一种用于滚筒渣处理的智能化进料系统及方法
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及冶金行业冶炼环保渣处理技术领域,尤其涉及一种用于滚筒渣处理的智能化进料系统及方法。
背景技术
滚筒法渣处理技术是目前世界上最先进的炉渣处理技术之一。具有流程短、投资少、安全可靠、能耗低等特点。处理后的钢渣能够直接利用,污染少。现有滚筒法渣处理技术进料系统的动作主要依赖操作人员个体技能,通过操作人员肉眼识别、判断来料原始状况,比如渣的温度、每罐渣的装载量,进而凭借操作人员的个体经验,手动或者遥控控制每罐渣的进料速度、渣罐倾翻系统的角度和速度、扒渣系统和清渣系统的作业动作等等,这对操作人员工作技能要求较高,哪怕可以通过工业电视监控叠加遥控控制,可以将操作人员从高温、多尘、强噪的作业环境中解放出来,但是还是无法消除和避免操作人员操作失误带来的设备损坏或者人员伤害,同时还是无法降低该系统对操作人员技能熟练度的依赖。
鉴于此,本发明一种用于滚筒渣处理的智能化进料系统,以期解决现有技术存在的问题。
发明内容
本发明的目的是提供一种用于滚筒渣处理的智能化进料系统及方法,实现滚筒渣处理的进料系统智能化作业,减少对操作人员技能的依赖,提高生产效率,降低劳动强度,实现滚筒渣处理技术应用于冶金高温、多尘、强噪环境下的智慧制造应用场景。
本发明的目的是提供一种用于滚筒渣处理的智能化进料系统,包括:
渣罐倾翻系统,用于获取车间需要粒化处理的高温冶金渣物料,并倒入滚筒系统中,在所述物料执行倾翻作业过程中,实时监控所述物料状态信息并传送至监测系统;
滚筒系统,用于获取所述渣罐倾翻系统倾翻的所述物料,将所述物料处理为低温/常温状态,同时将无规则尺寸的所述物料处理成为预设规格尺寸;
扒渣系统,用于将无法靠重力流自动注入所述滚筒系统的所述物料通过扒渣方式注入所述滚筒系统;
清渣系统,用于对所述物料注入所述滚筒系统过程中,粘附在进料漏斗内壁的残余物料进行机械清理以避免通道堵塞;
监测系统,用于采集并监测原始的所述物料状态信息及渣处理过程中各系统运行时产生的状态变化信息;
移动收尘装置,用于动态收集渣处理过程中产生的烟尘并进行净化处理。
作为优选地,所述扒渣系统还用于根据预设程序自动将放置在所述渣罐倾翻系统上渣罐中的所述物料扒入所述滚筒系统中的进料漏斗中,随着所述物料的进入的速度变化和数量变化,所述滚筒系统上具备称重功能的料筒支撑机构上的负载产生相应的变化信息,并且将所述变化信息发送至所述监测系统执行相应的自动化控制操作;
所述监控系统还用于当所述滚筒系统上具备称重功能的料筒支撑机构上的负载大于预设阈值,则对放置在所述渣罐倾翻系统上的渣罐倾翻进料速度进行减速调节自动化控制,同时对所述扒渣系统上扒渣执行部件朝上下、左右、前后方向运动的速度进行自动化控制;
当所述滚筒系统上具备称重功能的料筒支撑机构上的负载小于预设阈值,则对放置在所述渣罐倾翻系统上的渣罐倾翻进料速度进行加速调节自动化控制,同时对所述扒渣系统上扒渣执行部件朝上下、左右、前后方向运动的速度进行自动化控制。
作为优选地,所述滚筒系统包括料筒支撑机构,所述料筒支撑机构上设有称重传感器,用于实时采集所述滚筒系统内所述物料的承重数据,并将所述称重数据传输至所述监测系统,从而为所述扒渣系统和所述渣罐倾翻系统发出的下一步操作指令提供依据。
