车路协同环境下基于多车运动特征的信息可信辨识方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及车路协同及网络安全技术领域,尤其涉及一种车路协同环境下基于多车运动特征的信息可信辨识方法。
背景技术
车路协同系统及技术是新一代智能交通系统的发展趋势,基于车-车、车-路的实时交互,可以实现更加高效、安全的交通组织与管理效益。如何确保交通信息交互的安全可靠,对于车路协同系统的应用具有重要意义。
车路协同系统的核心功能如车辆安全辅助驾驶、基于车路协同的自动驾驶、多车协同驾驶等,都需要依靠稳定和可信的交通信息交互才能得以实现。目前,对于车路协同系统中的交通信息交互,传统的信息安全技术重点在于:
(1)通信层:通信稳定、交互频率
(2)数据层:身份认证、数据加解密
但是,对于当前车路协同系统的应用环境而言,其对于交通信息的可靠性需求,不能只考虑传统通信层面的可靠性和安全性,还需要结合交通业务特征来甄别交互信息的可信程度,从而避免由于交通信息异常导致的包括系统整体功能失效在内的多种风险的发生。
发明内容
本发明的目的是提供一种车路协同环境下基于多车运动特征的信息可信辨识方法,能够有效提高车路协同环境下交通信息交互的安全性和可靠性。
本发明采用的技术方案为:
车路协同环境下基于多车运动特征的信息可信辨识方法,包括
S1、确定多车层面信息交互可信度辨识所基于的特征属性,根据特征属性采集对应的业务特征;
多车层面信息交互可信度辨识所基于的特征属性包括跟驰、换道和超车;
S2、根据特征属性构建多车层面的可信特征模型,采用可信特征模型检测所采集的业务特征是否合法:终端采集的业务特征输入对应可信特征模型,比较边界数据值与采集的数值,判断采集的业务特征是否合法,合法则为可信特征,反之则为不可信特征;
S3、对于可信特征,终端直接使用,对于不可信特征,终端不使用并作为异常信息上报。
进一步地,所述步骤S2具体包括:
(a)当特征属性为跟驰时,步骤S2过程如下:
1.1:构建以加速度为因变量,以期望间距和辆车速度差为影响跟驰车加减速的直接因素的跟驰模型:
公式(1)中,a(t)为跟驰车辆加速度,α为驾驶员对车辆跟驰间距变化的敏感系数,β为驾驶员对车辆相对速度的敏感系数,Δx
1.2:采用跟驰模型计算基于不同驾驶员敏感系数下的车辆加速度,构建加速度合法区间A
采用跟驰模型计算待测车辆在k位置点的加速度a
1.3:终端采集设备采集待测车辆加速度a
1.4:判断终端采集的车辆加速度a
(b)当特征属性为换道时,步骤S2过程如下:
2.1:构建包裹换道车辆图形的椭圆汽车模型:定义L
公式(2-1)中,L为汽车长度,W为汽车宽度,V
2.2:基于驾驶员对换道环境承受能力数值,构建椭圆最小安全距离换道模型,计算换道车辆与四周车辆的最小纵向安全距离范围;
定义M为换道汽车,L
正常换道时的最小纵向安全距离包括:
1)汽车M与汽车L
2)汽车M与汽车L
3)汽车M与汽车F
2.3:终端采集换道车辆与四周车辆的间距D
2.4:判断终端采集的间距D
(c)当特征属性为超车时,步骤S2过程如下:
3.1:构建基于超车的可信特征模型,计算超车汽车在整个超车过程中的总行驶距离;定义汽车F为超车汽车,汽车L为被超汽车,汽车M为被超汽车L的前车;
超车汽车F在整个超车过程中的总行驶距离S
S
公式(3-1)中,S
3.2:基于不同类型驾驶员超车时的车头时距值DSH,计算汽车F在整个超车过程中总行驶距离S
具体为:
超车过程包括汽车加速换道阶段和汽车匀速并道阶段两个阶段;两个阶段具体过程为:
加速换道阶段:汽车F以初速度
匀速并道阶段:汽车F保持理想超车速度
计算汽车F在超车过程中的安全距离d
公式(3-2)中,
