一种新概念水下无人航行器
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及船舶与海洋工程技术领域,具体涉及一种新概念水下无人航行器。
背景技术
水下无人航行器(AUV)是人类探索深海的重要工具,它是一条具有高度现代化与智能化的“鱼”,为人类的海洋工程事业带来了难以估量的效益。在民用领域,可以使用AUV替代人力完成一些较为复杂环境下的海洋学科考调查,如海洋水文调查、海洋环境监测、海水科学取样、水下探测、水下运维等,大大的节省了人力资源,提升了人员工作时的安全性。在军工领域,AUV已经成为最新型的水下作战平台,它的信息化水平将越来越高,结构也会向着简单化的趋势发展,但它的功能将会趋于多样化,甚至可以作为水下隐形攻击性武器或武器承载,自适应能力将异常强大。
但传统的AUV往往仅适用于某一项单独的任务,对于多任务的场合一般需要多台设备交替完成,且其续航能力受制于水下的航行阻力以及AUV本身体积决定的电池容。同时,当AUV进行资源勘探、信息采集等任务时,面对严重故障或无法规避的安全威胁,其采集到的信息无法有效的传递给工程人员,事故后打捞故障设备或回收设备碎片耗时耗力。
因此,亟需设计一种新概念水下无人航行器。
发明内容
本发明的目的在于提供一种新概念水下无人航行器,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种新概念水下无人航行器,包括航行器本体,所述航行器本体的外结构为扁平型,所述航行器本体的内部设置有首舱、控制舱、能源舱、通信舱、压载调整舱、推进舵桨舱,所述航行器本体上设置有逃逸系统、首部泄露检测仪、功能转换模块接口、侧扫声呐、尾部泄露检测仪和数据存储系统。
进一步的,上述新概念水下无人航行器中,所述首舱的内部设置有紊流探测仪、声呐转化器、无线电以太网板和前视声呐装置。
进一步的,上述新概念水下无人航行器中,所述控制舱的内部设置有控制系统、下潜跟踪仪、电机伺服控制器和计算机。
进一步的,上述新概念水下无人航行器中,所述能源舱的内部设置有设备电源。
进一步的,上述新概念水下无人航行器中,所述通信舱的内部设置有GPS单元和通信定位系统。
进一步的,上述新概念水下无人航行器中,所述推进舵桨舱的内部设置有推进系统和尾部螺旋桨。
进一步的,上述新概念水下无人航行器中,所述航行器本体的外侧设置有潮汐发电装置。
进一步的,上述新概念水下无人航行器中,所述航行器本体的顶部设置有太阳能板。
进一步的,上述新概念水下无人航行器中,所述航行器本体采用系铝合金为支撑结构。
进一步的,上述新概念水下无人航行器中,所述航行器本体的外壳表面喷涂疏水材料。
与现有技术相比,本发明的有益效果是:
1、本发明中航行器本体底部设计的功能转换模块接口可与多个功能模块进行对接,可根据需要从民用或科研用转化为军用,结合逃逸系统可实现侦查、探测、跟踪或战略性打击的功能,使航行器适应各种工况与任务,保证其拥有更加灵活且广泛的应用。
2、本发明中航行器本体底部的“黑匣子”逃逸系统可保证内部数据的安全保存,在遇到事故时,黑匣子从航行器本体脱离并浮出水面,便于工程人员收集;若遭遇打击,逃逸系统可在根据预先设置的参数延迟发送信号的时间,防止数据被敌方获取。
3、本发明中航行器本体顶面设置有太阳能板,配合潮汐能发电装置可实现绿色新能源的有效转化,在长期的无人操作任务中可实现自主充电,以延长航行器的续航时间。
