一种双船吊装拆除海上平台用光学定位机构及方法
文献发布时间:2024-01-17 01:14:25
本申请是母案名称为“一种双船吊装拆除海上平台用光学定位机构”的发明专利的分案申请;母案申请的申请号为:CN201910147339.7;母案申请的申请日为:2019.02.27。
技术领域
本发明涉及海洋工程装备技术领域,特别是涉及一种双船吊装拆除海上平台用光学定位机构及方法。
背景技术
海上平台是海洋资源开采的关键装备。目前世界上有近8000座海上平台。一般海上平台的设计寿命在20年左右。按照相关规定,若没有其他用途,作业寿命到期后必须进行废弃拆除。这对保障作业区域的海洋环境、通航和渔业生产等具有重要意义。
与油田开发不同,平台弃置本身并不会给平台所有者带来直接效益,这就要求不断降低其支出成本。如何更加高效地进行平台弃置作业,是各海洋工程公司考虑的重点方向。
各大石油公司采取最直接的方法就是对海上平台进行分解拆除,即通过浮吊摘除和拆分上部组块,将由此产生的金属碎片和组块卸载到一艘驳船上,再运送到岸上回收中心。这种方法作业时间长,可长达数十上百天,容易产生环境污染,费用较高。另外一种方法是整体拆除法。整体拆除是利用平台拆除船实现的。目前,瑞典船东Allseas拥有目前世界上最大的平台拆除船“Pioneering Spirit”号。该船采用双体船设计,船头呈U字形,可以各靠在钻井平台的一侧,船头装有多台杠杆式起重机,这些起重机通过单次作业,将整个重达数万吨的上部组块吊起并移除。这种方法作业时间短,两三天就能完成拆除任务,平台可再利用或者回收,但费用仍非常高。
目前业界正在论证多种可能降低成本的方案。一种比较有优势的方案是利用两艘通用半潜式拖船代替整体拆除法用的单艘拆除船,利用水箱和支撑机构代替杠杆式起重机,如图1所示。这种方法被称为双船起重法,其工作过程是两艘同样的动力定位半潜式拖船(拆除船1)从两侧靠近海上平台2,将船体支撑柱3与导管架(即支撑海上平台的钢架)支撑柱(平台支撑柱4)对准后,双船开始浮起,并通过压载水箱5保持平衡,将海上平台2上部组块提升,移至第三艘运载船6上运走(如图2所示)。
采用双船起重法的第一步是两艘具有动力定位能力的半潜式拖船从两侧靠近海上平台,将船体支撑柱与导管架(即支撑海上平台的钢架)支撑柱对准后,将上部组块提升。这是双船起重法面临的一个关键。目前业界采用的方法是靠近过程采用RTK GPS定位,接近导管架时辅以激光雷达等非接触光学定位方法。这样单侧至少要配备2部激光雷达才能进行精准定位,成本较高。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种双船吊装拆除海上平台用光学定位机构及方法。
本发明的目的可以通过以下技术方案来实现:
