粒子线治疗装置
文献发布时间:2024-01-17 01:19:37
本申请主张基于2022年1月28日申请的日本专利申请第2022-011819号的优先权。该日本申请的全部内容通过参考援用于本说明书中。
技术领域
本发明涉及一种粒子线治疗装置。
背景技术
以往,已知有下述专利文献1~专利文献3中所记载的粒子线治疗装置。这些粒子线治疗装置具备:机架,在搭载有照射粒子线的照射部的治疗台的周围旋转;及移动地板,配置于机架的内侧并对治疗室进行分隔,并且在治疗台的周围在环状轨道上进行旋绕移动。移动地板的环状轨道由沿着机架的旋转周向的曲线部分和沿着治疗室的地板的水平部分构成。相对于照射部在圆形轨道上旋转,移动地板在如上述那样的非圆形的环状轨道上进行移动,因此在移动地板与照射部之间产生的间隙根据照射部的旋转位置而发生变动。
如上所述,在下述专利文献1及专利文献2的粒子线治疗装置中,移动地板可滑动地连接于照射部的侧面,以覆盖在移动地板与照射部之间产生的间隙。在该机构中,在环状轨道上的其他部位产生移动地板的间隙,而不是覆盖照射部的侧面的间隙。该间隙的宽度根据照射部的旋转位置而发生变动,因此用宽度可变的卷取式罩覆盖上述间隙。在下述专利文献3的粒子线治疗装置中也同样地,采用了卷取式罩,以覆盖移动地板与照射部的间隙等。
专利文献1:日本特开2011-156263号公报
专利文献2:日本特开2017-12374号公报
专利文献3:日本特开2019-201730号公报
发明内容
然而,如上述那样的卷取式罩需要是能够卷取的相对软的部件,因此未必能够充分地支承人的体重。如此一来,在间隙位于移动地板的环状轨道中的水平部分时,即使用卷取式罩覆盖该间隙,也不能说人能够在移动地板上安全地行走。因此,在专利文献1~专利文献3的粒子线治疗装置中,不能说是以可确保安全性的方式覆盖了移动地板的间隙的状态。鉴于该课题,本发明的目的在于提供一种能够以可确保安全性的方式覆盖照射部与移动地板的间隙的粒子线治疗装置。
本发明的粒子线治疗装置具备:照射部,具有对被照射体照射粒子线的照射喷嘴并能够在被照射体的周围进行旋转移动;移动地板,沿着照射部的旋转周向在围绕被照射体的环状轨道上延伸,能够根据照射部的位置在该环状轨道上移动;活动罩,相对于照射部或移动地板可转动地被支承,覆盖照射部与移动地板的间隙;及调节机构,根据照射部的位置来调整活动罩的转动位置,以覆盖活动罩与移动地板之间的间隙。
可以是,活动罩相对于照射部可转动地被支承,调节机构具有:第1支承部,设置于照射部并枢轴支承活动罩的一个部位;及第2支承部,设置于移动地板并支承活动罩的其他部位,第2支承部允许活动罩在将该第2支承部与第1支承部连结的直线方向上的位移。
可以是,调节机构具有导轨,该导轨设置于活动罩并在将第1支承部与第2支承部连结的直线上延伸,第2支承部包括在导轨上滚动的辊。可以是,活动罩相对于照射部可转动地被支承,并能够横跨环状轨道而向该环状轨道的外侧区域突出。可以是,移动地板具有在环状轨道上沿着移动地板的移动方向排列的多个地板部件,并能够在地板部件彼此之间弯曲。
发明效果
根据本发明,能够提供一种能够以可确保安全性的方式覆盖照射部与移动地板的间隙的粒子线治疗装置。
附图说明
图1是表示组装有本实施方式的带电粒子线照射装置的带电粒子线治疗系统的图。
图2是表示从治疗室侧观察带电粒子线照射装置的状态的立体图。
图3是采取了包括旋转轴线的铅垂截面的带电粒子线照射装置的剖视图。