基于驾驶员DSH值的汽车F的总行驶距离S
基于不同的DSH值计算的总行驶距离S
3.3:终端采集超车车辆在超车过程中行驶的总距离S
3.4:判断终端采集的超车车辆在超车过程中行驶的总距离S
进一步地,所述步骤2.2具体包括
(1)构建换道车辆M与换道汽车当前所在车道的前车L
公式(2-2)中,V
(2)构建换道车辆M与换道汽车目标车道的前车L
公式(2-3)中,V
(3)构建换道车辆M与换道汽车目标车道的后车F
公式(2-4)中,V
本发明具有以下有益效果:
通过在传统信息交互安全的基础上,结合交通业务特征,构建基于多车层面交通特征分析的信息可信辨识模型及方法,有效解决因人为伪造、恶意篡改、设备异常等行为产生的不符合交通业务特征的数据和信息对车路协同环境下的交通系统所带来的隐患,实现对现有车路协同环境下交通系统信息交互安全性与可靠性的提升。
附图说明
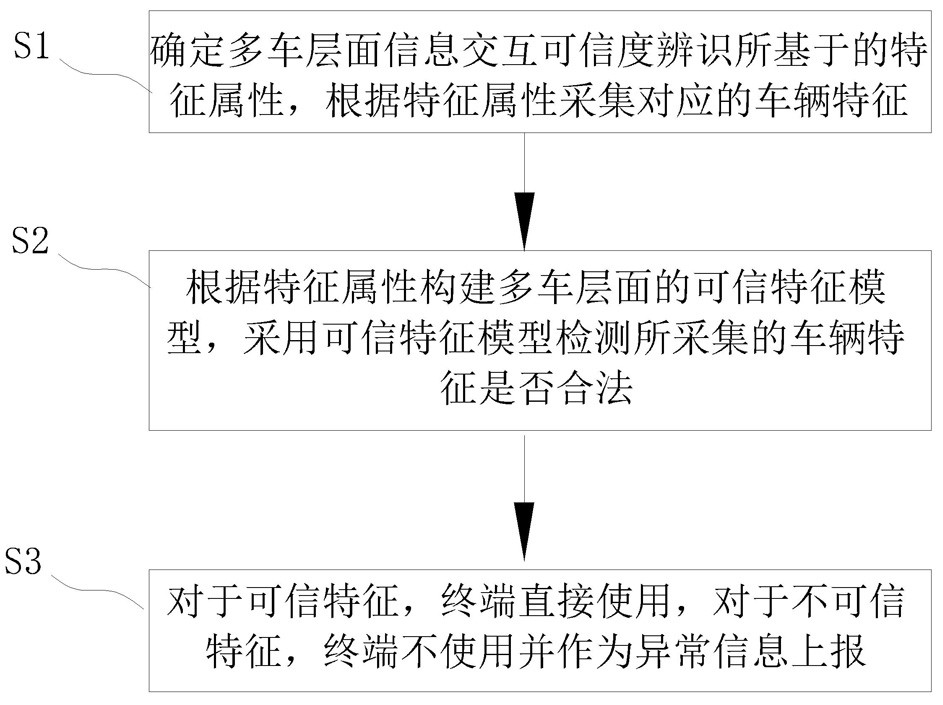
图1为本发明的流程图;
图2为实施例一的仿真试验结果图;
图3为实施例二中的椭圆汽车模型图;
图4为实施例二中换道前汽车位置关系示意图;
图5为实施例二中汽车换道角度示意图;
图6为实施例二中汽车M和汽车L
图7为实施例二中汽车M和汽车L
图8为实施例二中汽车M和汽车F
图9为实施例二的仿真试验结果图;
图10为实施例三中超车过程中汽车运动位置关系示意图;
图11为实施例三中超车过程汽车位置关系示意图;
图12为实施例三的仿真试验结果图。
具体实施方式
如图1所示,车路协同环境下基于多车运动特征的信息可信辨识方法,包括
S1、确定多车层面信息交互可信度辨识所基于的特征属性,根据特征属性采集对应的业务特征;
多车层面信息交互可信度辨识所基于的特征属性包括跟驰、换道和超车;
S2、根据特征属性构建多车层面的可信特征模型,采用可信特征模型检测所采集的业务特征是否合法:终端采集的业务特征输入对应可信特征模型,比较边界数据值与采集的数值,判断采集的业务特征是否合法,合法则为可信特征,反之则为不可信特征;
S3、对于可信特征,终端直接使用,对于不可信特征,终端不使用并作为异常信息上报。
为了更好地理解本发明,下面结合具体实施例对本发明的技术方案做进一步说明。
本发明依据驾驶员模型,从驾驶行为的角度判断信息的可信性,驾驶员模型研究驾驶员驾驶车辆的行为,利用数学表达式,模拟汽车驾驶过程。
实施例一:特征属性为跟驰
汽车跟驰描述了相邻行驶的两车之间的相互作用。在汽车跟驰模型中,汽车被看成是离散的、存在相互作用的粒子,假设在没有超车的情况下,研究后车跟随前车的动力学过程。
目前比较常见的安全距离汽车跟驰模型是Gipps模型,该模型假设汽车速度是由当前的理想速度、所允许的最大加速度或减速度和安全制动距离三者共同决定。
根据Gipps模型,在时间段[t,t+T]内,车辆速度是达到理想速度和保持安全车距的减速度二者之间的小者,其表达式如下:
公式(6-2)中,
本实施例具体过程如下:
S1、确定多车层面信息交互可信度辨识所基于的特征属性为跟驰,根据特征属性采集对应的业务特征。
S2、根据特征属性构建多车层面的可信特征模型,采用可信特征模型检测所采集的业务特征是否合法:终端采集的业务特征输入对应可信特征模型,比较边界数据值与采集的数值,判断采集的业务特征是否合法,合法则为可信特征,反之则为不可信特征。具体为:
1.1:构建以加速度为因变量,以期望间距和辆车速度差为影响跟驰车加减速的直接因素的跟驰模型:
公式(1)中,a(t)为跟驰车辆加速度,α为驾驶员对车辆跟驰间距变化的敏感系数,β为驾驶员对车辆相对速度的敏感系数,Δx
本实施例将驾驶员分为高敏感度、中敏感度、底敏感度三类,三类的区分点由驾驶行为数据统计分析得出;驾驶员敏感度的取值范围如表1所示:
表1驾驶员敏感度分类
1.2:采用跟驰模型计算不同驾驶员敏感系数下的车辆加速度,构建加速度合法区间A
采用跟驰模型计算待测车辆在k位置点的加速度a
1.3:终端采集设备采集待测车辆加速度a
1.4:判断终端采集的车辆加速度a
S3、对于可信特征,终端直接使用,对于不可信特征,终端不使用并作为异常信息上报。
下面通过仿真试验进行验证。
以高敏感度的驾驶员为例,高敏感度的驾驶员取0.7≤α≤1和0.7≤β≤1,汽车选择微型车哈弗H2自动时尚型,仿真结果可视化如图2所示。
由图2可以看出,在采样的五个位置点中,路侧设备或智能车载设备返回的加速度值均在当前的高敏感度的驾驶员的合理驾驶区间之内,因此,可以初步认为在这段跟驰过程中,汽车的加速度数据正常。
实施例二:特征属性为换道
汽车换道分为强制性换道和自由性换道,是汽车驾驶员为了提高驾驶舒适度或者为了追求更理想的驾驶环境,在对周边车辆的行驶速度、间距、交通流量以及道路情况等一系列信息做出判断分析后,从某一车道换成另一车道行驶的过程。
由于换道过程相对复杂,简单的矩形汽车模型较难很好地反映出汽车的几何外形尺寸对换道时汽车发生碰撞的影响,故本发明将正在换道中的汽车建模为如图3所示椭圆汽车模型。
本实施例的具体过程如下:
S1、确定多车层面信息交互可信度辨识所基于的特征属性为换道,根据特征属性采集对应的业务特征。
S2、根据特征属性构建多车层面的可信特征模型,采用可信特征模型检测所采集的业务特征是否合法:终端采集的业务特征输入对应可信特征模型,比较边界数据值与采集的数值,判断采集的业务特征是否合法,合法则为可信特征,反之则为不可信特征。具体为:
2.1:构建包裹换道车辆图形的椭圆汽车模型:定义L
公式(2-1)中,L为汽车长度,W为汽车宽度,V
2.2:基于驾驶员对换道环境承受能力数值,构建椭圆最小安全距离换道模型,计算换道车辆与四周车辆的最小纵向安全距离范围。
换道过程中的最小安全距离是在保证行驶安全的情况下,两车之间的最小间距,它与汽车的速度、换道时间、汽车间相对速度、汽车加速度和驾驶员类型有关。本发明考虑驾驶员类型行为对换道的影响并引入驾驶员类型作为其中的变量,引入驾驶员对换道环境的承受能力T。本实施例中将驾驶员类型分为保守型、谨慎型、常规型、激进型和冒险型五种类型,五种类型驾驶员的T值范围如表2所示:
表2驾驶员T值
如图4和图5所示,定义M为换道汽车,L
正常换道时,汽车M需要满足以下条件:
1)汽车M与汽车L
2)汽车M与汽车L
3)汽车M与汽车F
故正常换道时的最小纵向安全距离包括:
1)汽车M与汽车L
2)汽车M与汽车L
3)汽车M与汽车F
下面对这三种条件分别进行分析。
(1)如图6所示,考虑汽车M和汽车L
D
公式(2-5)中,S
如果汽车M的速度小于当前车道上的前车L
如果汽车M的速度等于当前车道上的前车L
如果汽车M的速度大于当前车道上的前车L
公式(2-2)中,V
(2)如图7所示,考虑汽车M和汽车L
公式(2-6)中,S
在换道时,汽车M由慢车道进入快车道,所以汽车M的速度会小于目标车道上的前车L
公式(2-3)中,V
(3)如图8所示,考虑汽车M和汽车F
D
公式(2-7)中,S
在换道时,汽车M由慢车道进入快车道,所以汽车M的速度会小于目标车道上的后车F
公式(2-4)中,V
2.3:在汽车做出换道行为时,某一时刻由路侧设备或智能车载设备返回换道车辆与四周车辆的间距D
2.4:判断终端采集的间距D
S3、对于可信特征,终端直接使用,对于不可信特征,终端不使用并作为异常信息上报。
下面通过仿真试验进行验证。