本发明提供一种双船吊装拆除海上平台用光学定位机构,用以在双船起重法中实现船体支撑柱与平台支撑柱的精确对准,所述平台支撑柱下表面开设椎体凹槽,所述船体支撑柱上表面为一与所述椎体凹槽形状配合的凸锥体,该定位机构包括安装在所述凸锥体内上的激光发射器和光敏传感器以及设置在所述椎体凹槽底面的反光镜,所述反光镜的反光系数高于导管架支撑柱底部的材料,所述反光镜的半径等于设定的对准精度;
在进行对准操作时,当所述船体支撑柱与所述平台支撑柱未对准时,所述激光发射器向上发出的垂直光线作用在导管架支撑柱底部材料上,反射较弱,此时所述船体支撑柱未移动到对准位置,当所述船体支撑柱与所述平台支撑柱对准时,所述激光发射器向上发出的垂直光线作用在所述反光镜上,形成反射光,通过所述光敏传感器接收产生阶跃信号,此时所述船体支撑柱移动到对准位置。
优选地,所述激光发射器采用激光二极管。
优选地,所述光敏传感器采用光敏电阻。
本发明还提供一种双船吊装拆除海上平台用光学定位方法,基于以上所述的双船吊装拆除海上平台用光学定位机构,包括以下步骤:
1)两艘动力定位半潜式拖船依靠RTK GPS定位信息从两侧靠近海上平台0.5m范围内;
2)接通船体支撑柱处的激光发射器并向上发射激光;
3)控制单元在接收GPS信息的同时,开始接收光敏传感器的信息;
4)当光敏传感器无阶跃信号输出时,表明船体支撑柱尚未移动到期望的位置,当光敏传感器有阶跃信号输出时,表明船体支撑柱与平台支撑柱的相对位置已经在期望的误差范围内;
5)控制单元核对GPS信息,若GPS信息也表明船体支撑柱与平台支撑柱的相对位置已经在期望的误差范围内,则开始提升海上平台。
与现有技术相比,本发明具有以下优点:
本发明提出的双动力定位船吊装拆除海上平台用光学定位机构及方法,在船体支撑柱装有激光发射器和光敏传感器,另一侧的平台支撑柱装有反光镜,使反光镜的半径等于要求的对准精度,通过光敏传感器是否接收到反射回的激光实现了对船体支撑桩是否移动到期望位置的判断,与GPS信息相融合,有效提高了对接的精度和可靠性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为双船起重法拆除海上平台结构示意图。
图2为双船起重法双船工作过程示意图。
图3为船体支撑桩与导管架支撑桩对接示意图,其中,图(3a)为完全对准时的结构示意图,图(3b)为在对准的极限情况下的结构示意图,图(3c)为可靠对准的精度要求示意图。
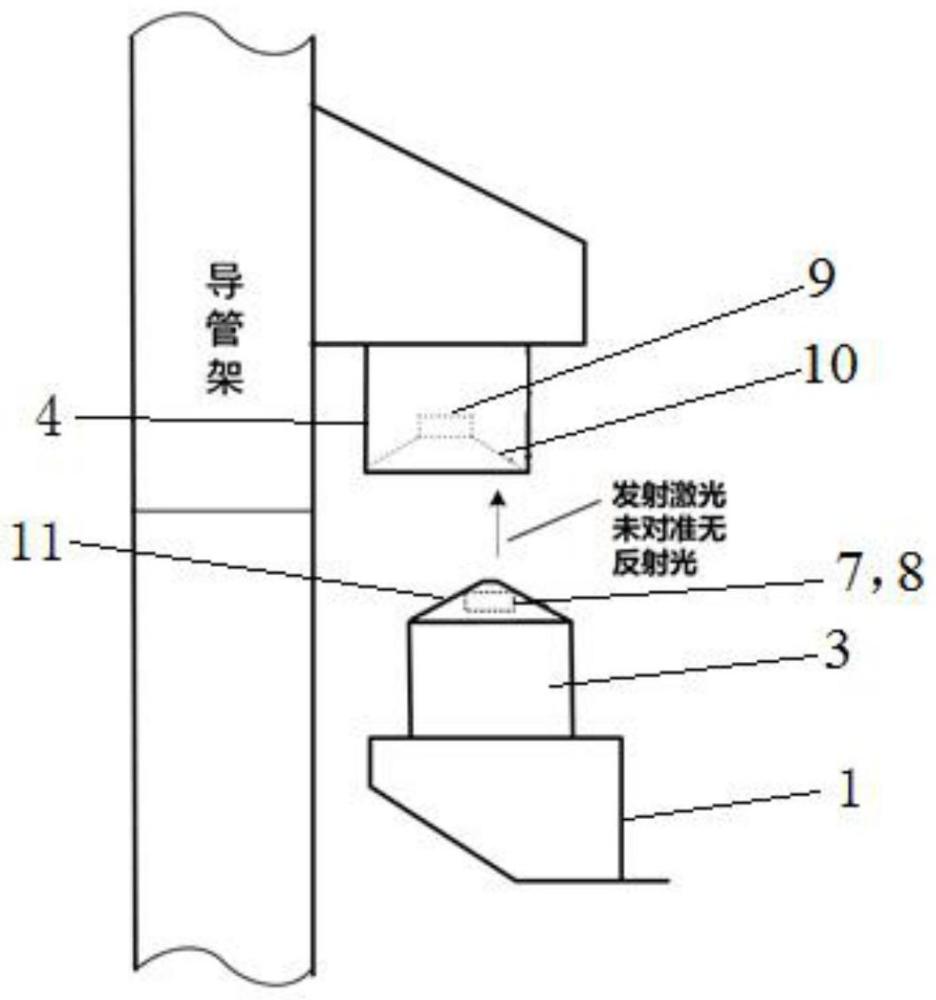
图4为本发明在未对准时的结构状态图。
图5为本发明在对准时的结构状态图。
图中:1-拆除船、2-海上平台、3-船体支撑柱、4-平台支撑柱、5-压载水箱、6-运载船、7-激光发射器、8-光敏传感器、9-反光镜、10-椎体凹槽、11-凸锥体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例