图4是采取了与旋转轴线正交的铅垂截面的带电粒子线照射装置的剖视图。
图5是表示取出带电粒子线照射装置的移动地板并从机械室侧观察的状态的立体图。
图6是表示从机械室侧观察图5的移动地板与照射部的位置关系的状态的立体图。
图7是表示从治疗室侧仰视向治疗室侧突出的照射部附近的状态的立体图。
图8的(a)是表示活动罩的立体图,图8的(b)是从图6中的箭头VIIIb方向观察的包括辊的向视图。
图9是表示照射部从图4的状态旋转移动到治疗台的斜下方的状态的剖视图。
图10是包括调节机构的变形例的带电粒子线照射装置的剖视图。
图中:3-照射部,31-治疗室,35-移动地板,37-环状轨道,37a-曲线部分,37b-水平部分,39-地板部件,51-照射喷嘴,59-活动罩,64-铰接部(第1支承部),63-调节机构,65-外端侧支承部(第2支承部),67-导轨,69-辊,100-带电粒子线照射装置(粒子线治疗装置),J-间隙,P-患者(被照射体)。
具体实施方式
以下,参考附图,对本发明的粒子线治疗装置的实施方式进行详细说明。另外,在各附图中,存在分别夸张地描绘特征的情况等,附图上的粒子线治疗装置的各部位的尺寸比、形状未必与实物一致,在各附图之间也未必一致。如图1所示,本实施方式的带电粒子线照射装置100(粒子线治疗装置)被组装于带电粒子线治疗系统103(例如,质子束治疗系统)。带电粒子线照射装置100为对患者P(被照射体)的内部的病灶(例如,肿瘤等)照射带电粒子线并进行治疗的装置。在此,带电粒子线例如为质子束、重粒子束等。
带电粒子线治疗系统103具备:加速器105,对带电粒子进行加速而射出带电粒子线;照射部3,对患者P照射带电粒子线;旋转机架13,使照射部3在患者P所躺卧的治疗台7的周围围绕水平的旋转轴线A旋转;及输送线路107,将加速器105与照射部3进行连接并将带电粒子线从加速器105输送到照射部3。其中,带电粒子线照射装置100具备输送线路107的一部分、旋转机架13及照射部3。输送线路107具有:多个四极电磁体113,用于使带电粒子线收敛;及多个偏转磁铁115,使带电粒子线弯曲。而且,输送线路107具有使所输送的带电粒子线中的所期望的能宽的带电粒子线选择性地穿过的多个ESS(未图示)。
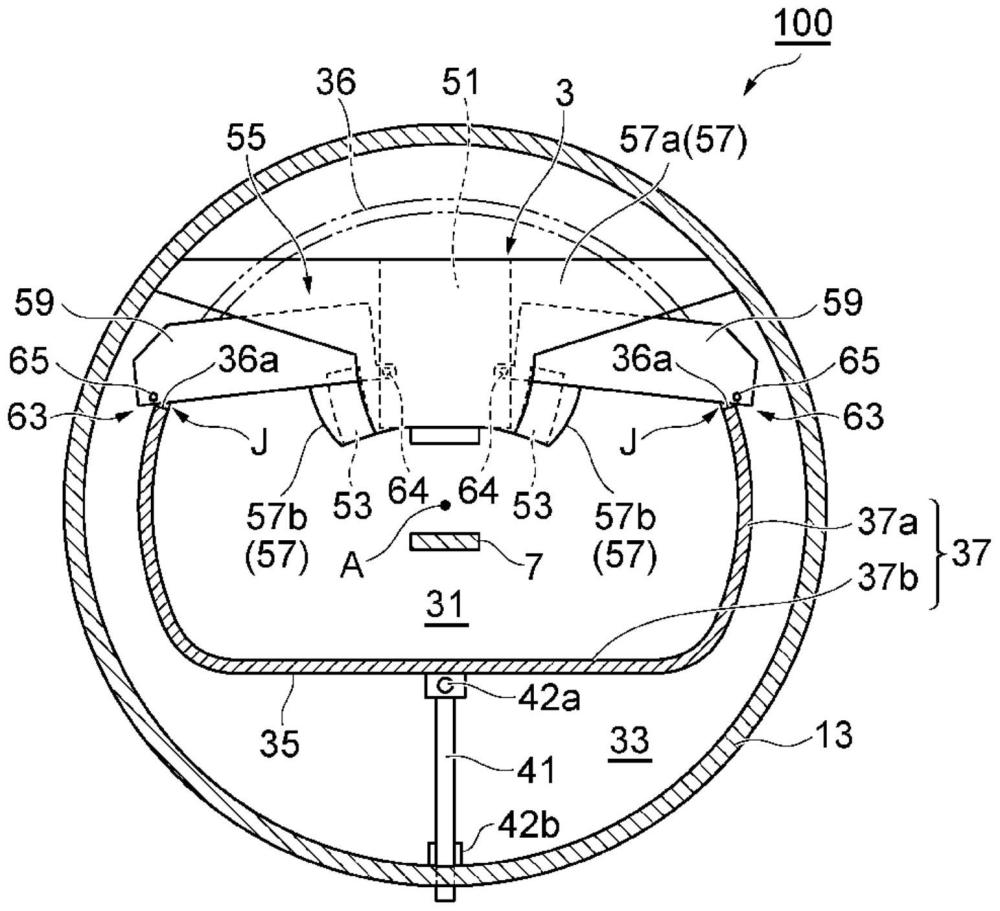
图2是表示从治疗室侧观察带电粒子线照射装置100的状态的立体图。图3是采取了包括旋转轴线的铅垂截面的带电粒子线照射装置100的剖视图,图4是采取了与旋转轴线正交的铅垂截面的带电粒子线照射装置100的剖视图。
如图2~图4所示,旋转机架13形成以旋转轴线A为圆筒轴的圆筒状。旋转机架13的轴向的长度例如为8m,直径例如为6m。另外,旋转机架13不限于可旋转的圆筒状,也可以是具有可围绕旋转轴线A摆动180°的框体的结构。在旋转机架13的圆筒内周面侧配置照射部3,照射部3经由规定的支架而固定于旋转机架13。通过旋转机架13围绕旋转轴线A旋转,照射部3以使带电粒子线的出射方向朝向旋转机架13的径向内侧的姿势围绕旋转轴线A进行旋转移动。即,照射部3能够在治疗台7上配置于旋转轴线A上的患者P的周围进行旋转移动,能够从各种方向对患者P照射带电粒子线。另外,治疗台7经由用于使该治疗台7在治疗室内移动的臂部而固定于建筑物的房屋27。
