荷和力(这可能导致针组件10弯曲或扭曲而未对准),这是成功取出卵子所必需的。空心内针30从针组件10伸出并仍然保持进入卵巢的穿刺能力的能力是空心内针30的明显特征。在这方面,进行了测试以确定刺穿卵泡所需的力的需求。为了确定合适的壁厚设计标准、空心内针30的挠度以及合适的材料选择,以最大程度地减小通过卵泡内部打开插入点的支点效应,已经积累了力和载荷数据的样本。
通过一系列试验进行了样本卵子收集数据分析。该试验旨在确定使用标准直针采集卵子时所需的穿刺力。总结如下。
卵子收集1
基本读数1978mN
卵子收集2
基本读数2247mN
所报告的最相关的力以“最大力”列出,单位为毫牛顿(mN)。两次试验的最大力为5853mN。针组件10的设计能够允许约为这个水平的3倍的力容许值,即20,000mN。
在针组件10的设计中至少要考虑两个因素:
a)使外套管20的尖锐斜面23与空心内针30的尖锐斜面34对准,并形成针组件10的斜面13;和
b)随后以必要的力推动空心内针30,以便刺穿卵泡。因此,如上所述,空心内针30的力穿刺要求为20,000mN是空心内针30的远端区域33的材料选择的因素,并且也代表了现有针上的弯曲区域的区别点,现有针通常不需要穿刺能力,因为穿刺是通过更大、更硬的针进行的,例如US 6,592,559中所述的那样。
针组件10可以允许在卵巢赤道面处的单个入口,以排出多个卵泡。即,通过阴道壁的单次进入能够取出多个卵子,其中,空心内针30在缩回位置和伸出位置之间移动,以便在最初插入通过阴道壁后到达另外的卵子。由空心内针30的远端区域33限定的弯曲部35被设计成在空心内针30处于缩回位置时被拉直,但是,当将空心内针30移动到伸出位置时,弯曲部35保持适当的刚度和硬度特性,以便可延伸并插入多个卵泡中。
针组件10可以具有当前针(例如,由Wallace制造的那些针)的所有功能,例如无芯的针尖,以最大程度地降低阻塞的风险,回声标记到最尽头的针尖以在超声引导下准确放置,当针组件10与处于缩回位置的空心内针30一起使用时,硅胶塞可轻松安全地安装在试管上,能够在卵母细胞恢复过程中进行连续或间歇冲洗,并且具有真空泵适配器。
针组件10可以提供一种更安全、更简单且疼痛更少的卵母细胞取出方法,该方法可以通过允许在具有麻醉药的临床室和医院环境之外进行手术来改善IVF。这可以降低成本,并且使患者在世界范围内更容易获得IVF。安全、便宜的IVF可以大大增加全球的IVF周期数。
针组件10可以更硬,从而提供更牢固的阴道和卵巢的初始插入。通过使空心内针30的远端区域33前进,允许通过针组件10抽吸和获取不易得到的卵泡。单个进入点可以提供更少的疼痛并降低受试者的出血风险。针组件10的使用可以潜在地降低所需麻醉剂的量。
本领域技术人员将理解的是,在不脱离如广泛描述的本发明的精神或范围的情况下,可以对具体实施例中所示的本发明进行多种变化和/或修改。因此,本实施例在所有方面都应被认为是说明性的而不是限制性的。
附图标记列表
10–针组装件
11–针组件10的远端
12–针组件10的近端
13–针组件10的斜面
20–外套管
21–外套管20的近端
22–外套管20的远端
23–外套管20的远端22的尖锐斜面
30–空心内针
31–空心内针30的近端
32–空心内针30的远端
33–空心内针30的远端区域
34–空心内针30的远端32的尖锐斜面
35–弯曲部
36–空心内针30的杆部
40–控制器
41–控制器40的第一部分
42–控制器40的第二部分
43–控制器40的第一部分41的第一狭槽
44–第一狭槽43的封闭端
45–控制器40的第一部分41的第二狭槽
46–第二狭槽的封闭端
47–控制器40的第二部分42的凸缘
48–凸缘47的远端
40a–控制器
41a–控制器40a的第一部分
42a–控制器40a的第二部分
43a–控制器40a的第一部分41a的小齿轮
44a–控制器40a的第二部分42a的齿条
50–旋塞阀
60–塞子
70–管道系统。