作为优选地,所述物料状态信息至少包括:所述物料温度、渣量及渣的形态,所述状态变化信息包括进料速度、所述渣罐倾翻系统的倾角信息和速度信息、所述扒渣系统和所述清渣系统的作业动作。
作为优选地,所述渣罐倾翻系统包括渣罐、支撑框架和具备倾翻功能的第一执行机构,所述渣罐设置在所述支撑框架中,所述具备倾翻功能的第一执行机构内设有具备液压马达的行星减速机,所述支撑框架的输出轴通过联轴器与所述具备液压马达的行星减速机连接,控制所述渣罐沿其周向转动;靠近所述第一执行机构设有第二执行机构,用于控制所述渣罐、所述支撑框架和所述具备倾翻功能的第一执行机构三者联合运动。
作为优选地,所述渣罐倾翻系统还包括:
渣罐倾角测量器,设置在所述支撑框架上,用于实时测量所述渣罐的倾角信息并传输至所述监测系统;
称重传感器,设置在所述支撑框架上,用于实时测量当前所述物料剩余重量信息并传输至所述监测系统。
作为优选地,所述扒渣系统包括位置反馈装置,当扒渣执行部件运行至预设极限位置,触发电信号向所述扒渣执行部件发送关闭指令,并将当前的位置信息传输至所述监测系统执行到位后相应的自动化控制操作,即自动确定所述扒渣系统自身动作的速度和角度以控制所述扒渣执行部件多自由度操作,对从所述渣罐倾翻系统获取到的所述物料执行扒渣操作从而实现所述物料扒入所述滚筒系统的精准性。
作为优选地,所述清渣系统包括位置反馈装置,当清渣执行部件运行至预设极限位置,触发电信号向所述扒渣执行部件发送关闭指令,并将当前的位置信息传输至所述监测系统执行到位后相应的自动化控制操作,即自动确定所述清渣系统自身动作的速度和角度控制所述清渣执行部件多自由度操作,对粘附在所述滚筒系统进料漏斗内壁上面的所述物料进行机械清理。
作为优选地,所述监测系统包括:
温度传感器,用于采集并监测渣罐中当前所述物料的温度数据;和/或,
雷达,用于采集并监测渣罐中当前所述物料的液位数据;
3D扫描装置,用于检查渣罐及所述物料实时状态;
图像视频数据处理器,用于采集并监控渣处理过程中的图像和视频;
动作控制器,用于按照预设算法执行进料操作。
本发明的目的还提供了一种用于滚筒渣处理的智能化进料方法,包括:
获取车间需要粒化处理的高温冶金渣物料,并倒入滚筒系统中,在所述物料执行倾翻作业过程中,实时监控所述物料状态信息并传送至监测系统;
获取所述渣罐倾翻系统倾翻的所述物料,将所述物料处理为低温/常温状态,同时将无规则尺寸的所述物料处理成为预设规格尺寸;
将无法靠重力流自动注入所述滚筒系统的所述物料通过扒渣方式注入所述滚筒系统;
对所述物料注入所述滚筒系统过程中,粘附在进料漏斗内壁的残余物料进行机械清理以避免通道堵塞;
采集并监测原始的所述物料状态信息及渣处理过程中各系统运行时产生的状态变化信息;
动态收集渣处理过程中产生的烟尘并进行净化处理。
与现有技术相比,本发明具有如下的有益效果:
本发明提供一种用于滚筒渣处理的智能化进料系统,实现滚筒渣处理的进料系统智能化作业,减少对操作人员技能的依赖,提高生产效率,降低劳动强度,实现滚筒渣处理技术应用于冶金高温、多尘、强噪环境下的智慧制造应用场景。
附图说明
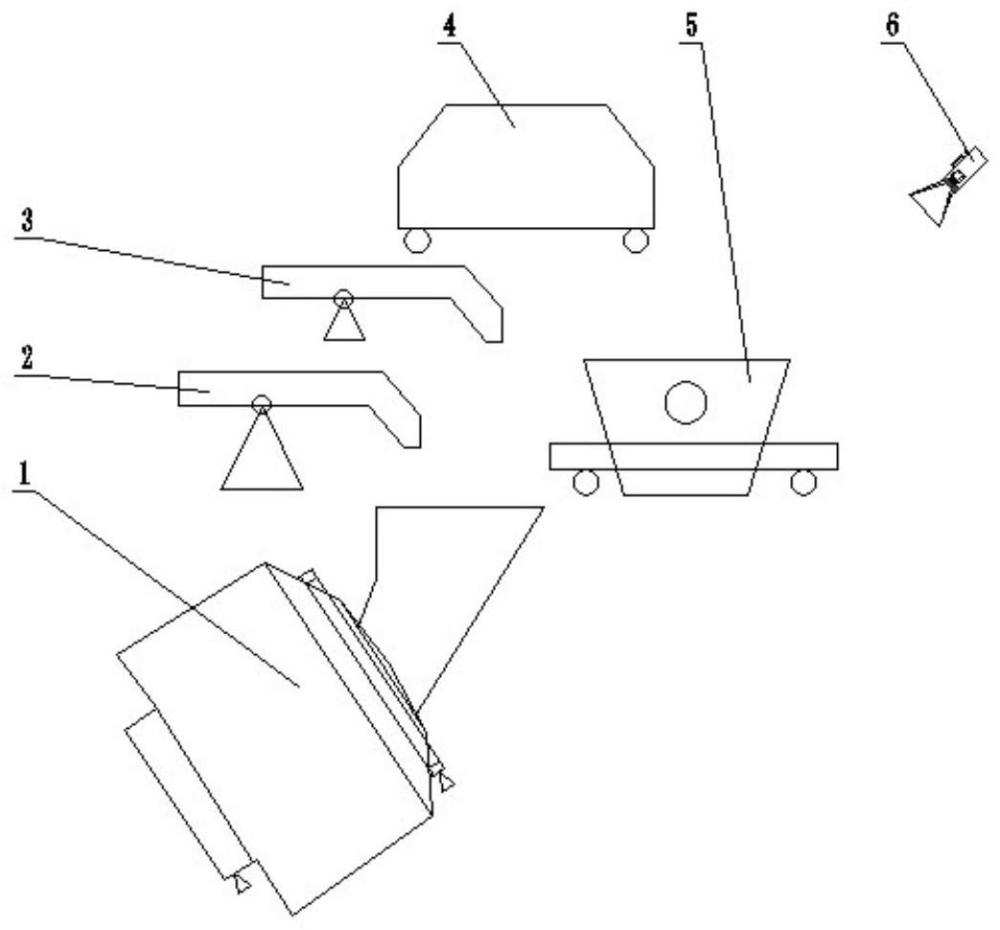
图1为本发明实施例中用于滚筒渣处理的智能化进料系统原理图;