如图3所示,在旋转机架13的下方设置有配置于房屋27的地板面上的两处的辊装置29,以使旋转机架13如上述那样旋转。旋转机架13的轴向两端部的外周面分别与辊装置29抵接,由马达(未图示)驱动辊装置29,由此对旋转机架13施加围绕旋转轴线A的旋转驱动力。并且,由辊装置29的制动装置(未图示)停止旋转机架13的旋转。
配置上述治疗台7的治疗室31从房屋27内遍及旋转机架13的内侧区域的一部分而配置。如图2~图4所示,在旋转机架13的内侧设置有移动地板35,以将治疗室31与旋转机架13的内侧的机械室33分隔。图5是表示取出移动地板35并从机械室33侧观察的状态的立体图。如图4及图5所示,移动地板35遍及以环状围绕旋转轴线A的环状轨道37整体以环状延伸,并且在旋转轴线A方向上以规定的宽度(例如为2m左右的宽度)以带状扩展。移动地板35随着旋转机架13的旋转而在上述环状轨道37上移动。以与旋转轴线A平行的视线观察时(如图4那样观察时),环状轨道37具有:曲线部分37a,沿着旋转机架13及照射部3的旋转周向延伸;及水平部分37b,水平地延伸以连结曲线部分37a的2个下端部,并且环状轨道37整体形成隧道形状。该环状轨道37的内侧空间为治疗室31的一部分,治疗的患者P、治疗人员等能够在该空间内往来。
如图3所示,在房屋27设置有固定环38,该固定环38悬臂支承向旋转机架13的内侧区域伸出的移动地板35,并且引导移动地板35的移动。以与旋转轴线A平行的视线观察时,固定环38沿着环状轨道37以隧道形状设置,在允许环状轨道37上的移动地板35的移动的状态下保持该移动地板35。如图5所示,移动地板35由排列并铺满在环状轨道37上的多个地板部件39构成,各地板部件39分别可滑动地保持于固定环38。地板部件39为沿着旋转轴线A方向延伸的长尺寸的板状部件。相邻的地板部件39彼此可以以能够围绕与旋转轴线A平行的轴线相对旋转的方式结合。根据该结构,移动地板35能够在地板部件39彼此之间弯曲,整体能够一边依循环状轨道37的形状弯曲并变形一边在该环状轨道37上移动。
移动地板35具备能够在悬臂支承于固定环38的状态下充分地支承人的体重的程度的刚性及强度。如图3所示,环状轨道37的水平部分37b沿着房屋27中的治疗室31的地板31a而存在,水平部分37b中的移动地板35的上表面位于与地板31a大致同一平面上。因此,治疗的患者P、治疗人员等能够在治疗室31内的地板31a及从地板31a延伸的移动地板35上行走。
用于使移动地板35在环状轨道37上移动的机构如下。如图3及图4所示,移动地板35经由沿着旋转径向延伸的驱动杆41与旋转机架13连结。驱动杆41的一端经由具有与旋转轴线A平行的铰接轴的铰接部42a与构成移动地板35的地板部件39中的1个连接。驱动杆41的另一端由旋转机架13的杆保持部42b保持为可在旋转径向上滑动。杆保持部42b例如形成LM导件的结构。
根据该机构,若通过辊装置29而旋转机架13围绕旋转轴线A旋转,则经由驱动杆41而将旋转周向的驱动力也传递至移动地板35,移动地板35以追随旋转机架13的方式在环状轨道37上移动。此时,通过移动地板35的移动而铰接部42a与杆保持部42b的距离发生变动时,驱动杆41的另一端侧通过杆保持部42b在径向上滑动,由此吸收上述距离变动。此时,驱动杆41能够沿着径向贯穿旋转机架13并进行滑动,因此在旋转机架13设置有用于插入滑动的驱动杆41的空间。
