一种二维扫描激光雷达系统
文献发布时间:2023-06-19 12:05:39
技术领域
本发明属于激光雷达领域,更具体地,涉及一种二维扫描激光雷达系统。
背景技术
激光雷达是无人驾驶、安防测绘等领域必不可少的必要探测工具,通过发射激光对视场二维扫描和接收回波,信号处理单元计算出飞行时间,可以得出与目标的距离,进而实现对视场的三维成像,进而可以分辨物体、地貌等实时的三维信息。激光雷达系统包括扫描式激光雷达,其主要分为传统机械式旋转扫描、全固态扫描和MEMS(微机电系统)的混合固态扫描。旋转扫描式激光雷达操作灵活,利用单点发射激光光源就可实现面阵视场探测,通过计算发射激光与散射回波信号接收时间差来实现其测距功能。
传统二维扫描的激光雷达系统中,目前采用的有分别基于MEMS微振镜和基于光学相控阵(Optical phased array,OPA)的扫描系统。完全基于MEMS微振镜进行二维扫描视场的激光雷达,受双轴MEMS驱动限制,其二维扫描速度慢、反馈速度慢;对于完全基于OPA进行二维扫描视场的激光雷达,由于现有OPA的二维扫描通常需要激光波长调谐和热相移器分别实现对视场的一个维度的扫描,这种OPA式激光雷达同时实现激光波长调谐与热相移器的控制比较复杂,尤其是大阵列,功耗、面积也将急剧增加。
发明内容
针对相关技术的缺陷,本发明的目的在于提供一种二维扫描激光雷达系统,旨在解决现有激光雷达系统二维扫描速度慢、控制比较复杂的问题。
为实现上述目的,本发明提供了一种二维扫描激光雷达系统,包括激光发射系统、MEMS振镜和激光接收系统;
所述激光发射系统包括光学耦合的发射器和光学相控阵,用于发出激光;其中,所述光学相控阵调节所述发射器发出激光的方向,对视场中的第一方向进行扫描;
所述MEMS振镜位于光的通路上,对视场中的第二方向进行扫描,其中所述第二方向垂直于所述第一方向;
所述激光接收系统用于接收返回的激光回波。
进一步地,还包括透镜;
光经MEMS振镜反射后通过透镜发出或接收,扩大激光雷达的视角场。
进一步地,所述光学相控阵通过调节激光波长或者电热控制实现光束扫描。
进一步地,所述MEMS振镜采用压电或者电磁驱动。
进一步地,所述MEMS振镜的扫描方式为点扫描或线扫描。
进一步地,所述二维扫描激光雷达系统中距离的测量采用连续波调制(FMCW)或者时间飞行测量方法。
进一步地,所述激光接收系统为光探测器阵列。
进一步地,所述激光接收系统包括光学耦合的发射器和光学相控阵;
其中,所述激光接收系统中的光学相控阵与所述激光发射系统中的光学相控阵为同一个光学相控阵。
本发明的另一方面还提供了一种二维同步扫描激光雷达系统,包括激光发射系统、第一MEMS振镜和激光接收系统;
所述激光发射系统包括光学耦合的发射器和第一光学相控阵,用于发出激光;其中,所述第一光学相控阵调节所述发射器发出激光的方向,对视场中的第一方向进行扫描;
所述第一MEMS振镜位于光的通路上,对视场中的第二方向进行扫描,其中所述第二方向垂直于所述第一方向;
所述激光接收系统包括接收器、第二MEMS振镜和第二光学相控阵,用于接收返回的激光回波,其中所述第二MEMS振镜与第一MEMS振镜同步转动,所述第二光学相控阵与第一光学相控阵同步扫描。
进一步地,所述接收器为光探测器。
通过本发明所构思的以上技术方案,与现有技术相比,避免了二维MEMS镜片角度误差较大、扫描速度慢、驱动控制复杂的缺点,仅使用单轴MEMS微振镜实现对视场中特定方向激光的扫描,与之垂直的方向则由OPA实现扫描,OPA扫描速度快,可以实现高速的二维扫描,且OPA本身也有易于集成的优势,同时还保留了OPA对环境光、其他雷达干扰不敏感的特点,减小了驱动控制的复杂度,同时可实现整个激光雷达收发系统的高速、高精度的三维成像。
附图说明
