一种基于机器视觉的喷火除草机器人
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及设施园艺植保智能装备、大田作物植保智能装备和农业机器人技术领域,尤其涉及到一种基于机器视觉的喷火除草机器人。
背景技术
农田杂草直接或间接影响着农业生产,影响农作物的产量、质量和品质。杂草与作物争夺养分、水分、阳光和空间,妨碍田间通风透光,增加局部气候温度,有些则是病虫中间宿主,促进病虫害传播。
目前的除草方式主要是喷洒除草剂或人工除草。使用化学除草剂对非靶标生物直接杀伤或慢性危害大,严重破坏农业生态平衡,并造成环境污染;人工除草劳动强度大、效率低、成本高。为了解决上述问题,申请号为2018107495766的中国专利公开了一种基于视觉的火焰除草机器人系统及实现方法,其采用火焰进行除草,在一定程度上解决了除草剂和人工除草存在的弊端,但是其机器人在使用时,由于火焰的存在,会对移动小车和机械手造成高温烘烤,影响使用寿命。
发明内容
本发明针对现有技术的不足,提供一种基于机器视觉的喷火除草机器人,避免了火焰对设备造成高温损伤。
本发明是通过如下技术方案实现的,提供一种基于机器视觉的喷火除草机器人,包括行走系统,以及安装在所述行走系统上的喷火除草装置和摄像头,喷火除草装置包括燃气罐,以及与燃气罐通过燃气管道连通的火焰喷枪,所述火焰喷枪位于行走系统后方,且通过刚性管与行走系统连接。
本方案通过行走系统的移动实现机器人的行走,通过摄像头采集杂草的图像信息,并将图像信息发送给自动控制模块,控制喷火除草装置,通过燃气罐对燃气进行存储,通过火焰喷枪喷出的火焰灼烧杂草,通过将火焰喷枪设置在行走系统的后方,避免了火焰对设备造成高温烘烤,通过设置刚性管,增大了火焰喷枪与行走系统之间的距离,进一步减小了设备收到的高温影响。
作为优化,燃气管道一端与燃气罐连接,另一端穿过刚性管后与火焰喷枪连接。本优化方案将靠近火焰喷枪的燃气管道穿设在刚性管中,利用刚性管对燃气管道形成防护,减小了火焰对燃气管道的损伤。
作为优化,刚性管通过高度调节机构与行走系统连接。本优化方案通过设置高度调节结构,实现刚性管高度的调节,从而实现火焰喷枪的高度调节,满足不同生长阶段的杂草清除。
作为优化,高度调节机构包括与刚性管固定连接的弧形拐臂和沿横向穿过弧形拐臂且与行走系统的机架固接的定位螺栓。本优化方案的高度调节机构结构简单,操作方便,需要调节时,松动定位螺栓,转动弧形拐臂的角度即可,然后拧紧定位螺栓,对弧形拐臂进行定位。
作为优化,弧形拐臂上的定位螺栓穿过孔为倾斜的长孔,长孔朝向火焰喷枪的一端低于另一端。本优化方案通过设置长孔,松动定位螺栓以后可以整体移动弧形拐臂,从而实现火焰喷枪高度的进一步调节。
作为优化,弧形拐臂的后端延伸出行走系统的机架,且在弧形拐臂的后端通过横向铰轴铰接有支撑板,所述支撑板与刚性管固接,行走系统的机架上设有若干沿高度方向布置且与支撑板下边缘适配的支撑槽。本优化方案通过将支撑板支撑在支撑槽中,避免由于定位螺栓松动而造成弧形拐臂向下旋转,从而避免火焰喷枪自行下移。
作为优化,所述行走系统包括安装有驱动轮和行走轮的底盘,以及与底盘固接的机架,驱动轮连接动力装置且位于行走轮的后方,行走轮与驱动轮之间通过链条传动连接。本优化方案的行走系统通过驱动轮接收动力,驱动轮通过链条带动行走轮转动,实现设备的四驱行走,满足复杂的行走工况。