除了如上述那样的移动地板35以外,在旋转机架13的内侧还设置有将治疗室31与机械室33在旋转轴线A方向上分隔的铅垂分隔壁45。从治疗室31内观察时,铅垂分隔壁45沿着移动地板35的里侧的边缘,以与旋转轴线A正交的铅垂姿势配置。例如,铅垂分隔壁45形成比旋转机架13的内径稍小的直径且在旋转轴线A的位置具有中心的圆盘状。例如,使铅垂分隔壁45旋转的马达(未图示)固定于旋转机架13,通过该马达而铅垂分隔壁45相对于旋转机架13能够围绕旋转轴线A相对旋转。在通过辊装置29而使旋转机架13旋转时,马达使铅垂分隔壁45反转以抵消该旋转,由此铅垂分隔壁45成为相对于治疗室31静止的状态。因此,铅垂分隔壁45可作为用于将治疗室31与机械室33分隔的静止的铅垂壁发挥作用。
并且,如图1及图3所示,旋转机架13支承输送线路107的下游侧的一部分(称为“输送线路107a”)。输送线路107a例如包括使带电粒子线收敛的四极电磁体113、使带电粒子线弯曲的偏转磁铁115等。输送线路107a的下游端与照射部3连接,输送线路107a的上游端通过旋转机构(未图示)与其上游侧的输送线路107的部分连接。输送线路107a随着旋转机架13的旋转而围绕旋转轴线A旋转。
如图2~图4所示,照射部3从机械室33侧横跨环状轨道37而向治疗室31内突出。照射部3具有朝向治疗台7上的患者P照射从输送线路107a输送的带电粒子线的照射喷嘴51。而且,照射部3具有:X射线管53,以在旋转周向上夹着照射喷嘴51的方式设置有一对;及支架(未图示),将照射喷嘴51及X射线管53固定于旋转机架13。X射线管53为CT装置(未图示)的一部分,CT装置用于患者P的CT摄像。根据通过CT摄像获得的CT图像来识别患者P的病灶等的位置并进行治疗台7上的患者P的定位。
如图5所示,在移动地板35设置有照射部插入口36,以使该照射部3向治疗室31内突出。在构成移动地板35的多个地板部件39包括旋转轴线A方向的长度长的地板部件(称为“地板部件39t”)和短的地板部件(称为“地板部件39s”)这两种。并且,在移动地板35存在连续配置有地板部件39t的区域和连续配置有地板部件39s的区域这2个区域。其中,在连续配置有地板部件39s的区域中,从治疗室31内观察时,在跟前侧存在地板部件39s,在其里侧成为在与铅垂分隔壁45(图3)之间形成有上述照射部插入口36的状态。照射部3插入到该照射部插入口36并向治疗室31内突出。
图6是表示从机械室33侧观察图5的移动地板35与插入到上述照射部插入口36的照射部3的位置关系的状态的立体图。图7是表示从治疗室31侧仰视向治疗室31侧突出的照射部3附近的状态的立体图。如图4、图6及图7所示,照射部3从上述照射部插入口36向治疗室31内突出,在照射部3设置有用于覆盖照射喷嘴51及X射线管53的照射部罩55。如图7所示,照射喷嘴51及X射线管53的主要部分被照射部罩55覆盖,由此从治疗室31侧看不到。
在照射部罩55中包括:固定罩57,相对于照射喷嘴51及X射线管53位置固定;及活动罩59,能够相对于照射喷嘴51及X射线管53位移。固定罩57具有:照射喷嘴罩57a,从治疗室31内观察时覆盖照射喷嘴51的正面侧及下表面侧;及弯曲形状的X射线管罩57b,覆盖X射线管53的周围。另外,照射喷嘴罩57a与X射线管罩57b在活动罩59的下方连结。固定罩57例如可以固定于将照射喷嘴51及X射线管53固定于旋转机架13的上述支架(未图示)。另外,在照射喷嘴罩57a的上方,在与环状轨道37的曲线部分37a之间产生间隙,但是该间隙例如被上述支架的端面堵住。