图2为本发明实施例中料筒支撑机构具体结构分布示意图;
其中:
1-滚筒系统;2-扒渣系统;3-清渣系统;4-监测系统;5-渣罐倾翻系统;6-移动收尘装置;1-1料筒支撑机构;1-2滚筒系统进料漏斗。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-2所示,本发明提供了一种用于滚筒渣处理的智能化进料系统,包括:滚筒系统1、扒渣系统2、清渣系统3、监测系统4、渣罐倾翻系统5、移动收尘装置6等组成。本实施例中采用的滚筒系统1、扒渣系统2、清渣系统3、监测系统4、渣罐倾翻系统5均为智能化系统。具体如下:
渣罐倾翻系统5,用于获取车间需要粒化处理的高温冶金渣物料,并倒入滚筒系统1中,在所述物料执行倾翻作业过程中,实时监控所述物料状态信息并传送至监测系统4;可以理解为,辅助取代车间行车对物料的吊运以及辅助控制注料速度的功能。
滚筒系统1,用于获取所述渣罐倾翻系统5倾翻的所述物料,将所述物料处理为低温/常温状态,同时将无规则尺寸的所述物料处理成为预设规格尺寸,便于后续资源利用的颗粒物料;本实施例中处理的是来自于转炉车间或者电炉车间需要粒化处理的高温冶金渣,将高温冶金渣处理为低温(常温)冶金渣。
扒渣系统2,用于将无法靠重力流自动注入所述滚筒系统1的所述物料通过扒渣方式注入所述滚筒系统1,起辅助功能;具体扒渣方式包括搅拌、拨动等方式。
清渣系统3,用于对所述物料注入所述滚筒系统1过程中,粘附在进料漏斗内壁的残余物料进行机械清理以避免通道堵塞;
监测系统4,用于采集并监测原始的所述物料状态信息及渣处理过程中各系统运行时产生的状态变化信息;可以检测高温冶金渣来料状态,如温度、渣量、渣的形态等等、注料速度、各系统运行状态等等。
移动收尘装置6,用于动态收集渣处理过程中产生的烟尘并进行净化处理;本实施例采用的移动收尘装置6可以是移动收尘罩结构,在进料系统作业过程中承担动态收集烟尘功能,确保环保。
其中,所述物料状态信息至少包括:所述物料温度、渣量及渣的形态,所述状态变化信息包括进料速度、所述渣罐倾翻系统5的倾角信息和速度信息、所述扒渣系统2和所述清渣系统3的作业动作。
具体地,所述渣罐倾翻系统5包括渣罐、支撑框架和具备倾翻功能的第一执行机构,所述渣罐设置在所述支撑框架中,所述具备倾翻功能的第一执行机构内设有具备液压马达的行星减速机,所述支撑框架的输出轴通过联轴器与所述具备液压马达的行星减速机连接,控制所述渣罐沿其周向转动;靠近所述第一执行机构设有第二执行机构,用于控制所述渣罐、所述支撑框架和所述具备倾翻功能的第一执行机构三者联合运动。可以理解为,本发明实施例采用的渣罐倾翻系统5具备前后移动,周向转动的功能。其中周向360°转动依靠的是一个液压马达配套行星减速机实现。
本实施例采用的所述渣罐倾翻系统5还包括:
渣罐倾角测量器,设置在所述支撑框架上,用于实时测量所述渣罐的倾角信息并传输至所述监测系统4;
称重传感器,设置在所述支撑框架上,用于实时测量当前所述物料剩余重量信息并传输至所述监测系统4。本实施例采用的支撑框架起到固定渣罐的作用,采用的是钢结构框架。