如图3所示,平台支撑柱4下表面开设椎体凹槽10,船体支撑柱3上表面为一与椎体凹槽10形状配合的凸锥体11,船体支撑柱3与平台支撑柱4对接采用锥形对接面,这种对接面的显著优点是降低了对对准精度的要求,理论上,只要椎尖落在平台支撑柱4最大圆周内部,船体支撑柱3与平台支撑柱4就能在压力作用下保证对准。而圆柱插孔对接面对精度的要求则高得多。在实际中,为了保证对接的可靠,对对准精度的要求要小于平台支撑柱4最大圆周半径。
在应用GPS时,流动站的位置不断变化,坐标解算是动态的,存在系统误差,降低了测量精度。大面积水面将对电磁波信号产生强反射作用,使得天线同时接收有直接从卫星发射的信号和从水面反射的电磁波信号,这两种信号叠加形成的观测量,将对定位结果产生多路径误差,严重时可引起GPS信号失锁。为了保证对接,一般希望有两种或以上的方式保证船体支撑柱3与平台支撑柱4的对准精度。本发明提出的光学定位机构能够提供一种精度更高的手段,与GPS结合使用,提高对接的安全性。
本发明提出的船体支撑柱3与平台支撑柱4对接光学定位机构如图4和5所示,与原有的船体支撑柱3与平台支撑柱4对接机构相比,本发明提出的光学定位机构包括两个部分,一部分是加装在船体支撑柱3处的激光发射器7和光敏传感器8,一部分是加装在平台支撑柱4底部的反光镜9。激光发射器7可采用但不限于激光二极管,该器件在激光笔中有广泛的应用;光敏传感器8采用光敏电阻但不限于光敏电阻,是一种被广泛使用的光敏器件;反光镜9没有严格要求,只要反光系数明显高于平台支撑柱4底部的材料即可。反光镜9的半径等于要求的对准精度。当未对准时,激光发射器7发出的垂直光线作用在平台支撑柱4底部材料上,反射较弱,表明船体支撑柱3尚未移动到期望的位置。当对准时,激光发射器7发出的垂直光线作用在反光镜9上,形成强度较大的反射,通过光敏器件(光敏传感器8)接收产生阶跃信号,通知控制单元船体支撑柱3已经移动到期望的位置。控制单元通过对GPS信息和光敏传感器8信息的融合,提高了对接的精度和可靠性。
双船起重法最终要将平台上部组块提升移至第三艘运载船6上运走。本发明提出的对接光学定位机构同样可应用于平台上部组块在运载船上的固定,其具体实施步骤如下:
1、两艘动力定位半潜式拖船依靠RTK GPS定位信息从两侧靠近海上平台0.5m范围内;
2、船体支撑柱3处的激光发射器7接通,开始发射激光;
3、控制单元在接收GPS信息的同时,开始接收光敏传感器8的信息;
4、当光敏传感器8无阶跃信号输出时,表明船体支撑柱3尚未移动到期望的位置;
5、当光敏传感器8有阶跃信号输出时,表明船体支撑柱3与平台支撑柱4的相对位置已经在期望的误差范围内;
6、控制单元核对GPS信息,若GPS信息也表明船体支撑柱3与平台支撑柱4的相对位置已经在期望的误差范围内,开始提升海上平台2。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。