活动罩59位于与移动地板35的照射部插入口36的移动方向上的边缘部36a(图4、图5)相邻的位置。并且,活动罩59在其一端枢轴支承于照射部3。在活动罩59与边缘部36a之间,在移动地板35的移动方向上形成间隙J。具体而言,活动罩59中的后述的平行罩部59b与移动地板35的边缘部36a隔着间隙J而相对。如图4所示,从照射部3观察时,边缘部36a存在于旋转方向的前方及后方这两者,因此与此相对应,一对活动罩59夹着照射部3对称地设置于前方及后方。图8的(a)是表示活动罩59的立体图。另外,图8的(a)表示一对活动罩59中的一个,但是关于另一个活动罩59,形成与图8的(a)左右对称的形状,因此省略图示及说明。
如图8的(a)所示,活动罩59整体形成“L”字状截面的形状,且具有:正交罩部59a,位于与旋转轴线A正交的平面内;及平行罩部59b,位于与旋转轴线A平行的平面内。在平行罩部59b形成有用于避免与固定罩57的X射线管罩57b的干涉的矩形缺口59c。活动罩59的一端在铰接部64枢轴支承于该照射喷嘴51,铰接部64具有与旋转轴线A平行的铰接轴。即,以与旋转轴线A平行的视线观察时(如图4那样观察时),活动罩59以能够以铰接部64为中心转动的方式,在一端侧支承于照射喷嘴51。如图4所示,铰接部64设置于在照射喷嘴51上与照射部3的旋转位置无关地始终位于环状轨道37的内侧区域的部位。活动罩59的另一端到达环状轨道37的外侧的位置,另一端侧的一部分向环状轨道37的外侧伸出。
在旋转机架13中设置有调节机构63,该调节机构63能够与照射部3的旋转移动相对应地调整活动罩59的转动位置,使得与照射部3的旋转位置无关地始终覆盖间隙J。另外,“覆盖间隙J”未必是指间隙J为零的状态,而是指间隙J足够小到治疗室31内的人(例如,患者P、治疗人员、装置维护人员等)的身体的一部分或全部不会进入间隙J中的程度的状态。并且,由调节机构63调整的间隙J的大小可以比上述更小。例如,由调节机构63调整的间隙J的大小可以是如满足与照射部3的旋转位置无关地始终从治疗室31内通过间隙J看不到机械室33的条件那样的大小。调节机构63具有:上述铰接部64(第1支承部),设置于照射部3的照射喷嘴51并枢轴支承活动罩59的一端部;及外端侧支承部65(第2支承部),设置于移动地板35并支承活动罩59的其他部位。
外端侧支承部65形成允许活动罩59在将该外端侧支承部65与铰接部64连结的直线方向上的位移的机构。另外,外端侧支承部65还允许以该外端侧支承部65为中心的活动罩59的旋转。作为这样的机构的具体例,调节机构63具有设置于活动罩59的截面“ㄈ”字状导轨67(图8的(a))。该导轨67在将铰接部64与外端侧支承部65连结的直线上延伸。2个导轨67分别设置于平行罩部59b的两个边缘,并在与旋转轴线A正交的方向上平行地延伸。铰接部64位于导轨67的一端部。外端侧支承部65包括与导轨67卡合并且在该导轨67上滚动的辊69(图8的(b))。
图8的(b)是从图6中的箭头VIIIb方向观察的包括上述辊69的向视图。如图8的(b)所示,外端侧支承部65具有固定于移动地板35中的形成边缘部36a的地板部件39t的托架71。托架71在与边缘部36a之间夹着平行罩部59b的位置沿着旋转轴线A方向延伸。外端侧支承部65具有分别设置于托架71的旋转轴线A方向的两端的上述辊69。在本实施方式中,如图4所示,以与旋转轴线A平行的视线观察时,2个辊69位于环状轨道37的稍外侧,并位于照射部插入口36的边缘部36a的最近处。通过该各辊69分别嵌入到各导轨67的内侧并在该导轨67内滚动,活动罩59能够相对于辊69在导轨67的延伸方向上位移。