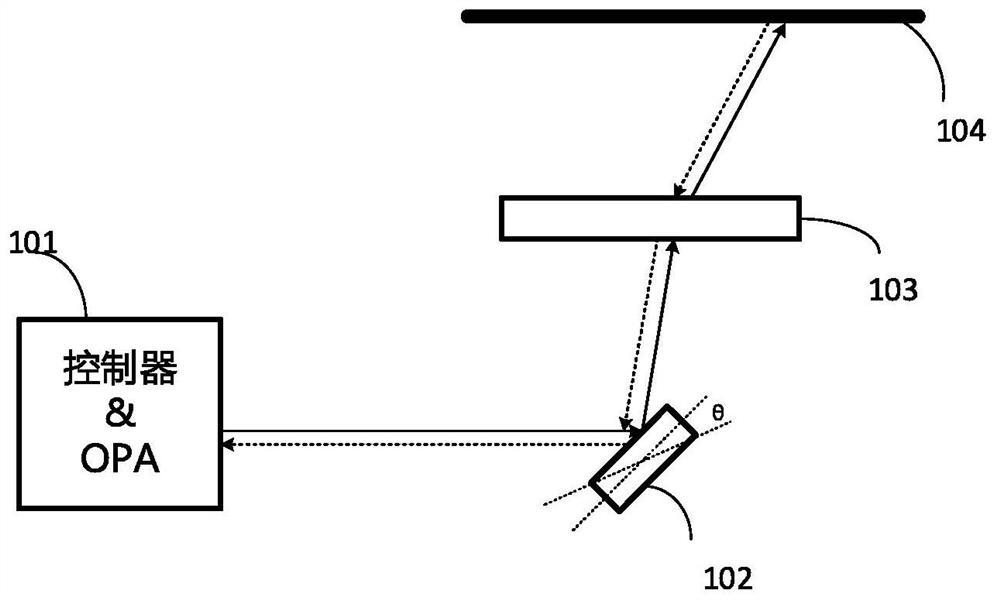
图1是本发明实施例同轴相邻的激光雷达系统示意图;
图2是本发明实施例的双轴激光雷达系统示意图;
图3是本发明实施例非共轴光路的同步扫描激光雷达系统示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
下面以不同的激光雷达结构为例,介绍本发明的具体实现应用。
实施例一
对于同轴相邻的激光雷达系统,图1为本发明的一个具体实施例。收发器件101包括控制器和OPA,单束发射激光在二维视场中不经扫描为一个点或多个激光器对应多个点,在发射端OPA首先通过激光波长调节或者热相移器控制,发射激光在视场进行垂直方向或者水平方向的点扫描,MEMS微振镜102经驱动控制对激光进行与OPA扫描方向垂直的方向点扫描,透镜103可扩大视场,104为视场中的目标物体示意图,从而实现对视场的二维扫描。视场中的目标物体104的反射回波经由同样的反射光路被光电探测器检测,经信号处理生成飞行时间的数据,进而实现激光雷达系统的三维成像。该系统显然地避免使用双轴MEMS微振镜,仅使用单轴MEMS微振镜即可,简化了驱动难度,并且由于与之扫描方向相垂直方向上的点扫描由扫描速度快的OPA来完成,极大加快了视场二维扫描的速度。
实施例二
对于双轴激光雷达设计系统,图2为本发明的一个具体实施例。该系统由一个OPA、一个MEMS微振镜以及两个镜片和光电探测器构成。
201为发射端,包括发射激光源、发射端OPA,202为发射端的MEMS微振镜,203、205为透镜可扩大视场,204为视场中目标物体示意图。206为接收端的光探测器阵列。
对于该双轴激光雷达,下面对其工作原理进行描述:发射端201发出激光并经过发射端的OPA对视场的垂直或水平方向进行扫描,接着发射端MEMS微振镜202对与之垂直的另一视场方向进行扫描,从而实现整个发射端对视场的二维扫描。经透镜203激光打到视场中目标物体204,反射光经过透镜205后打到接收端光探测器阵列206上。由于发射端完成单点激光在视场中的二维扫描,接收端光探测器阵列单点接收激光。
实施例三
对于接收端和发射端同步扫描激光雷达系统,图3为本发明的一个具体实施例。301为发射端,包括发射激光源、发射端OPA,302为发射端的MEMS微振镜,303为接收端的MEMS微振镜,304为接收端的OPA以及光探测器,305为视场中的目标物体示意图。
对于该异轴光路激光雷达,下面对其工作原理进行描述:发射端301发出激光并经过发射端的OPA对视场的垂直或水平方向进行扫描,发射端MEMS微振镜302对与之垂直的另一视场方向进行扫描,从而实现整个发射端对视场的二维扫描。视场中的目标物体305发射光首先经过接收端的MEMS微振镜303进行与发射端的MEMS微振镜302同步的扫描,接着在304中接收端OPA与发射端OPA同步的扫描,从而在接收端实现与发射端同步的扫描;视场中的目标物体305反射光经由接收端303单轴MEMS、304中一维OPA被304中光电探测器接收并经过信号处理,产生对应的飞行时间数据,再结合其他信号处理,从而实现激光雷达收发系统的三维成像。
优选的,加入透镜以扩大激光雷达的视角场。
以上异轴光学收发系统激光发射光路与接收光路完全分离,排除了发射产生的杂散光对接收系统干扰。
本发明提出一种基于一维OPA和单轴MEMS微振镜的激光雷达系统,采用OPA实现一个维度的快速扫描,在与之垂直的维度采用MEMS微振镜扫描,实现对视场的二维激光扫描与回波接收,进而通过后端信号处理实现激光雷达收发系统的三维成像功能,从而可加快系统的扫描速度并极大简化了纯MEMS微振镜二维扫描的驱动控制。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。