4、本发明中航行器本体参考鳐鱼的外形采用扁平型设计,并配合无轴轮缘推进器和疏水表面涂料将较好的动力性能和较好的静音与隐身性能结合,为特殊时期的军用需求作预先准备。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
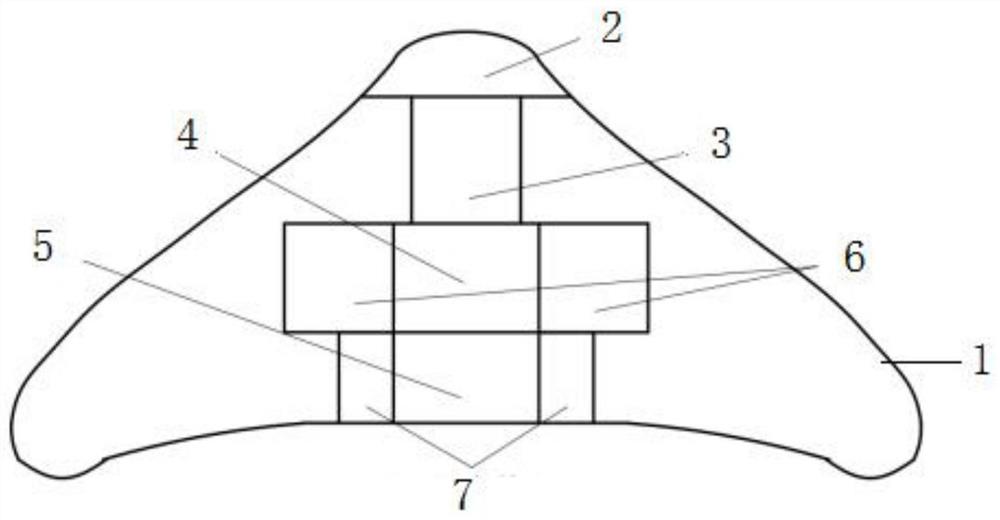
图1为本发明主体布置图;
图2为本发明总布置图;
图3为本发明航行器上部布置图;
图4为本发明航行器底部布置图;
图5为本发明控制原理图;
附图中,各标号所代表的部件列表如下:
1-航行器本体,2-首舱,201-紊流探测仪,202-声呐转化器,3-控制舱,301-控制系统,302-下潜跟踪仪,303-电机伺服控制器,304-计算机,4-能源舱,401-设备电源,5-通信舱,501-GPS单元,502-通信定位系统,6-压载调整舱,7-推进舵桨舱,701-推进系统,702-尾部螺旋桨,8-逃逸系统,9-首部泄露检测仪,10-功能转换模块接口,11-侧扫声呐,12-尾部泄露检测仪,13-数据存储系统,14-潮汐发电装置,15-太阳能板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一
一种新概念水下无人航行器,包括航行器本体1,航行器本体1的外结构为扁平型,扁平型水下航行器具有优异的垂直面和水平面阻力性能和航行运动稳定性,垂直侧面目标回声强度低,具有很好的隐蔽性,航行器本体1的内部设置有首舱2、控制舱3、能源舱4、通信舱5、压载调整舱6、推进舵桨舱7,航行器本体1上设置有逃逸系统8、首部泄露检测仪9、功能转换模块接口10、侧扫声呐11、尾部泄露检测仪12和数据存储系统13。
航行器本体1采用6系铝合金为支撑结构,选用玻璃钢和ABS耐腐蚀耐压耐冲击材料作为其外壳。
航行器本体1的外壳表面喷涂疏水材料,用于进一步降低航行器的水下阻力。
航行器本体1的外侧设置有潮汐发电装置14,航行器本体1的顶部设置有太阳能板15,太阳能板15外部由透明PC塑料层作为保护,当航行器本体执行长期任务时,电量小于额定值则上浮充电。
功能转换模块接口10位于航行器本体1的底部,用于连接多种设备以实现海洋资源勘探、水下工程施工、海洋领土保护等功能,如外接小型机械手、声呐探测仪、收集器、潮汐能发电器、小型军用武器、小型光源。
逃逸系统8设置于航行器本体底部,当航行器本体受到严重故障或受到安全威胁时,黑匣子会携带备份的数据快速脱离航行器本体,由于密度小于水黑匣子将逐渐浮于水面,特殊情况时可设置黑匣子的信号发送延迟时间。
本方案选用无轴轮缘推进器作为动力源配合压载调整舱6实现高效运动,航速范围为3.5-5节。
本方案中,控制系统电性连接有无线电通信链、水声指令通信链。水声数据通信链、导航系统、逃逸系统、推进系统和能源系统,如图5所示。
实施例二
在实施例一的基础上,首舱2的内部设置有紊流探测仪201、声呐转化器202、无线电以太网板203和前视声呐装置204。
实施例三
在实施例一的基础上,控制舱3的内部设置有控制系统301、下潜跟踪仪302、电机伺服控制器303和计算机304。
实施例四
在实施例一的基础上,能源舱4的内部设置有设备电源401。
实施例五
在实施例一的基础上,通信舱5的内部设置有GPS单元501和通信定位系统502。
实施例六
在实施例一的基础上,推进舵桨舱7的内部设置有推进系统701和尾部螺旋桨702。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种新概念水下无人航行器
- 一种水下无人航行器航姿转换机构及操作方法