具体地,所述滚筒系统1包括料筒支撑机构1-1,所述料筒支撑机构1-1上设有称重传感器,用于实时采集所述滚筒系统1内所述物料的承重数据,并将所述称重数据传输至所述监测系统4,从而为所述扒渣系统2和所述渣罐倾翻系统5发出的下一步操作指令提供依据。所述滚筒系统1还包括进料漏斗和进料筒,所述进料漏斗设置所述进料筒顶端,所述料筒支撑机构1-1设置在所述进料筒底端。本实施所述下一步操作指扒渣系统2根据监测系统4的数据信息,自动确定其自身动作如上下位置、左右位置、前后位置的速度快慢、角度大小;渣罐倾翻系统5根据智能检测数据信息,自动调节倾翻动作的角度大小、速度快慢。
具体地,所述扒渣系统2包括位置反馈装置,当扒渣执行部件运行至预设极限位置,触发电信号向所述扒渣执行部件发送关闭指令,并将当前的位置信息传输至所述监测系统4执行到位后相应的自动化控制操作,即自动确定所述扒渣系统2自身动作的速度和角度以控制所述扒渣执行部件多自由度操作,对从所述渣罐倾翻系统5获取到的所述物料执行扒渣操作从而实现所述物料扒入所述滚筒系统1的精准性。可以理解为,扒渣系统2上下、左右、前后六关节动作均带位置反馈,从而实现将固定在渣罐倾翻系统5上面渣罐里面的物料精准扒入滚筒系统1进行工艺处理的扒渣动作。
具体地,所述清渣系统3包括位置反馈装置,当清渣执行部件运行至预设极限位置,触发电信号向所述扒渣执行部件发送关闭指令,并将当前的位置信息传输至所述监测系统4执行到位后相应的自动化控制操作,即自动确定所述清渣系统3自身动作的速度和角度控制所述清渣执行部件多自由度操作,对粘附在所述滚筒系统1进料漏斗内壁上面的所述物料进行机械清理。可以理解为,清渣系统3上下、左右、前后六关节动作均带位置反馈,从而实现将粘附在智能滚筒系统1的进料漏斗内壁上面的高温物料(渣和钢的混合物)机械清理干净的目的。
进一步地,所述扒渣系统2还用于根据预设程序自动将放置在所述渣罐倾翻系统5上渣罐中的所述物料扒入所述滚筒系统1中的进料漏斗中,随着所述物料的进入的速度变化和数量变化,所述滚筒系统1上具备称重功能的料筒支撑机构1-1上的负载产生相应的变化信息,并且将所述变化信息发送至所述监测系统4执行相应的自动化控制操作;
所述监测系统4还用于当所述滚筒系统1上具备称重功能的料筒支撑机构1-1上的负载大于预设阈值,则对放置在所述渣罐倾翻系统5上的渣罐倾翻进料速度进行减速调节自动化控制,同时对所述扒渣系统2上扒渣执行部件朝上下、左右、前后方向运动的速度进行自动化控制;
当所述滚筒系统1上具备称重功能的料筒支撑机构1-1上的负载小于预设阈值,则对放置在所述渣罐倾翻系统5上的渣罐倾翻进料速度进行加速调节自动化控制,同时对所述扒渣系统2上扒渣执行部件朝上下、左右、前后方向运动的速度进行自动化控制。
为了减少对操作人员技能的依赖,提高生产效率,降低劳动强度,本发明实施例所采用的所述监测系统4包括:
温度传感器,用于采集并监测渣罐中当前所述物料的温度数据;和/或,
雷达,用于采集并监测渣罐中当前所述物料的液位数据;
3D扫描装置,用于检查渣罐及所述物料实时状态;
图像视频数据处理器,用于采集并监控渣处理过程中的图像和视频;
动作控制器,用于按照预设算法执行进料操作。
本领域技术人员可以理解,本发明实施例所采用的监测系统4包括用于检测渣罐中的物料温度的温度传感器,取代人力资源的执行应用,以前靠人的听力、视力、触觉等方式识别的东西现在通过这些传感器,雷达等等来实现、检测渣罐中的物料液位的雷达、渣罐及其物料实时状态(容量、倾角)的3D扫描装置、图像视频数据处理器、智能化进料系统动作控制器等,实现取代操作人员对物料状态进行判断、实现无须操作人员干预按照算法的智能化进料动作。