作为优化,机架包括固接在底盘顶面的传动箱,以及与传动箱固接且沿左右方向分布的两防护栏,两防护栏之间设有动力装置,传动箱内安装有连接动力装置和驱动轮的传动机构。本优化方案通过设置防护栏,给操作者提供安全防护,传动箱既起到安装传动机构的作用,同时又给安装防护栏提供载体,使整机结构更加合理紧凑。
作为优化,防护栏包括向上拱起的弧形杆和自弧形杆的两端向下延伸的直杆,弧形杆前端的直杆与传动箱的前端面固接,弧形杆后端的直杆与传动箱的后端面固接。本优化方案的防护栏结构简单,制作方便,通过设置弧形杆,提高了抗压强度,通过设置直杆,方便防护栏通过焊接进行固定。
作为优化,火焰喷枪包括同轴固接的锥筒和柱筒,锥筒的小径端与燃气管道连接,锥筒的大径端与柱筒连接,锥筒上开设有若干进气孔,柱筒远离锥筒的一端固接有喷火挡板,喷火挡板上开设有位于中心位置的主喷火口和位于主喷火口周围的侧喷火口。本优化方案通过设置进气孔和侧喷火口,使燃气燃烧更充分,燃烧火焰集中且穿透力强。
本发明的有益效果为:利用喷火除草装置喷射的高温火焰灼烧杂草并快速灭草,高温灼烧除草期间不会引发环境污染、杂草群落变迁等,火焰的高温可以起到灭杀病虫害和细菌的作用,起到了绿色、环保、高效的目的;
通过改良火焰喷枪,增设进气孔和侧喷火口,提高了火焰利用率;
设备结构简单,设计合理,可以对田间的杂草进行精确定位灼烧清除,大大节约了农民的时间,降低了劳动强度,提高了经济效益。
附图说明
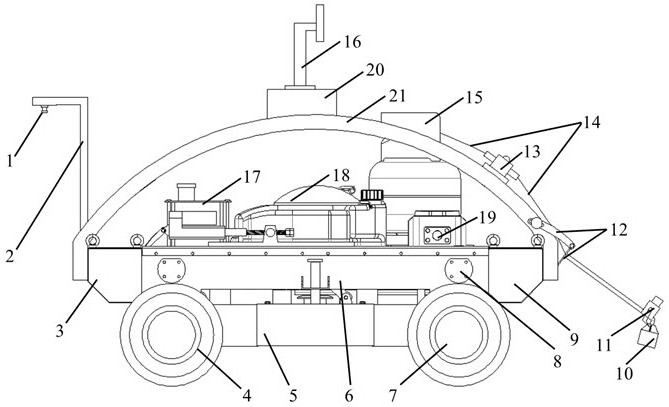
图1为本发明结构示意图;
图2为行走系统传动箱结构示意图;
图3为火焰喷枪主视图;
图4为火焰喷枪仰视图;
图中所示:
1、摄像头;2、固定杆;3、机架;4、行走轮;5、底盘;6、传动箱;7、驱动轮;8、驱动电机;9、电池组;10、火焰喷枪;11、电子打火开关;12、高度调节机构;13、防爆电磁阀;14、燃气管道;15、燃气罐;16、显示屏;17、汽油箱;18、发动机;19、发电机;20、自动控制模块;21、防护栏;22、进气孔;23、侧喷火口。
具体实施方式
为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
如图1所示一种基于机器视觉的喷火除草机器人,包括行走系统,以及安装在所述行走系统上的喷火除草装置、摄像头1和自动控制模块20。
行走系统包括安装有驱动轮7和行走轮4的底盘5,以及与底盘固接的机架3,驱动轮7和行走轮4分别为两个,呈矩形分布,驱动轮连接动力装置且位于行走轮的后方,行走轮与驱动轮之间通过链条传动连接。动力装置包括设置在机架上的汽油箱17、发动机18、发电机19、驱动电机8和电池组9,机器人行走系统为四驱,发动机带动发电机运转为电池组充电,电池组为驱动电机提供动力使得机器人在田间行走,并为自动控制模块20提供电力。机架包括固接在底盘顶面的传动箱6,以及与传动箱固接且沿左右方向分布的两防护栏21,两防护栏之间设有动力装置,传动箱内安装有连接动力装置和驱动轮的传动机构,本实施例的传动机构为位于驱动电机8与驱动轮7之间的链轮减速器。传动箱的后端设置有电池箱,防护栏与电池箱的后端面固接,电池箱内设有电池组9。防护栏上设置显示屏16和自动控制模块,且显示屏16位于自动控制模块的上方。
摄像头1通过固定杆2安装于在机架3的前端上方,用于采集杂草和农作物的图像信息,通过杂草识别算法分辨出杂草并计算杂草位置,将杂草的位置发送给自动控制模块,控制喷火除草装置喷火,进而高温灼烧杂草达到高效物理除草的目的。
本实施例的防护栏包括向上拱起的弧形杆和自弧形杆的两端向下延伸的直杆,弧形杆前端的直杆与传动箱的前端面固接,弧形杆后端的直杆与传动箱的后端面固接。