换道汽车选择大中型车宇通ZK6120HQ,驾驶员类型设置为谨慎型驾驶员,T值范围为0.2 实施例三:特征属性为超车 驾驶过程中,超车行为是一个相对普遍频繁的驾驶行为,由于换道过程中汽车速度较快、换道过程较短,极易发生碰撞行为。从建模分析的角度看,它过程相对复杂,既包含了跟驰行为,又包含了换道行为。 不同驾驶风格的驾驶员对在超车时,对前后两车的车头时距的要求和敏感度不同,换句话说,不同类型的驾驶员在某一车头时距下做出超车行为的概率不同,不同类型的驾驶员在做出超车行为时的车头时距也不同。 本发明将根据超车时的车头时距DSH的不同,将驾驶员分为以下3类:谨慎型、常规性、激进型。驾驶员DSH值的定义范围如表3所示: 表6.3驾驶员DSH值
本实施例具体过程如下: S1、确定多车层面信息交互可信度辨识所基于的特征属性为超车,根据特征属性采集对应的业务特征。 S2、根据特征属性构建多车层面的可信特征模型,采用可信特征模型检测所采集的业务特征是否合法:终端采集的业务特征输入对应可信特征模型,比较边界数据值与采集的数值,判断采集的业务特征是否合法,合法则为可信特征,反之则为不可信特征。具体为: 3.1:构建基于超车的可信特征模型,计算超车汽车在整个超车过程中的总行驶距离。 如图10所示,定义汽车F为超车汽车,汽车L为被超汽车,汽车M为被超汽车L的前车。在正常的超车过程中,为了保证行车安全而不发生碰撞,应该满足以下条件: (1)在超车行为发生之前,汽车F与汽车L之间应该有足够的安全时距,需要保证当汽车L减速或紧急制动时,两车不会发生碰撞; (2)在超车行为发生过程中,超车汽车F总行驶距离S (3)在超车行为结束之后,汽车F与汽车L之间同样需要保持足够的安全时距,以防止汽车F减速或紧急制动时,两车不会发生碰撞。 据此可知,超车汽车F在整个超车过程中的总行驶距离S S 公式(3-1)中,S 3.2:基于不同类型驾驶员的超车时的车头时距值DSH,计算汽车F在整个超车过程中总行驶距离S 如图11所示,超车过程包括汽车加速换道阶段和汽车匀速并道阶段两个阶段;两个阶段具体过程为: 1)加速换道阶段:汽车F以初速度 2)匀速并道阶段:汽车F保持理想超车速度 计算汽车F在超车过程中的安全距离d
公式(3-2)中, 基于驾驶员DSH值构建超车模型:
公式(3-3)中,S 基于不同的DSH值计算的总行驶距离S 3.3:在汽车做出超车行为时,某一时刻由路侧设备或智能车载设备返回采集超车车辆在超车过程中行驶的总距离S 3.4:判断终端采集的超车车辆在超车过程中行驶的总距离S S3、对于可信特征,终端直接使用,对于不可信特征,终端不使用并作为异常信息上报。 下面通过仿真试验进行验证。 超车汽车选择小客车林肯领航员尊耀版,当前车道上的被超车汽车也选择小客车林肯领航员尊耀版,驾驶员类型选择常规型,即超车时的DSH为1.2s 与汽车换道相同,汽车超车过程中也涉及到了多辆在途行驶汽车的信息交互,所以需要考虑通讯能力的限制。在本实施例的模型中,超车的汽车只需与当前道路和超车道路上的最近的几辆汽车进行信息交互,汽车数量较少、交互范围跨度不大,可以认为该模型中的信息交互在当前通讯水平的覆盖范围之内。 综上所述,本发明结合车路协同环境下多车运动特征分析以及多车信息交互逻辑,选择多车交互下的跟驰、换道、超车等典型场景构建多车信息交互可信辨识模型,采用可信辨识模型检测多车交互产生的信息是否合法,对于合法的交互信息,终端直接使用,对于不合法异常交互信息,终端执行异常信息上报并启动应急模式,有效解决了因人为伪造、恶意篡改、设备异常等情况产生的不符合交通业务特征的数据和信息对车路协同环境下的交通系统所带来的安全问题,实现对现有车路协同环境下交通系统信息交互安全性与可靠性的提升。
- 车路协同环境下基于多车运动特征的信息可信辨识方法
- 车路协同环境下基于单车运动特征的信息可信辨识方法