对基于具备以上说明的旋转机架13及照射部3的带电粒子线照射装置100的作用效果进行说明。如上所述,照射部3随着旋转机架13的旋转而在圆形轨道上旋转。另一方面,移动地板35随着旋转机架13的旋转而在非圆形的环状轨道37上移动。这样,由于照射部3与旋转机架13的移动轨迹不一致,若假设活动罩59固定于照射部3,则如几何学上理解那样,间隙J的大小随着照射部3及移动地板35的旋转而发生变动。尤其,在本实施方式中,照射部3为横跨移动地板35的环状轨道37而向治疗室31内突出的结构,因此间隙J的大小的变动明显。
对此,在带电粒子线照射装置100中,活动罩59相对于照射部3可转动地被支承,并且由调节机构63,根据照射部3的旋转位置来调整活动罩59的转动位置,始终覆盖间隙J。例如,如图9所示,在照射部3向治疗台7的斜下方移动时,与图4的状态相比,活动罩59中的一个(在图中由59A的符号表示)相对于照射部3向逆时针方向相对改变转动位置,并且以向环状轨道37的外侧大幅伸出的方式位移(即,以向机械室33侧大幅进入的方式位移)。这样,通过活动罩59改变转动位置来覆盖间隙J。
并且,活动罩59为改变相对于照射部3的转动位置而覆盖间隙J的结构,因此无需根据间隙J的大小而使活动罩59本身变形。因此,活动罩59能够由硬质的非挠性部件构成,例如,能够对活动罩59赋予能够支承人的体重的程度的刚性及强度。例如与上述专利文献1~专利文献3的卷取式罩不同,活动罩59可以由金属制造。如此一来,例如,如图9所示,在活动罩59A位于环状轨道37的水平部分37b附近的情况下,即使移动地板35上的患者P、治疗人员等踩到活动罩59A,活动罩59A也能够安全地支承患者P、治疗人员等的体重。即,患者P、治疗人员等能够在移动地板35上安全地行走,因此可以说是照射部3与移动地板35之间的间隙被活动罩59A覆盖而能够确保安全性的状态。
并且,在如由调节机构63调整的间隙J的大小满足与照射部3的旋转位置无关地始终从治疗室31内通过间隙J看不到机械室33的条件那样的情况下,能够使得从与治疗有关的患者P通过隐藏间隙J无法看到机械室33的机械结构体。
并且,若假设采用由卷取式罩覆盖间隙J的方式,则需要对卷取式罩施加张力,因此卷取式罩容易受损,维护频率有可能增加。对此,无需对活动罩59施加张力,因此与使用卷取式罩的方式相比,可实现罩部的长寿命化。
并且,在调节机构63中,活动罩59的一端部经由铰接部64枢轴支承于照射喷嘴51,活动罩59的其他部位在边缘部36a的最近处由外端侧支承部65支承,外端侧支承部65形成允许活动罩59在将该外端侧支承部65与铰接部64连结的直线方向上的位移的机构。根据这样的机构,活动罩59自动改变转动位置而始终穿过边缘部36a的最近的外端侧支承部65,因此间隙J自动被活动罩59覆盖。
其结果,可始终维持与照射部3的旋转位置无关地覆盖了平行罩部59b与边缘部36a的间隙J的状态。这样,活动罩59自动转动,因此无需用于驱动活动罩59的动力源、用于控制活动罩59的转动角度的控制部。并且,调节机构63由如枢轴支承活动罩59的铰接部64、设置于活动罩59的截面“ㄈ”字状的导轨67及在该导轨67上滚动的辊69那样的简单的机械元件构成,因此能够由通用的零件构成调节机构63。