喷火除草装置包括防爆电磁阀13、电子打火开关11、燃气罐15,以及与燃气罐通过燃气管道14连通的火焰喷枪10,所述火焰喷枪10位于行走系统后方,且通过刚性管与行走系统连接,燃气管道一端与燃气罐连接,另一端穿过刚性管后与火焰喷枪连接。燃气罐15用于储存点火所需燃气;防爆电磁阀13通过燃气管道14安装在临近燃气罐处的防护栏21上,可以控制燃气流量,起到控制火焰大小的作用;电子打火开关11安装在火焰喷枪10的喷火口上方,受自动控制模块控制,起到点燃燃气的作用。
火焰喷枪包括同轴固接的锥筒和柱筒,锥筒的小径端与燃气管道连接,锥筒的大径端与柱筒连接,锥筒上开设有若干进气孔22,柱筒远离锥筒的一端固接有喷火挡板,喷火挡板上开设有位于中心位置的主喷火口和位于主喷火口周围的侧喷火口23。通过增加进气孔22与侧喷火口23,使得燃气燃烧更充分,燃烧火焰集中且穿透力强。
本实施例的火焰喷枪排列为左右方向一排,每两个一组,每一组喷枪连接一个防爆电磁阀和电子打火装置;防爆电磁阀与电子打火装置均与自动控制模块连接,自动控制模块通过控制防爆电磁阀以控制燃气火焰的强弱。
刚性管通过高度调节机构12与行走系统连接,通过火焰喷枪高度调节机构调节火焰喷射的高度,有效清除不同生长阶段的杂草。高度调节机构包括与刚性管固定连接的弧形拐臂和沿横向穿过弧形拐臂且与行走系统的机架固接的定位螺栓。弧形拐臂上的定位螺栓穿过孔为倾斜的长孔,长孔朝向火焰喷枪的一端低于另一端。弧形拐臂的后端延伸出行走系统的机架,且在弧形拐臂的后端通过横向铰轴铰接有支撑板,所述支撑板与刚性管固接,行走系统的机架上设有若干沿高度方向布置且与支撑板下边缘适配的支撑槽。本实施例中,横向铰轴为水平螺栓,水平螺栓上设置紧固螺母,用于将支撑板与弧形拐臂相对固定。
自动控制模块包括电机驱动器、防爆电磁阀驱动器、图像处理及杂草识别功能模块、嵌入式平台以及显示器组成。电机驱动模块用于控制自走驱动系统;防爆电磁阀驱动器用于控制燃气流量大小;图像处理及杂草识别功能模块用于接收摄像头图像并进行图像处理和杂草识别;嵌入式平台用于接收杂草的位置、控制除草机器人的运动和喷头喷火控制等;显示器用于显示杂草实时识别情况。采用实时图像识别技术,精准高效,通过摄像头拍摄杂草图像并进行图像处理和杂草识别,计算杂草的位置,控制行走系统,控制防爆电磁阀和电子打火装置的开启,进行喷火除草作业,从而实现快速精准的物理除草。
本实施例的一种基于机器视觉的喷火除草机器人,在除草作业的过程中,发动机带动发电机运转为电池组充电,电池组为驱动电机提供动力使得机器人在田间行走,并为自动控制模块20提供电力,由摄像头1采集杂草和农作物的图像信息,并将图像信息发送到位于显示屏16下方的自动控制模块20,控制喷火除草装置中的电子打火开关和防爆电磁阀,点燃燃气并控制燃气流量,调节火焰大小,实现喷火除草。摄像头与自动控制模块之间,控制模块与电子打火开关、防爆电磁阀之间的连接属于现有技术,不再赘述。
当然,上述说明也并不仅限于上述举例,本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本发明的技术方案并非是对本发明的限制,参照优选的实施方式对本发明进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换都不脱离本发明的宗旨,也应属于本发明的权利要求保护范围。
- 一种基于机器视觉的喷火除草机器人
- 一种基于机器视觉的智能除草机器人系统