具体实施过程如下:将装有物料的渣罐放置在渣罐倾翻系统5上,通过前后移动和周向转动的功能,实现往滚筒系统1中倒入物料的作业工序,在物料倒入过程中,基于渣罐倾翻系统5上配置物料称重功能以及渣罐倾角测量器,实时将物料剩余重量以及渣罐倾角数据传送至监测系统4,综合根据监测系统4检测渣罐中的物料温度的温度传感器、检测渣罐中的物料液位的雷达、渣罐及其物料实时状态(容量、倾角)3D扫描装置、图像视频数据处理器、智能化进料系统动作控制器等,扒渣系统2根据预先编辑的程序自动将放置在渣罐倾翻系统5上渣罐中的物料扒入滚筒系统1中的滚筒系统1进料漏斗中,随着物料的进入的快慢、多少变化,滚筒系统1带称重传感功能的支撑机构的负载会相应发生变化,并且将相关数据发送给监测系统4,如果滚筒系统1带称重传感功能的支撑机构的负载过大,则通过监测系统4自动调慢放置在渣罐倾翻系统5上的渣罐倾翻进料速度,同时自动控制扒渣系统2上下、左右、前后六关节的动作速度;反之,则通过监测系统4自动调快放置在渣罐倾翻系统5上的渣罐倾翻进料速度和扒渣系统2上下、左右、前后六关节的动作速度;
当正常进渣作业结束后,往往会在滚筒系统1进料漏斗内壁形成一些高温渣、高温钢的粘附物,通过监测系统4自动控制清渣系统3上下、左右、前后六关节动作,从而实现将粘附在滚筒系统1进料漏斗内壁上面的高温物料机械清理干净的目的,避免人工清理劳动强度大、工况温度高等不利工作环境;
在滚筒渣处理的智能化进料系统运行工艺过程中,移动收尘装置6始终处于工艺最佳收集烟尘的位置,确保及时、可靠地将工艺过程中产生的烟尘净化后外排,在工艺流程结束或者日程检修工况,移动收尘装置6能够后退置检修位。
综上所述,本发明实施例提供的一种用于滚筒渣处理的智能化进料系统,基于智能滚筒系统1、智能扒渣系统2、智能清渣系统3、智能渣罐倾翻系统5、移动收尘装置6等相关系统或者结构各种传感器的配置,凭借智能监测系统4实时对图像或者视频信息的自动处理,最终实现自动控制滚筒系统1、扒渣系统2、清渣系统3、渣罐倾翻系统5、移动收尘装置6等相关系统或者结构的工艺动作,彻底降低滚筒渣处理的进料系统对操作人员技能成熟度的依赖,消除和杜绝操作人员操作失误带来的设备损坏或者人员伤害,改善操作人员劳动强度和作业环境,提高滚筒渣处理自动化、智能化水平。
基于相同的构思,本发明还提供了一种用于滚筒渣处理的智能化进料方法,包括:
获取车间需要粒化处理的高温冶金渣物料,并倒入滚筒系统1中,在所述物料执行倾翻作业过程中,实时监控所述物料状态信息并传送至监测系统4;
获取所述渣罐倾翻系统5倾翻的所述物料,将所述物料处理为低温/常温状态,同时将无规则尺寸的所述物料处理成为预设规格尺寸;
将无法靠重力流自动注入所述滚筒系统1的所述物料通过扒渣方式注入所述滚筒系统1;
对所述物料注入所述滚筒系统1过程中,粘附在进料漏斗内壁的残余物料进行机械清理以避免通道堵塞;
采集并监测原始的所述物料状态信息及渣处理过程中各系统运行时产生的状态变化信息;
动态收集渣处理过程中产生的烟尘并进行净化处理。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。