并且,移动地板35由沿着移动方向排列的地板部件39t、39s构成。其中,在连续配置有地板部件39s的区域中,从治疗室31内观察时,仅在跟前侧存在移动地板35的地板部件39s,在其里侧存在从照射部插入口36突出的照射部3。因此,在照射部3位于环状轨道37的水平部分37b的情况下,治疗室31内的患者P、治疗人员等通过踩踏存在于比照射部3更靠跟前侧的地板部件39s而能够在移动地板35上行走。
并且,活动罩59能够由位于环状轨道37的内侧区域的铰接部64枢轴支承并且横跨环状轨道37而向该环状轨道37的外侧区域(机械室33侧)突出,因此即使在铰接部64与辊69的距离最大的情况下,突出部分也被引入到环状轨道37的内侧区域,能够用活动罩59覆盖间隙J。
并且,移动地板35具有在环状轨道37上沿着移动地板35的移动方向排列并铺满的地板部件39,并能够在地板部件39彼此之间弯曲。根据该结构,移动地板35能够依循环状轨道37的隧道形状变形,通过用不过度或不足地填埋环状轨道37的多个地板部件39形成移动地板35,能够确保移动地板35上的患者P、治疗人员等的行走的安全。
本发明以上述的实施方式为首,能够以根据本领域技术人员的知识实施了各种变更、改进的各种方式来实施。并且,还能够利用上述的实施方式中所记载的技术事项构成变形例。可以将各实施方式等的结构适当组合来使用。
例如,在上述实施方式中,调节机构63不具有动力源而使活动罩59转动,但是调节机构63也可以具有用于使活动罩59转动的动力源。作为其一例,如图10所示,调节机构63可以具有:步进马达75,使活动罩59相对于照射喷嘴51围绕铰接部64转动;及控制电路(未图示),控制该步进马达75的旋转角度。上述控制电路控制步进马达75的旋转角度,以调整活动罩59的转动位置,使得活动罩59的平行罩部59b始终位于移动地板35的边缘部36a(图5)的最近处。即,通过利用上述控制电路进行的步进马达75的控制来调整活动罩59的转动位置,成为始终覆盖了间隙J的状态。此时,还能够省略包括导轨67、辊69的外端侧支承部65。若省略包括导轨67、辊69的外端侧支承部65而采用步进马达75及控制电路,则活动罩59不会对移动地板35作用力,因此移动地板35的动作稳定性增加。并且,若除了包括导轨67、辊69的外端侧支承部65以外还采用步进马达75及控制电路,则活动罩59及移动地板35的动作稳定性得到提高。
并且,在上述实施方式中的外端侧支承部65中,作为允许活动罩59在将该外端侧支承部65与铰接部64连结的直线方向上的位移的机构,采用了组合导轨67和辊69而成的机构,但是外端侧支承部65并不限于该机构。例如,外端侧支承部65可以采用经由LM导件将活动罩59与移动地板35可滑动地连接的机构。
并且,在上述实施方式中,活动罩59相对于照射部3可转动地被支承,但是将活动罩59可转动地支承的对象不限于照射部3。例如,可以为,活动罩59相对于移动地板35以覆盖活动罩59与移动地板35的间隙的方式可转动地被支承,调节机构63具有用于使活动罩59转动的动力源(例如马达)。
并且,间隙J的大小可以根据照射部3的位置而发生变动。但是,此时,间隙J的大小在足够小到治疗室31内的人的身体的一部分或全部不会进入间隙的程度的范围内发生变动。或者,间隙J的大小可以在如满足与照射部3的旋转位置无关地始终从治疗室31内通过间隙J看不到机械室33的条件那样的范围内发生变动。